目录
背景:
一、配置 turtlebot3
二、安装RTAB-Map ROS2包:
三、启动 Turtlebot3 模拟器:
四、启动 RTAB 地图:
背景:
1、设备:pc;旭日派x3(后续会加上,目前只有pc)
2、环境:Ubuntu20.04;ROS2(Foxy)
一、配置 turtlebot3
turtlebot3缺什么东西参考地平线文档5.2. Nav2 — 地平线机器人平台用户手册 1.0 文档
二、安装RTAB-Map ROS2包:
-
cd ~/ros2_ws git clone https://github.com/introlab/rtabmap.git src/rtabmap git clone --branch ros2 https://github.com/introlab/rtabmap_ros.git src/rtabmap_ros rosdep update && rosdep install --from-paths src --ignore-src -r -y export MAKEFLAGS="-j6" # Can be ignored if you have a lot of RAM (>16GB) #但是这个地方我设置的2 colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release解析:export MAKEFLAGS="-j6" 这句命令是设置环境变量`MAKEFLAGS`的值为`"-j6"`。它通常用于告诉编译工具`make`在编译过程中使用多个并行工作线程(也称为"jobs")。具体来说:- `"-j6"` 中的 `-j` 参数告诉 `make` 启动多少个并行工作线程来执行编译任务。在这里,`6` 意味着同时启动 6 个并行工作线程。这可以显著加快编译过程,特别是在具有多个处理器核心的计算机上。- 注释 `# Can be ignored if you have a lot of RAM (>16GB)` 是对命令的一个注释,它建议如果你的计算机具有大于16GB的RAM内存,那么可以忽略这个设置,因为RAM较大的计算机通常更能容纳并行编译所需的内存。在内存受限的系统上,使用太多并行工作线程可能导致内存不足的问题,因此可以根据系统资源来决定是否设置 `-j` 参数。总之,这个命令是用来控制编译工具在编译过程中使用多少并行工作线程,以加快编译速度。根据你的计算机硬件和内存情况,你可以选择是否使用这个设置以及设置多少个并行工作线程。
-
注:我在build时候一直不成功,显示缺少东西,解决方法:
-
sudo apt remove ros-foxy-rtabmap*一直build,直至成功。
-
三、启动 Turtlebot3 模拟器:
-
export TURTLEBOT3_MODEL=waffle ros2 launch turtlebot3_gazebo turtlebot3_world.launch.pyexport TURTLEBOT3_MODEL=waffle ros2 run turtlebot3_teleop teleop_keyboard四、启动 RTAB 地图:
-
ros2 launch rtabmap_demos turtlebot3_scan.launch.py -
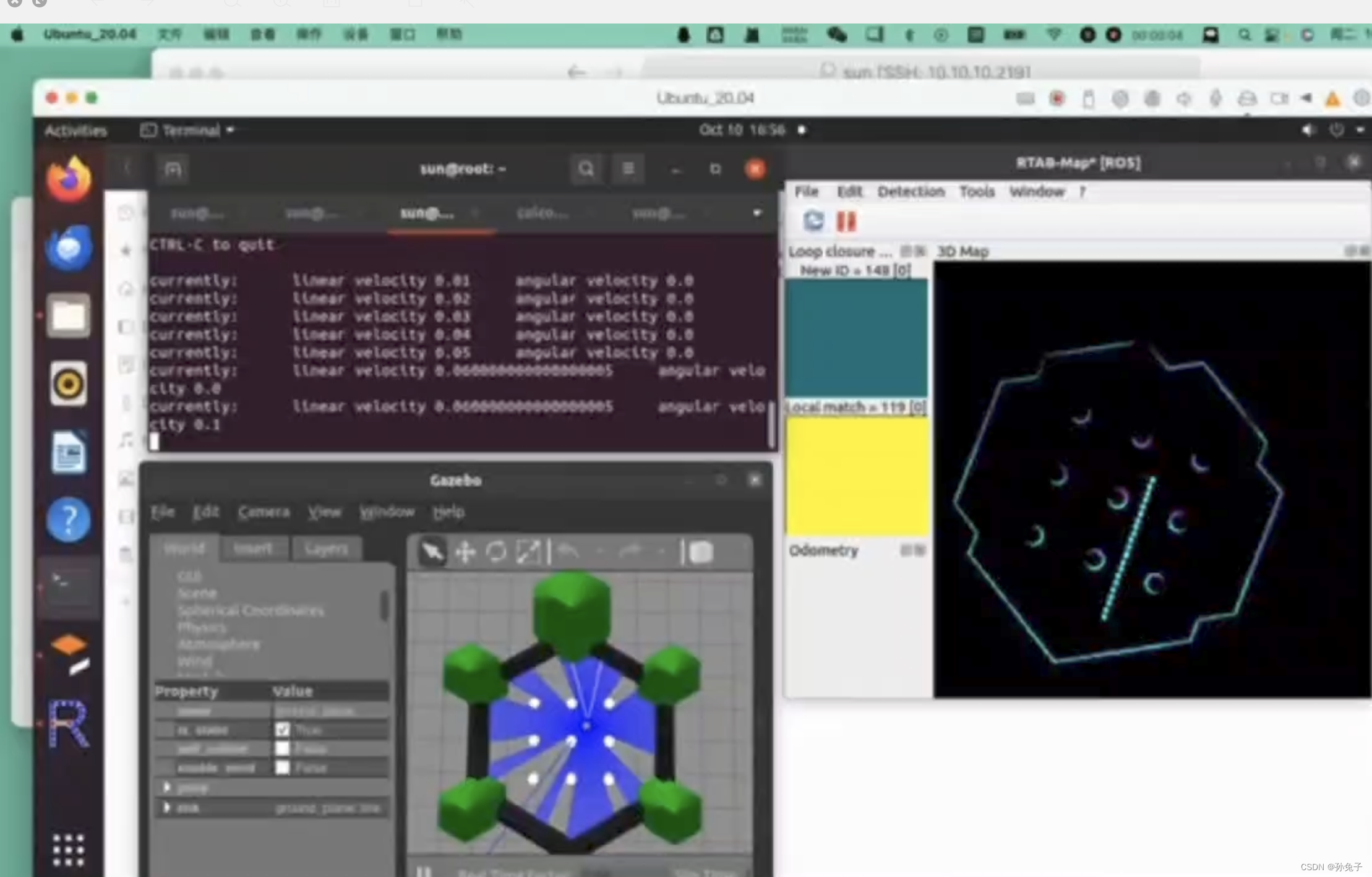
rtab_map
五、启动导航(
nav2_bringup应安装软件包): -
ros2 launch nav2_bringup navigation_launch.py use_sim_time:=True ros2 launch nav2_bringup rviz_launch.py
后续会接入虚拟摄像头进行测试





)


)

)

)
)

)


)
