👉博__主👈:米码收割机
👉技__能👈:C++/Python语言
👉公众号👈:测试开发自动化【获取源码+商业合作】
👉荣__誉👈:阿里云博客专家博主、51CTO技术博主
👉专__注👈:专注主流机器人、人工智能等相关领域的开发、测试技术。
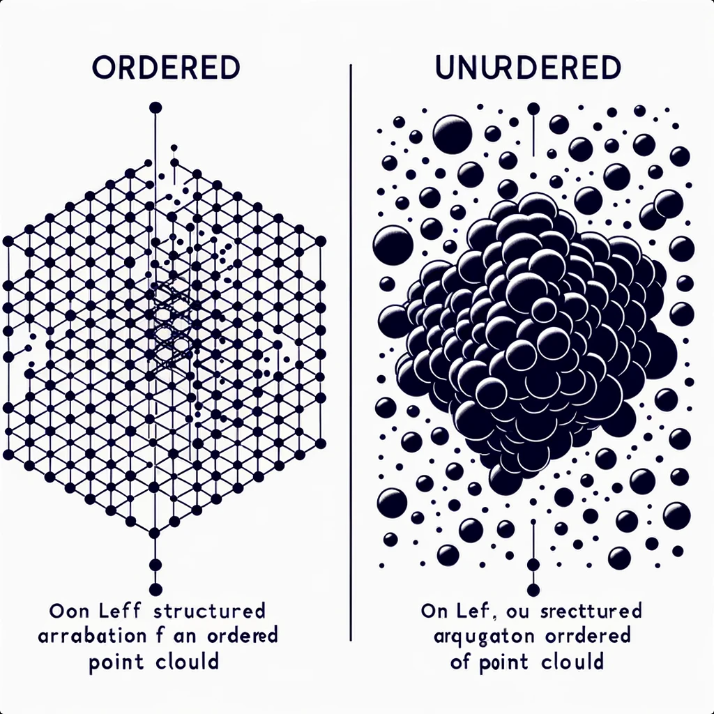
有序/无序点云区别(详细详解)
目录
- 有序/无序点云区别(详细详解)
- 有序点云
- 无序点云
- 误区扫盲
有序点云
● 一般由深度图还原的点云,有序点云按照图方阵一行一行的,从左上角到右下角排列,当然其中有一些无效点。
● 有序点云按顺序排列,可以很容易的找到它的相邻点信息(邻近搜索)。
● 如果某些点数据丢失或无效,通常会被标记为“NaN”或其他标识符。
无序点云
● 点的集合,点排列之间没有任何顺序,只是空间中的一组点,点的顺序交换后没有任何影响。
● 点的位置是基于其在物理空间中的实际位置,而不是在某种预定义的网格或数组中的位置。
误区扫盲
从视觉上看,有序点云和无序点云可能看起来非常相似,特别是当它们表示相同的物体或场景时。关键的区别在于它们的数据结构和生成方式,而不仅仅是它们的外观。
点云的有序性或无序性与其颜色无关。有序性和无序性描述的是点云数据的结构和组织方式。而颜色是点云的一个额外属性,可以独立于点云的结构存在。







)
)

)




)
)


