一、BIM简介
(一)BIM概念
BIM(Building Information Modeling),建筑信息模型。该技术通过数字化手段,在计算机中建立虚拟建筑,该虚拟建筑提供从单一到完整、包含逻辑关系的建筑信息库。信息库中不仅包含建筑物的几何形状信息,还包含大量非几何信息,如材料的耐火等级、传热系数、构件的造价和采购信息等。其本质是一个按照建筑物几何形态构建的数据库,且记录各阶段的所有数据信息。BIM应用的精髓在于这些数据能贯穿项目的整个寿命期,对项目建造和后期运营管理持续发挥作用。
(二)BIM特性
BIM具有可视化、协调性、模拟性、优化性和可出图性五大特性,建筑公司可通过BIM在整个流程中进行项目规划和设计,还可通过建筑可视化来更好地沟通,以便让项目各方了解工期、现场实施情况、成本和环境影响等项目基本信息。
1. 可视化
在过去,施工图纸只是各个构件的信息,在图纸上以线条形式表达,效果图则是分包给专业的效果图制作团队,根据线条式信息识读并设计制作出来,缺少与构件之间的互动反馈。BIM的可视化是一种能同构件之间形成互动和反馈的可视化,重视通过建筑可视化在项目的设计、建造和营运过程中进行沟通、讨论和决策。
2. 协调性
施工过程会涉及很多专业部门,由于各专业设计师之间的沟通不到位,往往会出现各专业之间的碰撞问题。例如,在对暖通管道进行布置时,可能遇到构件阻碍管线的问题;电梯井的布置与其它设计布置冲突的问题;地下排水布置与其它设计布置不协调的问题。BIM建筑信息模型可在建筑物建造前期,对各专业的碰撞问题进行协调,生成并提供协调数据。
3. 模拟性
除了模拟建筑物,还可以模拟难以在真实世界中进行操作的事件。在设计阶段,BIM可以进行节能模拟、紧急疏散模拟、日照模拟、热能传导模拟等;在招投标和施工阶段,BIM可以进行4D模拟(3D模型+项目发展时间)和5D模拟(增加造价控制);在后期运营阶段,可以进行紧急情况处理方式的模拟等。
4. 优化性
BIM模型提供了建筑物的几何信息、物理信息、规则信息,对于高度复杂的项目,工作人员无法掌握所有信息,因此需要借助一定的软件算法。BIM及其配套的各种优化工具提供了对复杂项目进行优化的途径。
5. 可出图性
BIM模型可导出经过协调、优化后的各类传统的设计图,可绘制出综合管线图、综合结构留洞图、碰撞检查侦错报告、改进建议等。
二、建筑机器人
建筑机器人包括施工现场代替人工的喷涂机器人、焊接机器人、砌墙机器人、墙/地面施工机器人、清拆/清运作业机器人、3D打印建筑机器人、装修建筑机器人、维护建筑机器人、救援建筑机器人等,以及在工厂内进行装配的机器人。
(一)建筑机器人发展简史
1982年,日本清水公司开发的耐火材料喷涂机器人被认为是第一台建筑施工机器人,可修平和磨光楼板表面,并自动躲避墙壁和立柱。
1994年,德国制造了墙体砌筑机器人,1996年制造了混凝土施工机器人。
2014年,新加坡开发了地瓷砖铺设机器人。
2022年,瑞士建筑工具制造商Hilti退出一款BIM驱动的建筑工地机器人Jaibot,这是一款进行天花板钻孔应用的半自主机器人。
我国建筑机器人研究起步晚,发展快。如哈工大制造的遥控壁面爬行机器人、山东矿大制造的喷浆机器人、河北工大开发的室内板材安装机器人等都已在建筑施工现场得到应用。
碧桂园旗下博智林公司自研建造全周期多类型建筑机器人,系统化提升安全、质量、效益等建造全过程综合效益。
(二)建筑机器人研发途径
目前,建筑机器人的研发主要包括三条途径:
第一条途径是对现有机械改造。对于广泛使用的挖掘机、推土机、压路机、渣土车等机械进行改造,实现远程遥控操作、自主导航、无人驾驶等,这是建筑施工智能化的一条捷径。
第二条途径是对已有机器人的应用。目前研发的很多机器人属于通用技术,例如环境感知与建模方面,可利用无人机(UAV)、轮式/履带机器人等移动平台搭载激光雷达、结构光摄像头、3D视觉等环境感知设备,基于多源信息融合、SLAM等环境建模技术,实现3D建模;利用UAV配合SLAM技术实现土方开挖、废料清运、结构物施工进度及工程量的实时监测和优化协调;基于机械臂、移动机器人底盘搭建移动操作平台,有望替代人工完成诸如砌筑、抹灰、平整、抛光、编制、铺贴、钻孔等多种操作。
第三条途径是推动专业建筑机器人的研发,这是未来发展方向。建筑业有其特殊性,通用技术无法解决所有问题。为了能够更好地实施营建,根据建筑业特性研发专用建筑机器人极其必要。例如,3D打印机器人的轮廓成型工艺,需要针对房屋施工的各种特殊需求进行改进,才形成能直接打印包括水电管线在内的完整房屋3D打印能力;喷浆机器人、ERO混凝土回收机器人等也是针对建筑业特殊需要定制研发的。
(三)典型的建筑机器人
1. 3D打印建造机器人
3D打印建筑一般分为两种方式,一种是模块化打印再拼装,指通过3D打印机制作独立的单元,并在工厂中对模块内部进行装修布置,再运输到现场,通过吊装将模块连接为建筑整体。另一种被称为原位打印,直接用3D打印机器人在现场施工。
原位打印又分为两种,一种是通过龙门吊式的3D混凝土打印机,另一种是通过改装传统的机械臂做同样的事情。


2. ERO混凝土回收机器人
可以如同橡皮擦擦掉笔迹一样,擦除混凝土结构,回收钢材。其原理是用高压水枪冲击混凝土表面,解决了混凝土结构拆除工作中的噪音问题、环境污染问题、垃圾回收问题、材料分类回收问题等。

3. 外骨骼搬运机器人
建筑工作涉及很多可能导致伤害的任务,搬运重物是造成施工中拉伤的主要原因。建筑外骨骼可以直接解决这些问题,使用外骨骼可以降低脊柱的压力,减少疲劳等。

4. 破拆机器人
破拆机器人是一种专门设计用于拆除、破碎工作的工程机械产品。它们被广泛应用于建筑隧道、回转窑、矿山、水泥、冶金、核工业等领域,以提供高效、安全和精确的拆除解决方案。它们可以在高温高粉尘高危环境下工作,让人员可以原理危险有害区域,提高效率,降低成本。

5. 钢筋绑扎机器人
钢筋绑扎是钢筋工程现场施工的重要步骤,该工序目的在于固定钢筋位置,确保钢筋间距符合设计要求。此项工序通常由人工在现场完成,钢筋绑扎工作量大、需要人工数量多、耗时长,智能钢筋绑扎机器人将改变现状。

6. 墙板安装机器人
墙板安装机器人具备视觉、距离、重力等感知能力,可实现墙板安装过程中的抓取、举升、转动、行走、对位、挤浆自动化。墙板安装机器人能实时提取墙板所在位置,通过内置算法,自动调整板材位置,实现墙板自动安装。

三、工程施工中的关键技术
(一)锚固支护技术
锚杆支护是通过围岩内部的锚杆改变围岩本身的力学状态,在巷道周围形成一个整体而又稳定的岩石带,利用锚杆与围岩共同作用,达到维护巷道稳定的目的。锚杆的力学作用主要有悬吊作用 、组合梁作用 、组合拱作用、减跨作用 、加固作用等。锚杆不但支护效果好,且用料省、施工简单、有利于机械化操作、施工速度快。但是锚杆不能封闭围岩,防止围岩风化;不能防止各锚杆之间裂隙岩石的剥落。
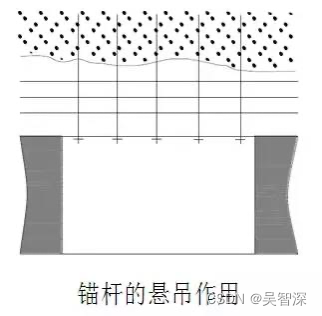
1. 锚杆的悬吊作用
悬吊作用是指用锚杆将软弱的直接顶板吊挂在其上的坚固老顶之上,如下图所示。或者是用锚杆将因巷道开挖而引起松动的岩块连接在松动区外的完整坚固岩石上,使松动岩块不至冒落。
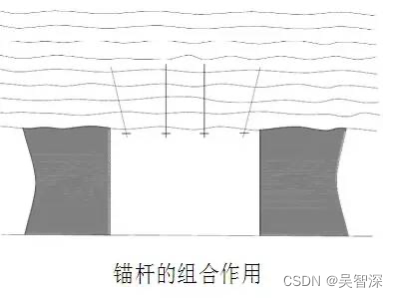
2. 锚杆的组合梁理论
利用锚杆的拉力将层状岩层组合起来形成组合梁结构进行支护,这就是锚杆组合梁作用。组合梁作用的本质在于通过锚杆的预拉应力将原视为叠合梁的岩层挤紧,增大岩层间的摩擦力;同时,锚杆本身也提供一定的抗剪能力,阻止其层间错动。锚杆把数层薄的岩层组合成类似铆钉加固的组合梁,这时被锚固的岩层便可看成组合梁,全部锚固层能保持同步变形,顶板岩层抗弯刚度得以大大提高。
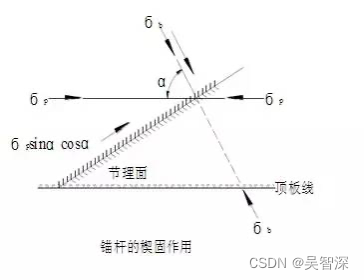
3. 锚杆的楔固作用
矿井岩层的水平应力一般是垂直应力1. 3~2. 0倍。而且水平应力具有方向性,最大水平应力一般为最小水平应力的1. 5~2. 5倍。在最大水平应力作用下,巷道顶底板岩层发生剪切破坏,因而会出现错动与松动引起层间膨胀,造成围岩变形。锚杆所起的作用是约束其沿轴向岩层膨胀和垂直于轴向的岩层剪切错动,因此要求具备有强度大、刚度大、抗剪阻力大的高强锚杆支护系统。
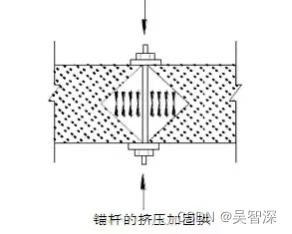
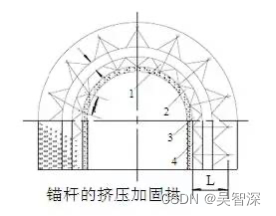
4. 锚杆的挤压加固拱作用
形成以锚杆头和紧固端为顶点的锥形体压缩区。如将锚杆沿拱形巷道周边按一定间距径向排列,在预应力作用下,每根锚杆周围形成的锥形体压缩区彼此重叠联结,在围岩中形成一连续压缩带。它不仅能保持自身的稳定,而且能承受地压,阻止上部围岩的松动和变形。
5. 锚杆的减跨作用
如果把不稳定的顶板岩层看成是支撑在两边的叠合梁,可将悬吊在老顶上的锚杆视为支点,安设了锚杆就相当于在该处打了点柱增加了支点、减少了顶板的跨度,从而降低了顶板岩层的弯曲应力和挠度,维持了顶板与岩石的稳定性,使岩石不易变形和破坏。这就是锚杆的“减跨”作用,它实际上来源于锚杆的悬吊作用。
上述几种锚杆支护作用并非是孤立存在的,实际上是相互补充的综合作用,只不过在不同地质条件下,某种支护作用占的地位不同而已。
(二)隧道衬砌
隧道开挖后,坑道周围地层原有平衡遭到破坏,引起坑道变形或崩塌。为了保护围岩的稳定性,确保行车安全,隧道必须有足够强度的支护结构即隧道衬砌。隧道衬砌是为了防止围岩变形或坍塌,沿隧道洞身周边用钢筋混凝土等材料修建的永久性支护结构。
1. 衬砌方法
在不同的围岩中可采用不同的衬砌形式。常用的衬砌形式有喷混凝土衬砌、喷锚衬砌及复合式衬砌,多数情况下采用复合式衬砌。复合式衬砌常分为一次衬砌和二次衬砌。
一次衬砌是在进行暗挖施工时的一项施工保护措施。隧道开挖后,为控制围岩应力适量释放和形变,增加结构安全度和方便施工,隧道开挖后立即施作刚度较小并作为永久承载结构一部分的结构层,一般有喷射混凝土、喷射混凝土加锚杆、喷射混凝土锚杆与钢架联合支护等形式。
二次衬砌是隧道工程施工在一次衬砌内侧施作的模筑混凝土或钢筋混凝土衬砌。二次衬砌可以加固支护、优化路线防排水系统、美化外观、方便设置通迅、照明、监测等设施的作用,以适应现代化高速道路隧道建设的要求。
衬砌的方法包括整体式模筑混凝土衬砌和装配式衬砌。
整体式模筑混凝土衬砌即就地灌筑混凝土,这种方式的优点是他对地质条件的适应性较强,很多地质都使用,可以按需成型,整体性好,抗渗透性强,并且在各种施工条件下都适用。在我国的隧道工程中,整体式模筑混凝土衬砌的应用十分广泛。
装配式衬砌是指将工厂或现场预制备好的构件运入坑道内,用机械拼装而成的衬砌。这种方式的优点是拼装成环后马上就能受力,机械化施工方便快捷,性价比高。目前国内隧道工程还没有广泛使用该方法,但地铁已经被推广了。
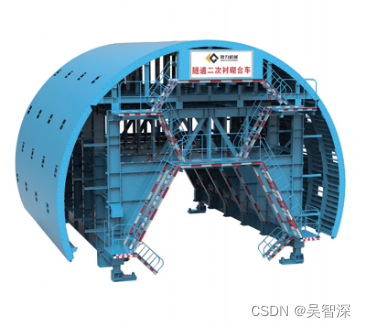
2. 衬砌台车
隧道衬砌台车是隧道施工过程二次衬砌中必须使用的专用设备,用于对隧道内壁的砼衬砌施工。砼衬砌台车是隧道施工过程中二次衬砌不可或缺的非标产品,主要有简易衬砌台车、全液压自动行走衬砌台车和网架式衬砌台车。全液压衬砌台车又可分为边顶拱式、全圆针梁式、底模针梁式、全圆穿行式等。全圆式衬砌台车常用于水工隧道施工中,不允许隧道有砼施工纵向接缝,在水工隧道跨度较大时一般使用全圆穿行式;边顶拱式衬砌台车应用最为普遍,常用于公路、铁路隧道及地下洞室的砼二次衬砌施工 。
3. 凿岩台车
凿岩台车(也称钻孔台车)是一种隧道及地下工程采用钻爆法施工的凿岩设备。它能移动并支持多台凿岩机同时进行钻眼作业。工作机构主要由推进器、钻臂、回转机构、平移机构组成。凿岩台车可分为平巷掘进钻车、采矿钻车、锚杆钻车和露天开采用凿岩钻车等。按照钻车的行走机构可分为轨轮、轮胎和履带式;按照架设凿岩机台数可分为单机、双机和多机钻车。





)


)











