马拉松比赛对人形机器人来说,是一场对硬件极限的测试,涉及机械、传感器、能源管理等多个方面。用户问的是硬件方面的考察和改进,这意味着我的回答需要聚焦于硬件性能,而不是算法或软件的优化。
对人形机器人硬件的考研
-
机械结构与关节性能 :机器人马拉松要求机器人具备 highly flexible and stable 的机械结构。像波士顿动力的 Atlas 机器人,其内部构造复杂,需要在长时间奔跑过程中承受反复的冲击和震动,对关节的强度、稳定性和灵活性考验极大,任何一个关节的松动或失效都可能导致整个机器人失去平衡或无法正常运动。
-
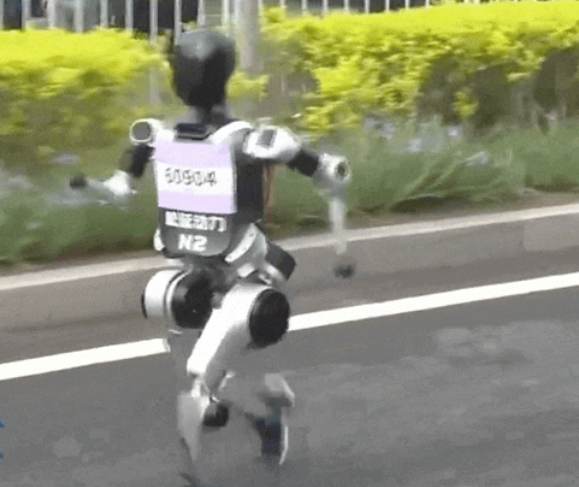
动力系统与能源供应 :长时间的马拉松运动需要机器人有高效且持久的动力系统。以宇树科技的人形机器人为例,其在奔跑时需依靠电池提供持续能量,且电机等动力部件需高效地将电能转化为机械能,以保证机器人能够以一定速度完成 21 公里左右的赛程,对能源的利用效率和动力输出的稳定性要求很高。
-
感知与控制系统 :机器人需要敏锐的感知系统来实时监测周围环境,包括路况、障碍物等,同时要有精准的控制系统来调整自身的运动姿态和步伐。如在复杂的马拉松赛道上,机器人要通过摄像头、激光雷达等多种传感器获取环境信息,并迅速作出反应,控制关节和电机进行相应的动作调整,以保持平衡和稳定。
-
材料的耐久性与可靠性 :在马拉松过程中,机器人的各个部件会受到不同程度的磨损和应力,所使用的材料需要具备良好的耐久性和可靠性。如机器人的外壳材料要能抵御外界的刮擦和碰撞,内部的电子元件和机械部件材料要能在长时间运行过程中保持性能稳定,不出现故障。
需提高的硬件方面
-
高扭矩与高功率密度电机 :目前,人形机器人在高扭矩输出和高功率密度方面仍有提升空间。研发更高性能的电机,能够使机器人在奔跑过程中更轻松地应对各种路况,减少因动力不足而导致的速度下降或摔倒等情况,同时也有助于减轻机器人的整体重量,提高其运动效率。
-
高效能源存储与管理技术 :虽然现有的电池技术已有一定发展,但对于机器人马拉松这样长时间、高能耗的活动,仍需进一步提高能源存储密度和能源管理效率。开发新型电池材料或采用更先进的能源存储系统,以及优化能源管理系统,实现对电池能量的精准分配和有效利用,可延长机器人的续航里程,增强其在马拉松中的竞争力。
-
高精度与高响应速度的传感器 :为了更准确地感知环境和自身状态,机器人需要配备高精度、高响应速度的传感器。例如,改进摄像头的分辨率和帧率,提高激光雷达的测距精度和扫描速度,以及增强惯性测量单元的灵敏度等,从而为机器人的控制系统提供更丰富、更及时的环境信息,使其能够更迅速地做出准确的决策和动作调整。
-
轻量化与高强度的材料研发 :寻找更轻量化且具有更高强度和更好耐磨性的材料,用于制造机器人的机身、关节等关键部件,对于提升机器人的性能至关重要。新型材料的应用不仅可以减轻机器人的重量,降低其运动负担,还能增强机器人的耐用性,减少维修成本和因材料损坏导致的故障风险,使其能够更好地适应机器人马拉松这样的高强度运动场景。

![[论文阅读]ConfusedPilot: Confused Deputy Risks in RAG-based LLMs](http://pic.xiahunao.cn/[论文阅读]ConfusedPilot: Confused Deputy Risks in RAG-based LLMs)
)





)










)