- 操作系统:ubuntu22.04
- OpenCV版本:OpenCV4.9
- IDE:Visual Studio Code
- 编程语言:C++11
算法描述
cv::gapi::Sobel 函数是 OpenCV 的 G-API 模块中用于执行 Sobel 算子操作的一个函数,主要用于图像的边缘检测。Sobel 算子通过计算图像强度的梯度来工作,它使用一个内核在水平方向(dx)和垂直方向(dy)上进行卷积运算。
使用扩展的 Sobel 算子计算一阶、二阶、三阶或混合图像导数。
除了一个特殊情况外,在所有情况下,都会使用 ksize×ksize 可分离核来计算导数。当 ksize = 1 时,使用 3×1 或 1×3 核(即,不进行高斯平滑)。ksize = 1 仅可用于计算一阶或二阶 x- 或 y- 导数。
还有一个特殊的值 ksize = FILTER_SCHARR (-1),对应于 3×3 Scharr 滤波器,它可能比 3×3 Sobel 滤波器提供更准确的结果。Scharr 孔径为
[ − 3 0 3 − 10 0 10 − 3 0 3 ] \begin{bmatrix} -3 & 0 & 3 \\ -10 & 0 & 10 \\ -3 & 0 & 3 \end{bmatrix} −3−10−30003103
用于 x 导数,或者转置后用于 y 导数。
该函数通过将图像与适当的核卷积来计算图像导数:
dst = ∂ x o r d e r + y o r d e r src ∂ x x o r d e r ∂ y y o r d e r \texttt{dst} = \frac{\partial^{xorder+yorder} \texttt{src}}{\partial x^{xorder} \partial y^{yorder}} dst=∂xxorder∂yyorder∂xorder+yordersrc
Sobel 算子结合了高斯平滑和微分,因此结果对噪声具有某种程度的抵抗性。通常,该函数被调用为 ( xorder = 1, yorder = 0, ksize = 3) 或 ( xorder = 0, yorder = 1, ksize = 3),以计算一阶 x 或 y 图像导数。第一种情况对应于以下核:
Sobel x = [ − 1 0 1 − 2 0 2 − 1 0 1 ] \text{Sobel}_x = \begin{bmatrix} -1 & 0 & 1 \\ -2 & 0 & 2 \\ -1 & 0 & 1 \end{bmatrix} Sobelx= −1−2−1000121
第二种情况对应于以下核:
[ − 1 − 2 − 1 0 0 0 1 2 1 ] \begin{bmatrix} -1 & -2 & -1 \\ 0 & 0 & 0 \\ 1 & 2 & 1 \end{bmatrix} −101−202−101
函数原型
GMat cv::gapi::Sobel
(const GMat & src,int ddepth,int dx,int dy,int ksize = 3,double scale = 1,double delta = 0,int borderType = BORDER_DEFAULT,const Scalar & borderValue = Scalar(0)
)
注意:
如果硬件支持,则会进行向最近偶数的舍入;如果不支持,则舍入到最近。
函数文本ID是 “org.opencv.imgproc.filters.sobel”
参数
- 参数 src: 输入图像。
- 参数 ddepth: 输出图像深度,参见组合;对于8位输入图像,导数可能会被截断。
- 参数 dx: x方向导数的阶数。
- 参数 dy: y方向导数的阶数。
- 参数 ksize: 扩展 Sobel 核的大小;必须为奇数。
- 参数 scale: 计算导数值的可选比例因子;默认情况下,不应用缩放(详情参见 cv::getDerivKernels)。
- 参数 delta: 在存储到 dst 前添加到结果中的可选增量值。
- 参数borderType: 像素外推方法,参见 cv::BorderTypes。
- 参数 borderValue: 在常量边界类型的情况下的边界值。
代码示例
#include <opencv2/gapi/gkernel.hpp>
#include <opencv2/gapi/imgproc.hpp>
#include <opencv2/opencv.hpp>int main()
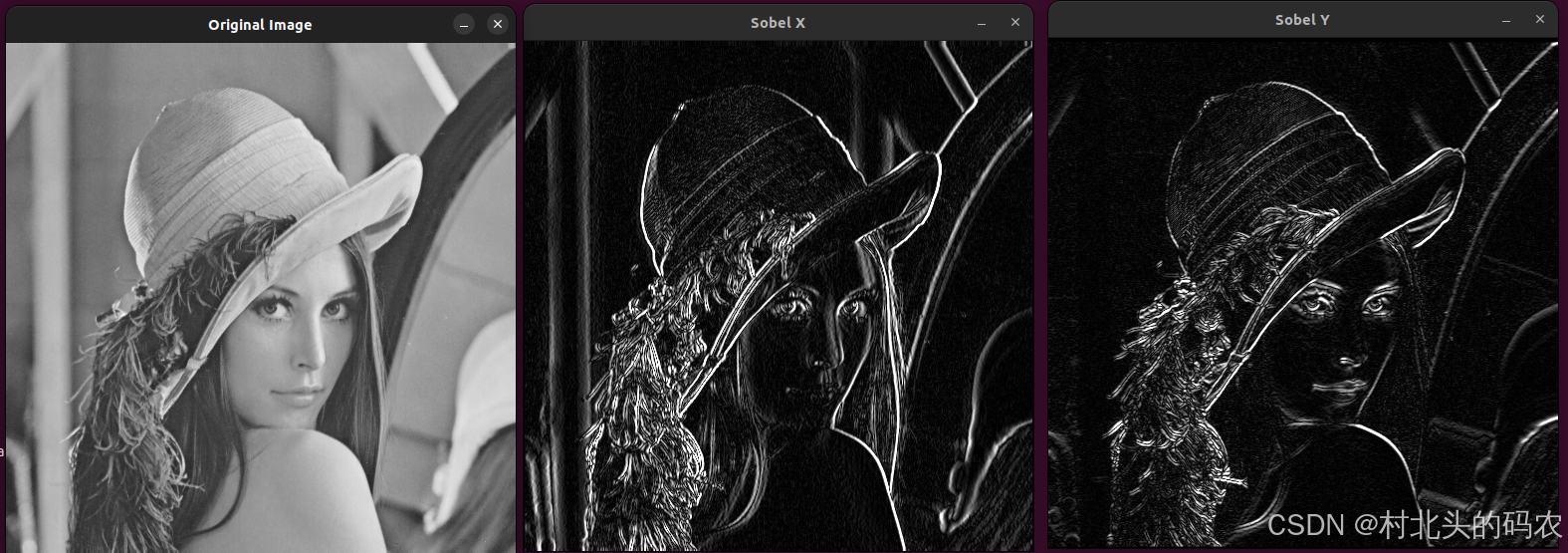
{// 读取输入图像cv::Mat src = cv::imread( "/media/dingxin/data/study/OpenCV/sources/images/Lenna.png", cv::IMREAD_GRAYSCALE );if ( src.empty() ){std::cerr << "无法读取图像" << std::endl;return -1;}// 定义G-API网络cv::GMat in;auto sobelx = cv::gapi::Sobel( in, CV_16S, 1, 0 ); // X方向上的Sobel滤波auto sobely = cv::gapi::Sobel( in, CV_16S, 0, 1 ); // Y方向上的Sobel滤波cv::GComputation comp( cv::GIn( in ), cv::GOut( sobelx, sobely ) );// 应用到源图像并获取结果cv::Mat sobelX, sobelY;comp.apply( cv::gin( src ), cv::gout( sobelX, sobelY ) );// 将结果转换为 CV_8U 并进行归一化以便显示cv::Mat sobelXAbs, sobelYAbs;cv::convertScaleAbs( sobelX, sobelXAbs ); // 转换为 CV_8U 并取绝对值cv::convertScaleAbs( sobelY, sobelYAbs ); // 转换为 CV_8U 并取绝对值// 可选:进一步归一化以增强对比度(如果需要)double sobelXMin, sobelXMax;double sobelYMin, sobelYMax;cv::minMaxLoc( sobelXAbs, &sobelXMin, &sobelXMax );cv::minMaxLoc( sobelYAbs, &sobelYMin, &sobelYMax );cv::Mat sobelXNorm, sobelYNorm;sobelXAbs.convertTo( sobelXNorm, CV_8U, 255.0 / ( sobelXMax - sobelXMin ), -sobelXMin * 255.0 / ( sobelXMax - sobelXMin ) );sobelYAbs.convertTo( sobelYNorm, CV_8U, 255.0 / ( sobelYMax - sobelYMin ), -sobelYMin * 255.0 / ( sobelYMax - sobelYMin ) );// 显示结果cv::imshow( "Original Image", src );cv::imshow( "Sobel X", sobelXNorm );cv::imshow( "Sobel Y", sobelYNorm );cv::waitKey( 0 );return 0;
}
运行结果
















![[数据结构]哈希表](http://pic.xiahunao.cn/[数据结构]哈希表)


