导读:异步电机直接矢量控制需要通过磁链观测器来获取同步角,用于控制过程中的坐标变换。同时,磁链观测器输出的估计磁链用于磁链PI调节器闭环控制。所以磁链观测器在矢量控制中显得尤为重要。
如果需要文章中对应的仿真模型,关注微信公众号:浅谈电机控制,留言获取。
一、矢量控制FOC

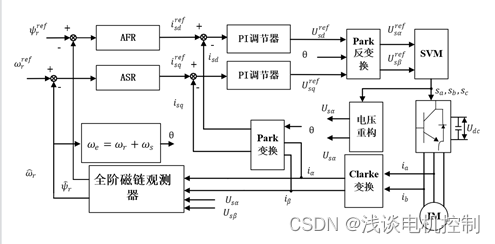
图1-1 异步电机转子磁场定向矢量控制框图
二、全阶磁链观测器

图2-1全阶磁链观测器系统结构框图
全阶磁链观测器的主要思想是将感应电机模型作为参考,把状态估计的方程作为可调节部分。这两部分具有相同物理意义的输出量,利用两个部分的输出量误差再经过反馈校正通道对状态观测值进行修正,使观测值快速地跟踪上实际值。模型参考自适应系统的(Model Reference Adaptive System,MRAS)思想有效地提高了全阶磁链观测器的动态性能和抗扰动性能。
参考异步电机状态方程,全阶磁链观测器模型可以表示为:

三、仿真建模与波形分析
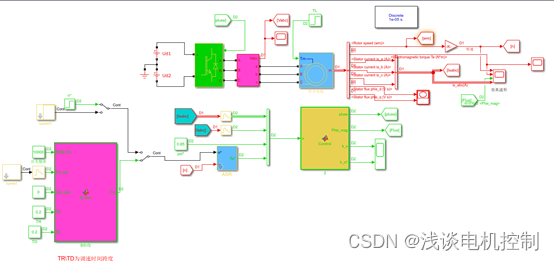
图3-1 基于全阶模型磁链观测器的FOC控制仿真系统
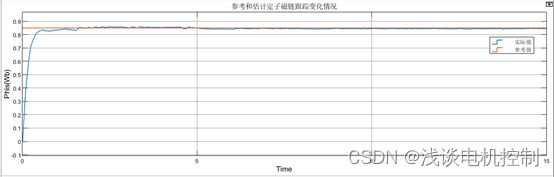
(a)150r/min

(b)1500r/min
图3-2 不同转速下的估计磁链变换情况

图3-3 基于全阶模型磁链观测器的异步电机FOC控制系统仿真波形(1500r/min)
从图(3-1)和(3-2)可知,全阶磁链观测器在低速和高速区域,实际值都能很好地跟踪上参考值。
四、总结
全阶磁链观测器属于一种闭环磁链观测器,根据MRAS进行误差反馈修正估计值,动态和稳态性能有所提高。全阶磁链观测器的重点在于离散化方法和反馈矩阵的设计,可以保证在全速范围内具有一定的磁链估计精度。


)


)













