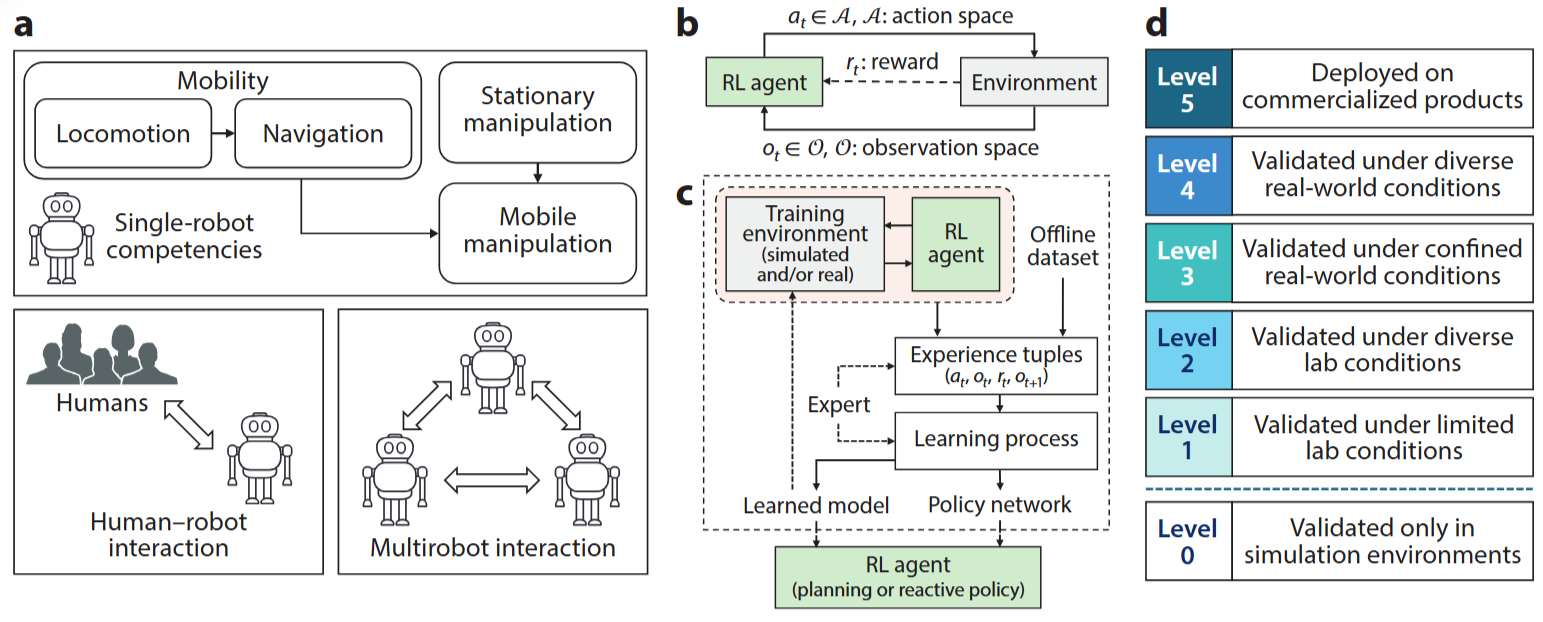
a. 机器人能力
1 单机器人能力(Single-robot competencies)
- 运动能力(Mobility)
- 行走(Locomotion)
- 导航(Navigation)
- 操作能力(Manipulation)
- 静态操作(Stationary manipulation)
- 移动操作(Mobile manipulation_MoMa):将运动与操作结合
2 人机交互(Human–robot interaction):机器人与人类实时协作、交流
3 多机器人交互(Multirobot interaction):多个机器人之间的协同
b. 问题建模(Problem Formulation)
- 强化学习基本模型的要素:
- 状态空间
- 动作空间
- 奖励函数
- 智能体与环境的交互过程
c. 解决策略(Solution Approach)
- 训练方式:
- 在线训练(环境实时交互)
- 离线数据集(offline dataset)
- 专家演示(expert demonstration)
- 学习过程:
- 经验元组
- 学习模型 / 策略网络(learned model / policy network)
- 推理方式:
- 规划式策略(planning policy)
- 反应式策略(reactive policy)
d. 现实世界成熟度(Level of Real-World Success)
| 等级 | 描述 |
|----------|----------------------------------|
| Level 5 | 已部署于商业化产品 |
| Level 4 | 在多种真实条件下验证 |
| Level 3 | 在受限真实条件下验证 |
| Level 2 | 在多样化实验室环境下验证 |
| Level 1 | 在受限实验室环境下验证 |
| Level 0 | 仅在仿真环境中验证 |
Problem Formulation
即如何为所研究的机器人能力构建最优控制策略的数学框架。在机器人任务中,强化学习问题通常被建模为:
- 部分可观马尔可夫决策过程(POMDP):用于单智能体强化学习(single-agent RL);
- 去中心化部分可观马尔可夫过程(Dec-POMDP):用于多智能体强化学习(Multiagent RL, MARL)任务。
a) 动作空间(Action Space)
动作空间定义了智能体的输出控制信号类型。可细分为三类:
- 低层动作(Low-level actions):如关节空间命令或电机控制信号;
- 中层动作(Mid-level actions):如任务空间中的位移或姿态目标;
- 高层动作(High-level actions):如带有时间延展性的任务序列命令或子程序调用(subroutines)。
b) 观测空间(Observation Space)
观测空间描述了智能体对环境状态的感知方式,主要包括:
- 高维观测(High-dimensional observations):如图像、激光雷达点云等原始传感器输入;
- 低维状态向量(Low-dimensional state estimates):如通过估计器或先验模型获得的简化状态表示。
c) 奖励函数(Reward Function)
奖励信号是强化学习的核心驱动因素。根据其反馈密度,可以分为:
- 稀疏奖励(Sparse reward):只有在完成特定目标后才给出奖励;
- 密集奖励(Dense reward):在任务过程中持续给出反馈,以鼓励或惩罚某些行为倾向。
Solution Approach
a) 模拟方式(Simulator Usage)
- Zero-shot sim-to-real transfer:完全基于模拟训练,直接迁移至真实环境,无需真实数据微调;
- Few-shot sim-to-real transfer:模拟训练为主,辅以少量真实环境微调;
- 无模拟器学习(learning directly offline or in the real world):完全在真实世界或离线数据集上进行训练,未使用模拟器。
b) 基于模型学习(Model Learning)
分析是否使用机器人交互数据对系统的**动力学模型(transition dynamics)**进行建模,分为:
- Model-based RL:学习显式模型,用于预测状态转移;
- Model-free RL:不使用或隐式使用环境模型;
- 部分建模(Partial modeling):仅对部分系统或任务阶段建模。
c) 专家示范使用(Expert Usage)
是否引入专家策略(expert policy)或专家数据(如人类演示、oracle 策略)以加速学习过程。方法包括:
- 行为克隆(Behavior Cloning)
- 模仿学习(Imitation Learning)
- 奖励塑形(Reward Shaping)等
d) 策略优化方式(Policy Optimization)
- 规划方法(Planning-based):如模型预测控制(MPC)等;
- 离线RL(Offline RL)
- 异策略RL(Off-policy RL):如 DDPG、TD3、SAC;
- 同策略RL(On-policy RL):如 PPO、TRPO。
e) 策略 / 模型表示方式(Policy/Model Representation)
- 多层感知器(Multilayer Perceptrons, MLP)
- 卷积神经网络(Convolutional Neural Networks, CNN)
- 循环神经网络(Recurrent Neural Networks, RNN)
- 图神经网络、Transformer等新型架构
图源:Deep Reinforcement Learning for Robotics: A Survey of Real-World Successes,Chen Tang1
案例教程:最新抖音视频文案提取方法替代方案,音频视频提取文案插件制作,手把手教学,完全免费教程)



)

![[ctfshow web入门] web6](http://pic.xiahunao.cn/[ctfshow web入门] web6)


快速进入深度学习pytorch环境)









