摘要——在本文中,我们研究了集成感知与通信(ISAC)系统的联合接收机设计,其中通信信号和目标回波信号同时被接收和处理,以在两种功能之间实现平衡性能。特别地,我们提出了两种设计方案来解决联合感知和通信问题中的接收信号处理。第一种方案基于最大似然(ML)检测、最小均方误差(MMSE)估计和干扰消除(IC),而第二种方案提出了一种针对目标估计的定制MMSE估计器,该估计器独立于检测器,从而形成了一种非IC设计。我们表明,将通信信号星座的结构信息纳入考虑后,非IC方法优于IC方法并实现最优性能。数值结果验证了所提出的最优设计的有效性。
索引词——集成感知与通信、最大似然、干扰消除、最小均方误差。
I. 引言
随着数十年的发展,无线网络现在正走向下一代,即5G-Advanced(5G-A)和6G。一方面,大量新兴的5G-A和6G应用,如车联网(V2X)和智慧城市,需要同时具备通信功能和无线电感知能力[1]。另一方面,感知和通信(S&C)系统正朝着更高频段和更大天线阵列发展,导致硬件架构和信号处理上的显著相似性[2]。由于技术趋势和商业需求,集成感知与通信(ISAC)被视为下一代无线网络的有前途的技术,并已经受到了工业界和学术界的广泛研究关注。
现有的ISAC信号处理方法主要集中在发射端设计,即ISAC波束形成和波形设计[3]、[4]。然而,关于ISAC系统接收信号处理的文献却相对有限。一般来说,ISAC接收机应能够从通信信号中解码有用信息,同时从回波中估计目标的状态/与目标相关的参数。这两项任务可能同时发生,导致ISAC系统设计中出现严重的相互干扰和挑战。实际上,同时进行的通信数据解码和目标感知可以被建模为一个联合检测和估计问题,这在统计推断领域已有研究[5]、[6]。然而,将这些研究中的结果直接应用于ISAC接收机设计可能并不适合,因为雷达中的目标检测和通信中的符号检测之间存在根本差异。以前的研究主要集中在目标检测上,涉及确定目标是否存在,这通常使用奈曼-皮尔逊准则作为二元假设检验问题来解决。然而,在ISAC场景中,检测问题通常是通信符号检测,涉及多假设检验问题,而NP准则并不常用。
与本文更相关的是,最近[7]和[8]中的研究探讨了雷达干扰下的通信符号解码,其中雷达信号的特定结构,如恒模和稀疏性,被利用来促进干扰消除和符号检测,这依赖于干扰消除(IC)方法。尽管各种IC技术在多用户检测中被广泛用于通信接收机并被证明可以大大提高通信性能[9],但它在ISAC接收机中是否有类似应用尚不清楚。
受上述研究的启发,我们的目标是为多输入多输出(MIMO) ISAC接收机设计联合通信和感知方案。具体而言,本文考虑了一个MIMO-ISAC基站(BS),它同时处理来自通信用户的上行信号和来自目标的回波信号。我们首先基于IC技术设计一个简单的ISAC接收机,该接收机为通信功能实现最佳性能,但对感知而言是次优的。为了提高感知性能,我们提出了另一种基于最小均方误差(MMSE)估计的目标估计方案,其中充分利用了通信星座的结构信息。此外,我们提供了所提出方案的相关性能分析,其中比特错误率(BER)和均方误差(MSE)被采用作为通信和感知的性能指标。最后,我们提供数值结果来验证所提出的ISAC接收机设计的有效性。我们的结果表明,IC操作相比其MMSE对应方案会导致感知性能下降,因为它忽略了通信信号的结构信息。
II. 系统模型
我们考虑一个配备有个发射天线和
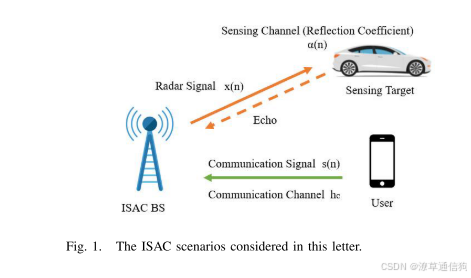
个接收天线的MIMO ISAC基站(BS),它在服务上行单天线用户的同时,作为单静态雷达检测单个目标,如图1所示。
令为用户发送并被基站接收的上行通信信号的第
个样本,
。ISAC基站接收到的通信信号向量由下式给出:
txSig_UE = pskmod(data_UE, M, phase_shift);
h_c = sqrt(beta) * sqrt(1/2) * (randn(NRx(nrx), L) + 1i * randn(NRx(nrx), L));
Comm_Rx = h_c(:, jj) .* txSig_UE(:, jj)+ noise;其中是上行单输入多输出(SIMO)通信信道向量,假定通过导频训练完全为基站所知,而
表示加性白高斯噪声(AWGN)向量。
令为基站发送的雷达信号的第
个样本,
为发射波束成形向量。ISAC基站接收到的反射回波信号由下式给出:
txSig_T = pskmod(data_T, M, phase_shift);
alpha = sqrt(0.5)*(randn(1, L) + 1i*randn(1, L)); % 反射系数矢量,复高斯噪声
a = exp(1i * 2 * pi * (0:NTx-1) * sin(theta_rad) * d).' / sqrt(NTx); % 发射方向矢量
b = exp(1i * 2 * pi * (0:NRx(nrx)-1) * sin(theta_rad) * d).' / sqrt(NRx(nrx)); % 接收方向矢量
f = a; % 发射波束成形矢量,与方向矢量a一致
Sensing_Rx = sqrt(gamma(ii)) * alpha(:, jj) .* (b * a' * f * txSig_T(:, jj))+ noise;
其中和
分别表示反射系数和目标角度,
和
分别是发射和接收波束形成向量。同样,
表示与
无关的AWGN向量。为简洁起见,我们假设目标位于单一距离门内,在这种情况下,目标参数是在给定时间延迟下估计的。
由于基站同时执行通信和感知任务,等式(1)和(2)中的信号可能同时被接收,导致以下S&C信号混合:
rxSig = Comm_Rx + Sensing_Rx ; 其中是一个零均值白高斯噪声向量,方差为
。
对于通信任务,我们的目标是通过混合接收信号和已知的
来恢复符号
。对于感知任务,我们专注于在已知探测信号
的情况下估计目标的反射系数
。遵循雷达文献中的标准假设[10],[11],并考虑到我们将注意力集中在反射系数的估计上,我们假设目标的角度是完全预测/跟踪的,在这种情况下我们有
。根据Swerling II目标模型[12],我们假设目标的反射系数从脉冲到脉冲具有瑞利/指数分布的振幅,在这种情况下
以独立同分布的方式遵循复高斯分布。为了表示方便,且不失一般性,我们通过噪声功率
对
的方差进行归一化,在这种情况下我们有
。
III. ISAC接收机设计
在本节中,我们提出两种ISAC接收信号处理的设计策略,即IC方法和非IC方法。
A. 次优设计:IC
第一步是检测通信符号,将其他信号,包括目标回波和噪声,视为不需要的信号。因此,信号模型可以表示为
其中。注意到随机变量
和向量
都是白高斯分布且相互独立,它们的线性组合
也是高斯分布,具有零均值和协方差矩阵为
R = g * g' + sigma_sq * eye(NRx(nrx));其中。这表明
是有色高斯分布,导致相关的通信子信道。有了已知的协方差矩阵,我们可以对接收信号进行白化并将通信信道分解为几个独立的子信道
其中是白化矩阵,
是标准高斯白噪声矩阵。
Q = sqrtm(inv(R)); % 白化矩阵,用于消除信道的相关性为了获得最大分集增益并制定的充分统计量,可以采用最大比率合并器(MRC)接收机[13]。令
为我们选择的合并器。合并后的通信信号模型可表示为
w = Q * h_c(:, jj); % MRC的加权矢量
rxSig_MRC = w' * Q * rxSig; % 进行MRC处理后的信号应用最大似然(ML)检测器来最小化解码错误。注意到也遵循AWGN分布的有用信号。在这种情况下,ML检测问题可以被表述为以下最小二乘(LS)问题[14]
euclidean_dist = []; % 欧几里得距离向量% 计算每个星座点的欧几里得距离for k = 1:Mref = w' * Q * h_c(:, jj) * constellation(k); % 参考信号euclidean_dist = [euclidean_dist, norm(rxSig_MRC - ref)]; % 计算距离end[x_val, x_indx] = sort(euclidean_dist); % 对距离排序
predicted_symbol = x_indx(1:p) - 1; % 选取最小距离对应的符号
ML_predict_txSig(jj) = predicted_symbol; % 存储最大似然预测的符号其中表示通信符号的字母表集合。问题(8)可以通过在字母表
中穷尽搜索最小值
来最优求解。显然,这种方案对通信实现了最优性能,原因是等式(7)是
的充分统计量。
有了,我们可以恢复通信信号并从固定接收信号(3)中减去它:
s_hat = pskmod(predicted_symbol, M, phase_shift); % 将预测符号重新PSK调制为信号
Comm_approx = h_c(:, jj) .* s_hat; % 接收到的近似通信信号
y_hat_s = rxSig - Comm_approx; 其中。
现在,剩余的任务是估计。可以观察到等式(9)是一个标准的贝叶斯线性模型,其中
服从先验分布
。然而,残差
的解析分布很难获得。幸运的是,在大多数情况下,ML检测器保证了检测性能,使得在高信噪比(SNR)下误差可以足够小。在残差误差已确定的情况下,可以构建最小MSE(MMSE)估计器,如[15]所示:
ka = b * a' * f * txSig_T(:, jj); % 计算感知信号ka矩阵
K = ka' * inv(ka' * ka + sigma_sq * eye(1)); % 感知信道估计的权重% eg(10)
alpha_hat(jj) = K * y_hat_s; % 估计alpha值
其中。
虽然估计器(10)方便应用于ISAC接收器,但我们需要指出它不是真正的MMSE估计器,因为它忽略了残差误差,因此导致次优性能。
B. 最优设计:非IC
尽管上述策略对通信是最优的,但IC处理会带来不可避免的残差误差。在随后的估计步骤中没有解决这个残差误差,而是将ML估计
作为点估计使用。因此,上述感知估计器是次优的,因为它没有考虑符号检测误差的结构。这种性能损失在中等或低信噪比场景中尤为明显。为了解决这个问题,我们为感知任务推导一个量身定制的MMSE估计器,通过利用通信星座的结构信息,在MSE意义上提供最优性能。为简洁起见,我们在以下推导中省略
。
我们首先处理混合接收信号(3)。我们假设通信星座中的每个符号出现的概率相等,这在大多数通信系统中是常见的。因此,通信符号均匀分布,即。根据贝叶斯估计理论,
的MMSE估计器是其后验概率密度函数(PDF)的均值,
表示为
其中。给定
,
和
是联合高斯分布,其条件协方差矩阵为
其中。联合分布的PDF为
其中。
如上所示,我们有且
,其中
。因此,
,其PDF为
将上述PDF代入等式(11),MMSE估计器表示为
公式(15)中的估计器不仅在最小化MSE的意义上是最优的,而且独立于通信检测器,因为它不依赖于检测结果。同时,ML检测器(8)在似然函数度量(以及在后验概率方面,如果先验PDF是均匀分布)中是最优的。因此,通过结合ML检测器(8)和MMSE估计器(15),通信和感知性能同时达到最优。
注释1:在多用户信息理论中,IC指的是先解码更强的分量然后再解码较弱的分量的方法。从这个意义上说,就是次优设计上述提出的方法似乎仅在通信信号功率大于感知信号功率的情况下适合IC方案。然而,在感知信号更强的情况下,IC也可能导致通信解码器的性能损失,这是由于被忽略的近似误差。因此,由于没有利用
的分布,通信解码器是次优的。简而言之,IC操作不可避免地导致性能下降,原因是在感知或通信信号中对结构信息的利用不充分。为简洁起见,我们在本节后面详细说明这种低效性。
IV. 性能分析
A. 通信信号检测
为了分析通信符号解码的比特误码率(BER)性能,我们关注通信信号模型(7)。由于这只是一个具有完美已知信道信息和噪声功率的加性高斯白噪声(AWGN)信道模型,我们可以根据函数轻松推导出BER的闭式表达,这取决于采用的调制格式。例如,对于使用相干解调器的QPSK调制,BER表示为
其中指的是合并后的总信噪比,由于采用了最大比合并(MRC)合并器,这等于所有子信道的信噪比之和。
B. 反射系数估计
根据贝叶斯估计理论,MMSE估计器与实际参数之间的均方误差(MSE)可以转化为条件方差的期望,表示为
由于公式(15)中的遵循混合高斯分布,公式(17)中的MSE通常没有闭式表达。因此,我们需要通过数值计算MSE来评估感知性能,这将在仿真结果中详细说明。
V. 数值结果
在本节中,我们提供数值结果来验证所提出的ISAC接收器设计的有效性以及近似BER的准确性。为了说明两种功能之间相互干扰的影响,我们使用以下系统模型
其中参数和
分别表示通信和感知信号的功率。相应地,通信信号
和感知信号
都被归一化。
我们考虑一个配备了个发射天线和
个接收天线的ISAC基站,两者都是间隔半波长的等间距线性阵列。由于我们主要关注感知和通信信号之间的相互干扰,噪声功率设置为
dB,这足够小,以便噪声不会影响对感知和通信互相干扰的分析。在不失一般性的情况下,我们设定
,并假设上行通信信道向量
是独立同分布的高斯随机变量,均值为零,方差为1。通信信号
和雷达信号
都调制为QPSK。
图2显示了在固定感知功率()和变化通信功率(
)下的通信和感知性能。可以观察到,理论BER完全符合所有接收天线数量下的仿真结果,非IC方法在感知MSE方面优于其IC对应方法。此外,通过增加接收天线获得的阵列增益显著提高了通信和感知性能。此外,从BER曲线的单调下降趋势可以看出,存在MSE曲线的拐点,随着接收天线数量的增加而向左移动。这种现象的原因在于通信功率的影响。一方面,增加的干扰功率导致感知性能下降。另一方面,更大的通信功率提高了检测性能,同时消除了干扰。随着通信功率的增加,消除效应超过了性能恶化效应,这导致了拐点。装备越多天线的ISAC接收器,消除效果越好,这导致拐点的移动。
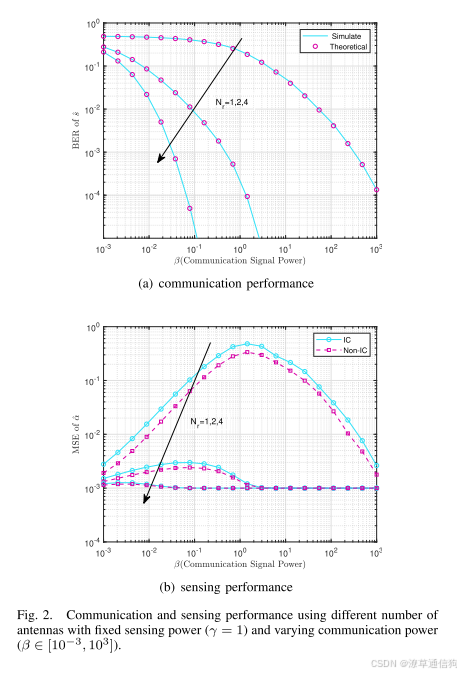
图3显示了使用不同调制方式的感知性能,包括BPSK、QPSK、8PSK和16QAM,固定感知功率()和变化通信功率(
)。如图所示,虽然由于调制方式的不同特性,感知性能在各调制方式下有所不同,但BER曲线在所有调制格式下显示相同的趋势,这也与上述分析一致。

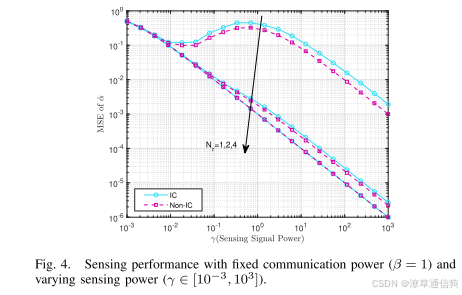
图4显示了固定通信功率()和变化感知功率(
)下的感知性能。随着
的增加,感知性能总体上呈现持续改善趋势,MMSE策略再次优于IC设计。然而,在
的情况下仍然存在拐点。当感知功率较小时,通信干扰的影响可以完全消除,而当感知功率较大时,这种影响则是固定的,这导致了MSE曲线的下降趋势。然而,当感知功率与通信功率相当时,相互干扰效应变得更加严重,导致感知性能下降。幸运的是,这种性能损失可以通过增加天线数量获得的阵列增益来补偿。
VI. 结论
在这篇信函中,我们研究了MIMO-ISAC系统的联合接收器设计,并提出了两种用于同时符号检测和目标回波估计的设计策略。特别地,第一种设计通过将目标回波干扰视为噪声来执行通信符号的ML检测,然后在减去解码的通信符号后用MMSE估计器估计目标的反射系数,这本质上是一个IC接收器。第二种方法则考虑到通信信号的结构信息,为目标估计制定了一个改进的MMSE估计器,同时用ML解码器检测通信符号。通过数值仿真分析了两种方法的性能,结果表明,非IC设计在感知MSE方面比其IC对应方法取得了更好的性能。


用于执行两个矩阵(或图像)逐元素乘法操作的函数mul())







)








