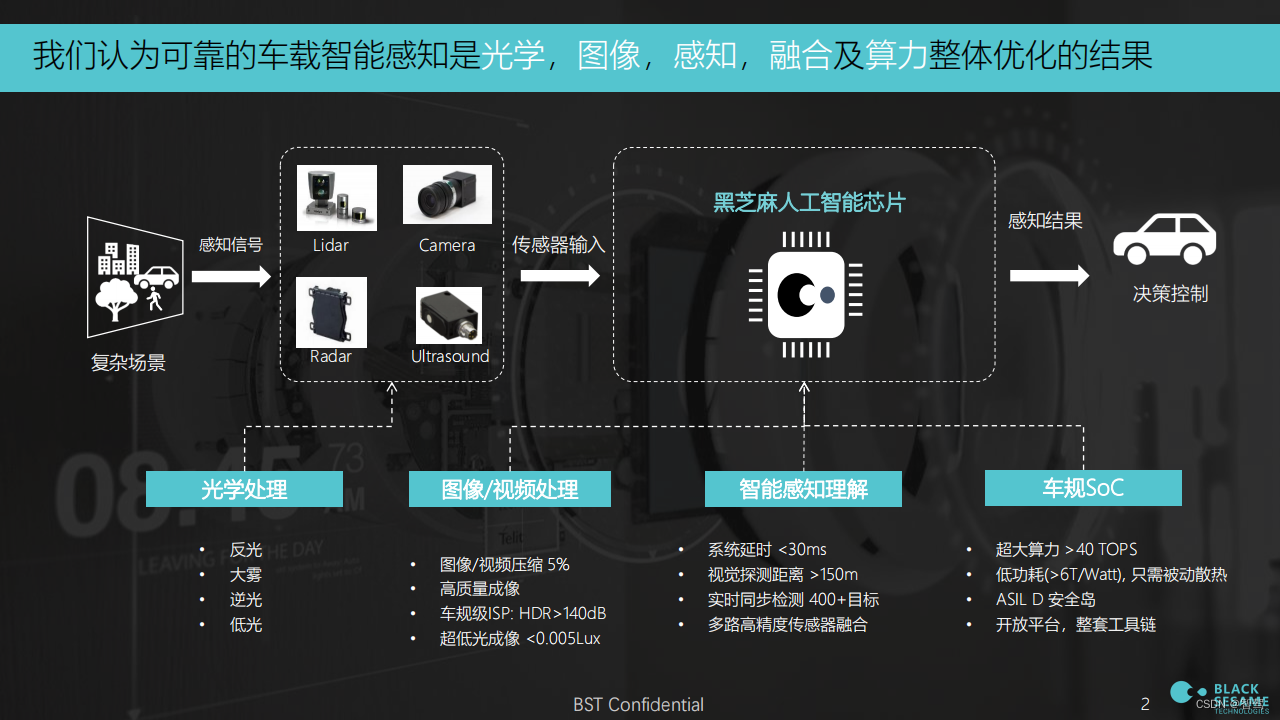
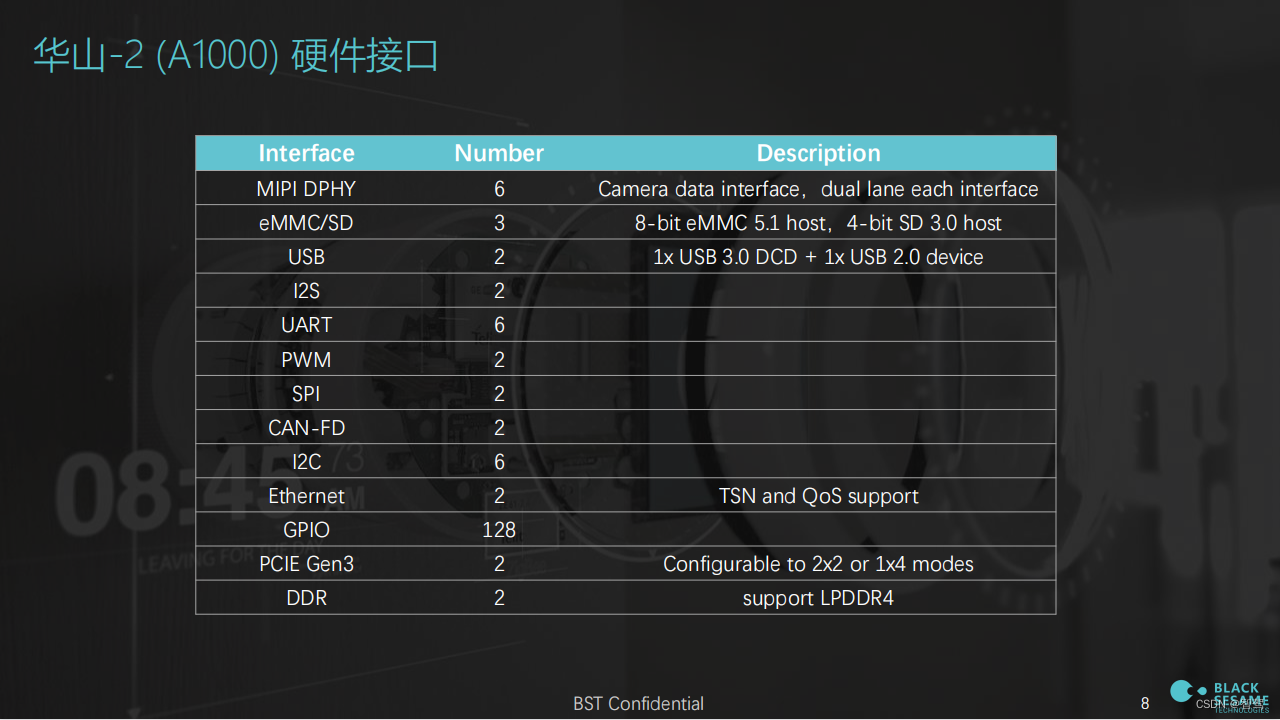
黑芝麻科技A1000简介


本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.mzph.cn/news/865001.shtml
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章
)
Latex写作工具整理(Overleaf)
一、公式(MathType)
先用MathType编辑好公式,再粘贴到Overleaf 预置-剪切和复制预置-选择“MathML或Tex"-确定 1.行内公式
粘贴到overleaf里面把两侧的" \["替换成"$"
$ A $
2.单行公式
\begin{equation}\labe…

ROS2 rosbag2记录仪
rosbag2类似于行车记录仪,录制一段话题数据,录制完成后可以多次发布出来进行测试和实验,也可以将话题数据分享给别人用于验证算法等。
1.启动talker服务
ros2 run demo_nodes_cpp talker 2.记录话题数据 chatter
ros2 bag record /chatte…

CSRF是什么攻击 该如何解决
CSRF是什么攻击
CSRF(Cross-Site Request Forgery),即跨站请求伪造攻击,也被称为“one-click attack”或“session riding”。它是一种网络攻击方式,利用已认证用户在受信任网站上的身份,诱使用户在不知情…

将多个SQL查询合并的两种方式
说明:单个简单查询是非常容易的,但是为了避免多次访问访问数据库,我们会尽可能通过表关联将业务所需要的字段值一次性查出来。而有时候不太清楚表之间的关联关系(这取决于对业务的熟悉程度),或者实际情况就…

2024年工程项目管理者的软件指南:11款必试进度管理工具
本文将分享11个值得关注的工程项目进度管理软件:Worktile、Fieldwire、Procore、Buildxact、InEight、Contractor Foreman、Housecall Pro、ClickUp、RedTeam Go、Visual Planning、B2W Schedule。 在竞争激烈的建筑行业,工程项目的进度管理是项目成功的…
)
超简洁Django个人博客系统(适合初学者)
一、环境介绍
Django4.2.13Markdown3.3.4PyMySQL1.1.1Python3.8PyCharm 2023.1.2 (Professional Edition)
二、功能简介 用户登录
通过在pycharm终端执行以下命令创建超级管理员。python manage.py create createsuperuser 创建完成后再通过新建的超级管理员账号进行登录 …

零基础开始学习鸿蒙开发-读书app简单的设计与开发
目录 1.首页设计
2.发现页面的设计
3.设置页面的设计
4.导航页设计
5.总结:
6.最终的效果 1.首页设计
@Entry
@Component
export struct home {@State message: string = 首页build() {Row() {Column() {Text(this.message).fontSize(50).fontWeight(FontWeight.Bold)}.…
》)
《深入浅出MySQL:数据库开发、优化与管理维护(第3版)》
深入浅出MySQL sql执行流程第一步:通过连接器进行连接第二步:解析器解析 SQL第三步:执行SQL 行记录存储格式行溢出日志数据库三大范式第一范式第二范式第三范式 索引索引分类B树索引BTree vs Hash需要索引1、字段需要频繁的查询操作2、字段用…

CentOS7.9下yum升级Apache HTTP Server2.4.6到2.4.60
CentOS7.9系统默认的Apache版本
在CentOS7.9上,如果使用yum安装Apache HTTP Server是最多到2.4.6版本的,这是因为el7下官方仓库的最高版本就是2.4.6,证据如下:
$ yum info httpd
......
Installed Packages
Name : httpd…

深入解析:Java爬虫的本质是什么?
深入解析:Java爬虫的本质是什么?
引言: 随着互联网的快速发展,获取网络数据已成为许多应用场景中的重要需求。而爬虫作为一种自动化程序,能够模拟人类浏览器的行为,从网页中提取所需信息,成为了…

Java微服务架构中的消息总线设计
Java微服务架构中的消息总线设计
大家好,我是免费搭建查券返利机器人省钱赚佣金就用微赚淘客系统3.0的小编,也是冬天不穿秋裤,天冷也要风度的程序猿!今天我们将深入探讨在Java微服务架构中的消息总线设计。
一、什么是消息总线&…

ROS2使用C++开发动作通信
1.开发接口节点
cd chapt4_ws/ ros2 pkg create robot_control_interfaces --build-type ament_cmake --destination-directory src --maintainer-name "joe" --maintainer-email "1027038527qq.com" mkdir -p src/robot_control_interfaces/action touch…

ATFX汇市:欧元区CPI与失业率数据同时发布,欧元或迎剧烈波动
ATFX汇市:CPI数据是中央银行决策货币政策的主要依据,失业率数据是中央银行判断劳动力市场健康状况的核心指标。欧元区的CPI和失业率数据将在今日17:00同时发布,在欧央行6月6日降息一次的背景下,两项数据将显著影响国际市场对欧央行…

02归并排序——分治递归
02_归并排序_——分治_递归_
#include <stdio.h>void merge(int arr[], int l, int m, int r)
{int n1 m -l 1;int n2 r -m;//创建临时数组int L[n1], R[n2];for(int i 0; i < n1; i){L[i] arr[l i];}for(int j 0; j < n2; j){R[j] arr[m 1 j];}int i …

mp4格式怎么转换成mp3格式,简鹿格式工厂轻松转换
mp4格式怎么转换成mp3格式?MP3主要关注音频内容的压缩与传播,而MP4则是一个更为复杂的多媒体容器,能够包含视频、音频等多种媒体流,适合于现代多样化的媒体消费场景。
而有一些视频中的音频可能深受用户喜爱,可是如何…


【第13章】MyBatis-Plus流式查询
文章目录 前言一、常用方法二、使用示例总结 前言
MyBatis-Plus 从 3.5.4 版本开始支持流式查询,这是 MyBatis 的原生功能,通过 ResultHandler 接口实现结果集的流式查询。这种查询方式适用于数据跑批或处理大数据的业务场景。
在 BaseMapper 中&#…

【信息系统项目管理师知识点速记】组织通用管理:知识管理
23.3 知识管理
23.3.1 知识管理基础
知识管理是通过利用各种知识和技术手段,帮助组织和个人生产、分享、应用和创新知识,以形成知识优势并在个人、组织、业务目标、经济绩效和社会效益方面产生价值的过程。它能为组织带来知识增值,创造新的价值,提升决策效能和水平,是提…

《昇思 25 天学习打卡营第 8 天 | 模型保存与加载使用静态图加速 》
活动地址:https://xihe.mindspore.cn/events/mindspore-training-camp 签名:Sam9029 保存与加载模型没有多少内容,就把使用静态图加速一起看了 先说说现有理解的概念
在学习深度学习的过程中,经常需要保存训练好的模型参数&#…

snowflake 不再是个数据仓库公司了
标题先上结论,为啥这么认为,且听接下来道来。
snowflake 非常成功,开创了云数仓先河,至今在数仓架构上也是相对比较先进的,国内一堆模仿的公司,传统上我们会认为 snowflake 肯定是一家数据仓库公司。不过最…