看了看以前的代码,有一小段代码很有意思,是关于pcl点云处理的。
如有帮助,点赞收藏关注!!!
读取点云数据,想可视化点云数据,并根据选择,实时显示点云的空间坐标数值。
接下来的代码基于c++ pcl 1.8.1 实现。
点击点云显示值 <显示点云pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("viewer"));viewer->addPointCloud(graycloudC, "cloud");viewer->setCameraPosition(0, 0, -2, 0, -1, 0, 0);// 添加点拾取回调函数CallbackArgs cb_args;PointCloudT::Ptr clicked_points_3d(new PointCloudT);cb_args.clicked_points_3d = clicked_points_3d;cb_args.viewerPtr = pcl::visualization::PCLVisualizer::Ptr(viewer);viewer->registerPointPickingCallback(pickPointCallback, (void*)&cb_args);//按住shift键 + 点击鼠标,可成功选择点云。//如果选择不上那就滚动滚轮缩小点云体积,如果还是选择不上,emm那就多尝试两次。std::cout << "Shift+click on three floor points, then press 'Q'..." << std::endl;viewer->spin();while (!viewer->wasStopped()){viewer->spinOnce(100);}
效果示例如下:
红点即为我选择的点云点,XYZ坐标为:-110.987,-21.7817, 943
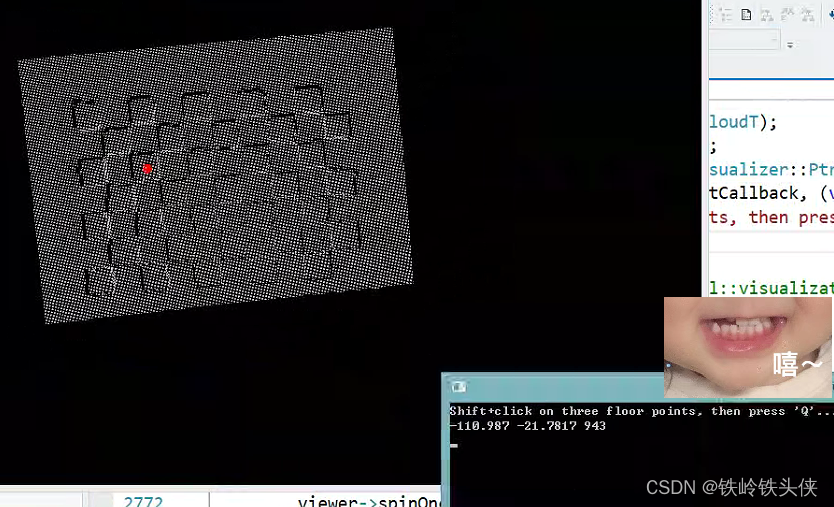
本次示例只选择并显示一个点云点,但点云界面没有关闭时可以一直选取点读数。每次只红色高亮一个点并报一组xyz。
操作完成后,可以关闭点云界面弹窗。代码即可向下继续运行。
如有帮助,点赞收藏关注!!!
管理)




![[已解决]虚拟机之前能正常上网,重启之后无法连接网络问题的解决方法](http://pic.xiahunao.cn/[已解决]虚拟机之前能正常上网,重启之后无法连接网络问题的解决方法)





)
)

--- Pinia状态管理器)




