**单片机设计介绍, 基于单片机GPS轨迹定位和里程统计系统
文章目录
- 一 概要
- 二、功能设计
- 设计思路
- 三、 软件设计
- 原理图
- 五、 程序
- 六、 文章目录
一 概要
一个基于单片机、GPS和里程计的轨迹定位和里程统计系统可以被设计成能够在移动的交通工具中精确定位车辆的位置,并准确地测量车辆在行驶过程中的里程数。
该系统的主要组成部分包括:
-
单片机(如Arduino):作为系统的核心控制器,负责接收和处理GPS的数据、驱动里程计,并根据两种数据计算和更新车辆的位置和里程数。
-
GPS接收器:收集卫星信号并解码,将车辆的经度和纬度坐标传输到单片机。
-
里程计:可以是基于霍尔效应的轮速传感器或者是基于车辆发动机的速度传感器。里程计测量车轮的旋转,并传输数据给单片机,辅助计算车辆的里程数。
-
显示器:可用于显示车辆的位置信息和累积的里程数。
-
电源供应:提供系统所需的电能,可以是电池或者汽车电池。
在使用该系统时,GPS接收器和里程计将不断传输数据给单片机,单片机将计算得到车辆的位置和里程数,并将数据显示在显示器上。同时,用户也可以根据需要采集和记录保存数据以进行更深入的分析和应用。
通过这个系统,可以有效地掌握车辆的位置和里程数,为车辆管理和统计提供有力支持。
二、功能设计
GPS是全球定位系统英文名词Global PositioningSystem的缩写。该系统是美国布设的第二代卫星无线电导航系统。它能为用户提供全球性、全天候、连续、实时、高精度的三维坐标、三向速度和时间信息。其目的是在全球范围内对地面和空中目标进行准确定位和监测。现在,GPS接收机作为一种先进的导航和定位仪器,已在军事及民用领域得到广泛的应用。
设计思路
设计思路
文献研究法:搜集整理相关单片机系统相关研究资料,认真阅读文献,为研究做准备;
调查研究法:通过调查、分析、具体试用等方法,发现单片机系统的现状、存在问题和解决办法;
比较分析法:比较不同系统的具体原理,以及同一类传感器性能的区别,分析系统的研究现状与发展前景;
软硬件设计法:通过软硬件设计实现具体硬件实物,最后测试各项功能是否满足要求。

三、 软件设计
本系统原理图设计采用Altium Designer19,具体如图。在本科单片机设计中,设计电路使用的软件一般是Altium Designer或proteus,由于Altium Designer功能强大,可以设计硬件电路的原理图、PCB图,且界面简单,易操作,上手快。Altium Designer19是一款专业的整的端到端电子印刷电路板设计环境,用于电子印刷电路板设计。它结合了原理图设计、PCB设计、多种管理及仿真技术,能够很好的满足本次设计需求。
————————————————
仿真实现
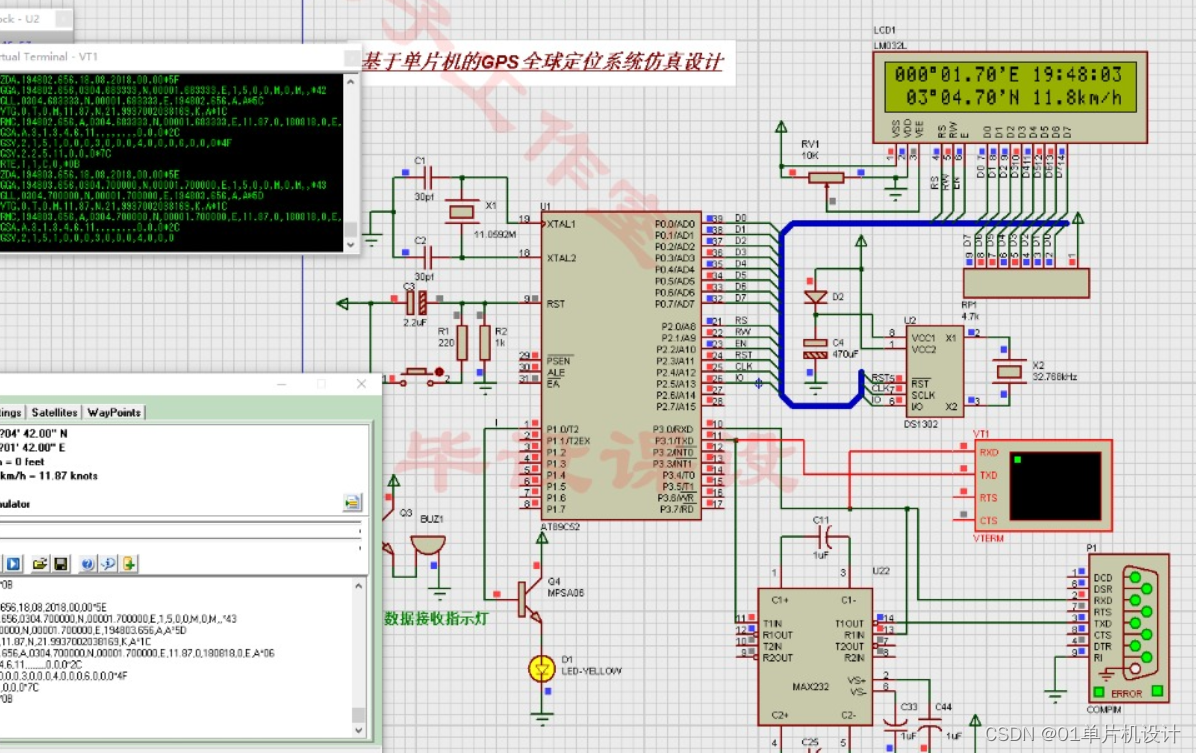
本设计利用protues8.7软件实现仿真设计,具体如图。
Protues也是在单片机仿真设计中常用的设计软件之一,通过设计出硬件电路图,及写入驱动程序,就能在不实现硬件的情况进行电路调试。另外,protues还能实现PCB的设计,在仿真中也可以与KEIL实现联调,便于程序的调试,且支持多种平台,使用简单便捷。
————————————————
原理图
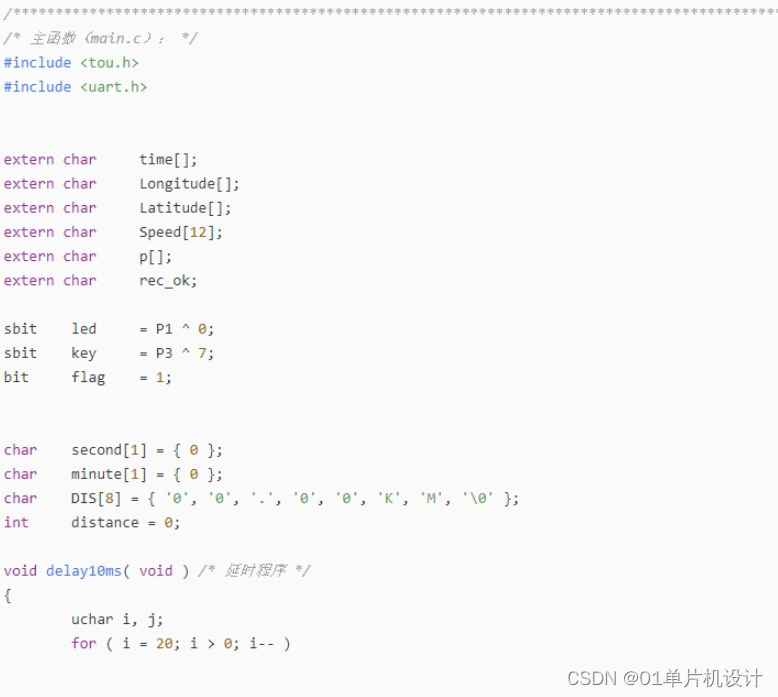
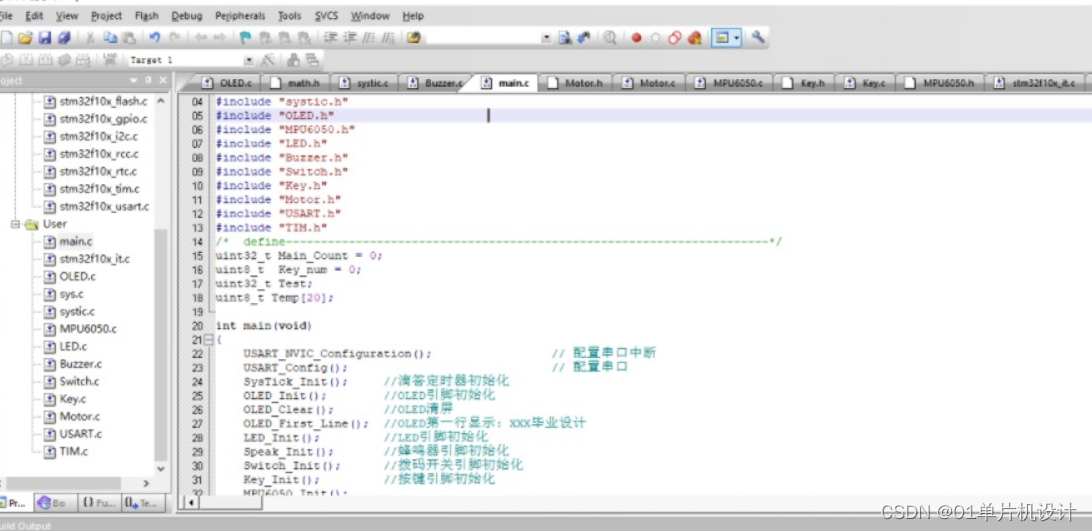
五、 程序
本设计利用KEIL5软件实现程序设计,具体如图。作为本科期间学习的第一门编程语言,C语言是我们最熟悉的编程语言之一。当然,由于其功能强大,C语言是当前世界上使用最广泛、最受欢迎的编程语言。在单片机设计中,C语言已经逐步完全取代汇编语言,因为相比于汇编语言,C语言编译与运行、调试十分方便,且可移植性高,可读性好,便于烧录与写入硬件系统,因此C语言被广泛应用在单片机设计中。keil软件由于其兼容单片机的设计,能够实现快速调试,并生成烧录文件,被广泛应用于C语言的编写和单片机的设计。
————————————————

六、 文章目录
目 录
摘 要 I
Abstract II
引 言 1
1 控制系统设计 2
1.1 主控系统方案设计 2
1.2 传感器方案设计 3
1.3 系统工作原理 5
2 硬件设计 6
2.1 主电路 6
2.1.1 单片机的选择 6
2.2 驱动电路 8
2.2.1 比较器的介绍 8
2.3放大电路 8
2.4最小系统 11
3 软件设计 13
3.1编程语言的选择 13
4 系统调试 16
4.1 系统硬件调试 16
4.2 系统软件调试 16
结 论 17
参考文献 18
附录1 总体原理图设计 20
附录2 源程序清单 21
致 谢 25





)










)
函数实现矩阵的加、减、点乘、点除等运算)
)
