激光雷达在提高自动驾驶的安全性方面具有重要作用。它通过高精度测量、避免误判、实时感知、适应不同环境和结合其他传感器等方式,为自动驾驶系统提供准确、可靠的感知数据,从而确保行驶的安全性和稳定性。
激光雷达可以通过以下方式避免误判:
- 高精度测量:激光雷达可以高精度地测量周围物体的距离、位置和形状,从而更准确地感知周围环境。这有助于避免将非障碍物误判为障碍物,例如将道路上的坑洼或凸起误判为车辆等。
- 多传感器融合:激光雷达通常与其他传感器(如摄像头、雷达和惯性测量单元)相结合使用,形成多传感器融合的系统。这种系统能够全方位地感知周围环境,提高感知的准确性和可靠性。通过多个传感器的数据融合,可以减少误判的可能性。
- 目标识别:激光雷达可以通过目标识别技术来识别不同类型的目标,如车辆、行人、道路标志等。通过识别目标的不同特征,如形状、大小、运动轨迹等,可以更准确地判断目标的属性,避免误判。
- 环境建模:激光雷达可以通过环境建模技术,建立车辆周围的3D环境模型。通过模型比对和分析,可以更准确地判断目标的属性,避免误判。
- 数据过滤:激光雷达可以通过数据过滤技术,对获取的点云数据进行过滤和筛选,去除噪声和干扰数据。这有助于减少误判的可能性,提高感知的准确性和可靠性。
- 经验积累和学习:激光雷达可以通过机器学习等技术,对历史数据和经验进行学习和积累。通过不断优化算法和模型,可以提高感知的准确性和可靠性,减少误判的可能性。
总之,激光雷达通过高精度测量、多传感器融合、目标识别、环境建模、数据过滤和经验积累和学习等方式,可以避免误判,提高感知的准确性和可靠性。
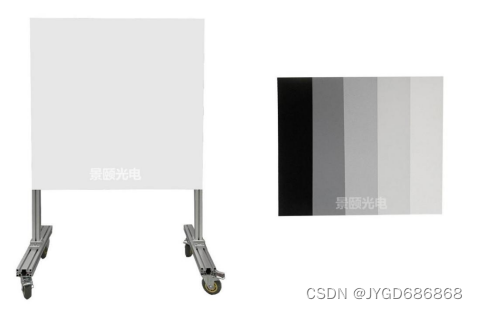
景颐光电激光雷达标定板可用于激光雷达的目标距离校准,让激光雷达更精准地判断周围故障物及其运动轨迹。常用于激光雷达定标的反射率有10%、50%和80%,如果定标精度要求比较高,还可定制更多的阶梯反射率。景颐光电漫反射标准板反射率可从1-99%可选,可定制0.05m-3m或以上的不同漫反射板尺寸和形状,均具有近完美的朗伯特性和稳定性,让激光雷达标定得到最优的测试效果。





常用方法简介【C++的OpenCV 第十五课】)
的刷盘策略)



:权限控制与数据隔离)





)


