1. 功能描述
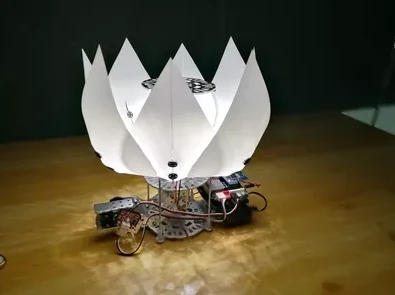
莲花灯是一款基于莲花形象设计的机器人,本文示例将用两种模式来实现莲花灯的亮灭功能。
自主模式:用 光强传感器 控制莲花灯的灯叶开合。暗光情况下灯叶打开,灯亮;强光情况下灯叶闭合,灯灭。
遥控模式:采用 蓝牙串口模块控制灯叶开合。灯叶打开,灯亮;灯叶闭合,灯灭。

2. 结构说明
莲花灯采用“探索者”结构件搭建、辅以外观设计而成,由曲柄摇杆机构和平行四连杆机构构成一个二级升降机构,通过杠杆来控制莲花灯的开合。

莲花灯的灯叶开合主要是由膨胀机构来控制的,膨胀轮是整个结构的核心部分,这种结构的优点是可实现收缩和膨胀,从而来控制灯叶的开合。

3. 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:

电路连接:
① 灯带:连在Bigfish扩展板的D9、D10接口上
② 舵机:连在Bigfish扩展板的D4端口上
③ 蓝牙串口模块:安装在Bigfish扩展坞上
④ 光强传感器:连在Bigfish扩展板的A0端口上
4. 功能实现
4.1自主模式
编程环境:Arduino 1.8.19
下面提供一个实现暗光情况下灯叶打开,灯亮;强光情况下灯叶闭合,灯灭的参考程序(light.ino):
/*------------------------------------------------------------------------------------版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.Distributed under MIT license.See file LICENSE for detail or copy athttps://opensource.org/licenses/MITby 机器谱 2023-10-25 https://www.robotway.com/------------------------------*//** Light测试例程* 2018/04/17* ————————————* 接线:* 灯带:9、10* 舵机:4* 蓝牙:Bigfish扩展坞* 光强:A0* ————————————* 功能:* 控制模式:蓝牙控制灯叶开合* 自主模式:光强传感器控制灯叶开合* * 灯叶打开,灯亮;灯叶闭合,灯灭*/#include <ServoTimer2.h>#include "light.h"ServoTimer2 myServo;int servo_port = 4; //定义舵机引脚int sensor_port = A0; //定义光强传感器引脚int servo_value = 1550; //定义舵机初始值 PWM/*int open_angle = 1150; //灯叶打开时舵机的值int close_angle = 1550; //灯叶闭合时舵机的值*/void setup() {Serial.begin(9600);PortInit();myServo.write(servo_value);delay(1000);}void loop() {/*Bluetooth Mode*/ if(SerialRead() == '1'){Serial.println("Bluetooth Mode");while(true){switch(SerialRead()){case '2':Serial.println("OPEN");ServoGo(1150); //OPENbreak;case '3':Serial.println("CLOSE");ServoGo(1550); //CLOSEbreak;default:break;}if(SerialRead() == '4') {Serial.println("Auto Mode");break;}}}/* Auto Mode*/AutoMode(); }/*端口初始化*/void PortInit(){pinMode(sensor_port, INPUT);pinMode(servo_port, OUTPUT);pinMode(9, OUTPUT);pinMode(10, OUTPUT);digitalWrite(9, LOW);digitalWrite(10, LOW);myServo.attach(servo_port);}/*串口控制*/char SerialRead(){char c;while(Serial.available()) {c = Serial.read(); }return c;}/*自主模式*/void AutoMode(){if(digitalRead(sensor_port)){ //亮光下,光强返回值1,灯叶闭合,灯光关闭ServoGo(1550);}if(!digitalRead(sensor_port)){ //黑暗中,光强返回0,灯叶打开,灯光开启ServoGo(1150);}}/*舵机控制*/void ServoGo(int where){ //舵机控制函数,参数:目标角度int delta = where - servo_value; //delta < 0: OPEN ; delta > 0: CLOSEif(delta == 0) return;float light_value = delta < 0 ? 0 : 255; int diff = delta < 0 ? -1 : 1;for(int i=0;i<abs(delta);i++){servo_value += diff;if(delta < 0){light_value += 0.65; //0.65 (255 / delta);if(light_value > 255) light_value = 255;}else if(delta > 0){light_value -= 0.65;if(light_value < 0) light_value = 0;}LightState(&light_value); myServo.write(servo_value);delay(10); }}/*灯光控制*/void LightState(float * value){analogWrite(9, *value);analogWrite(10, 0);}4.2遥控模式
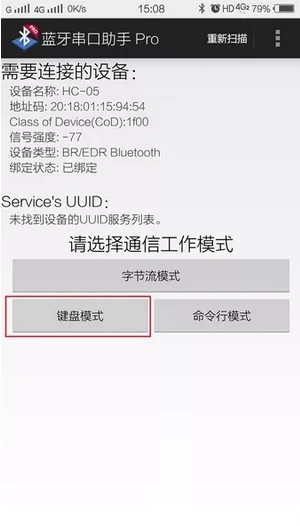
APP设置:将文末资料中的“BLE_SPP_PRO.apk”安装到手机中。
① 搜索蓝牙

② 连接蓝牙

③ 模式选择
④ 按键设置
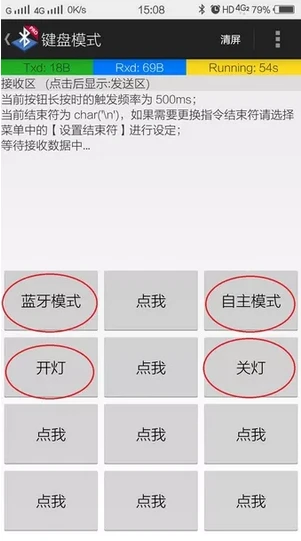
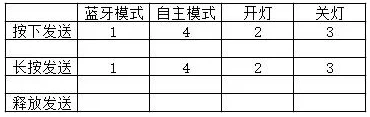
⑤ 各按键发送值
5. 资料清单
①程序源代码
②样机3D文件
资料下载链接:莲花灯-概述














:Routine Load数据导入演示)
![[SWPUCTF 2021 新生赛]非常简单的逻辑题 // %的逆向](http://pic.xiahunao.cn/[SWPUCTF 2021 新生赛]非常简单的逻辑题 // %的逆向)
)


