1、内容简介
略
26-可以交流、咨询、答疑
2、内容说明
无迹卡尔曼滤波 无迹卡尔曼滤波 无迹卡尔曼滤波
3、仿真分析
%该文件用于编写无迹卡尔曼滤波算法及其测试
%注解:主要子程序包括:轨迹发生器、系统方程
% 测量方程、UKF滤波器
%---------------------------------------
function UKFmain
%------------------清屏----------------
close all;clear all;
clc; tic;
global Qf n; %定义全局变量
%------------------初始化--------------
stater0=[220; 1;55;-0.5]; %标准系统初值
state0=[200;1.3;50;-0.3]; %测量状态初值
%--------系统滤波初始化
p=[0.005 0 0 0;0 0.005 0 0;0 0 0.005 0;0 0 0 0.005]; %状态误差协方差初值
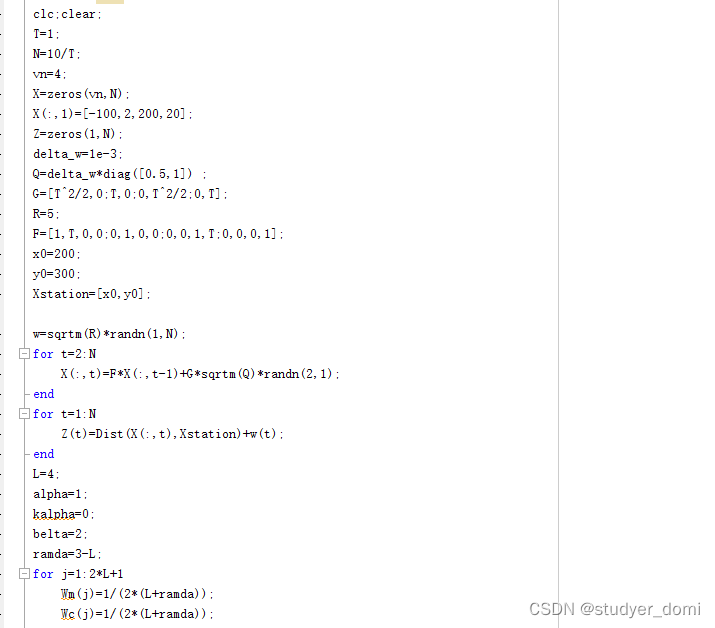
n=4; T=3;
Qf=[T^2/2 0;0 T;T^2/2 0;0 T];
%--------------------------------------
stater=stater0;state=state0; xc=state;
staterout=[]; stateout=[];xcout=[];
errorout=[];tout=[];
t0=1; h=1; tf=1000; %仿真时间设置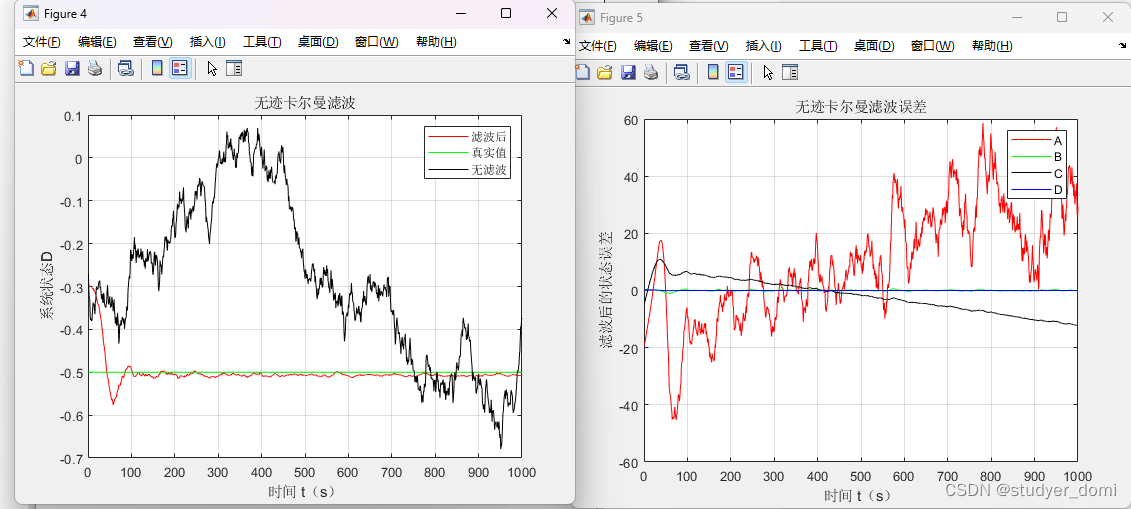
4、参考论文
略
链接:https://pan.baidu.com/s/1AAJ_SlHseYpa5HAwMJlk1w
提取码:rvol


)









)

-使用sed处理文本)




)