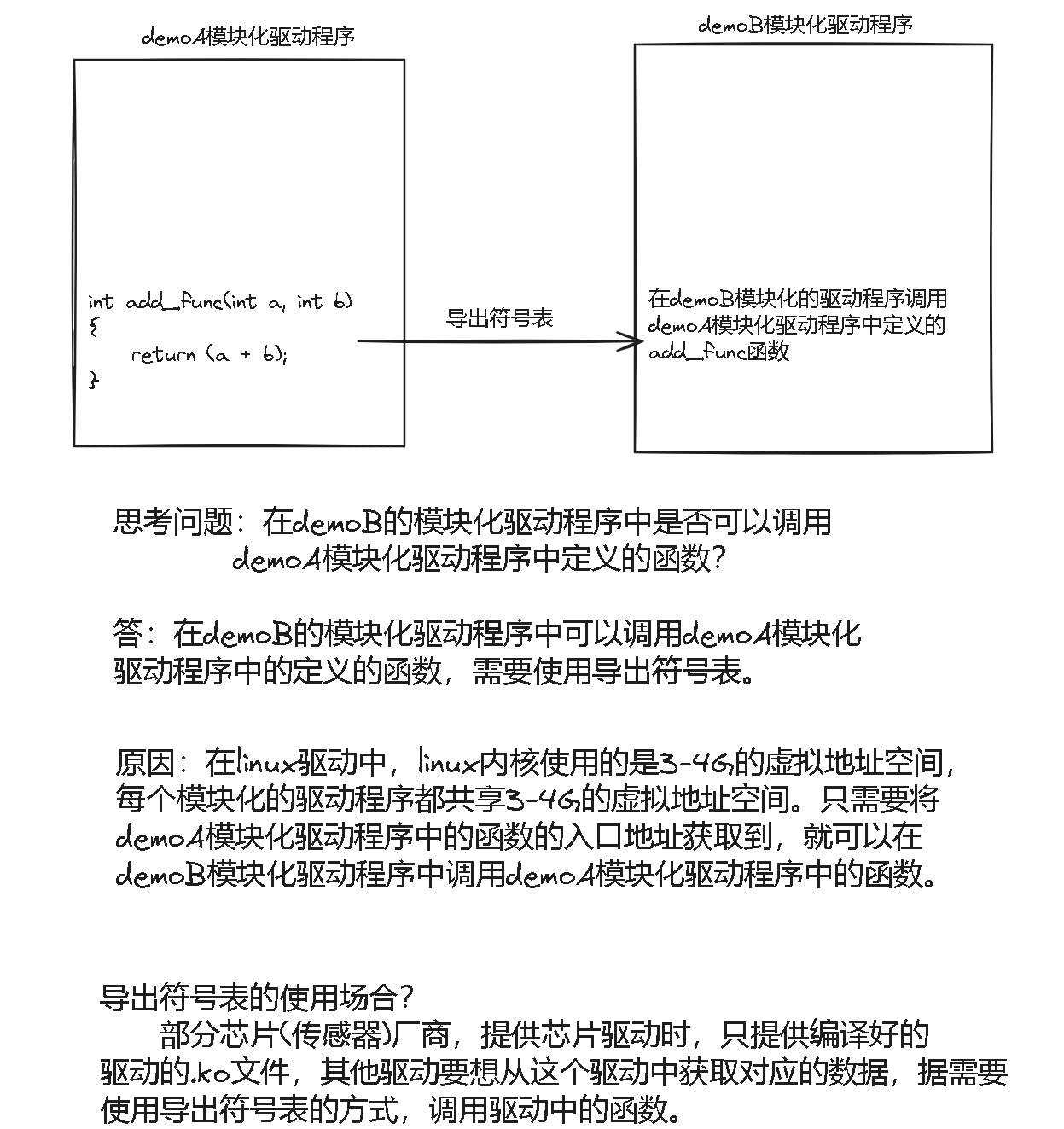
1.导出符号表的原理?
2.字符设备驱动的框架流程
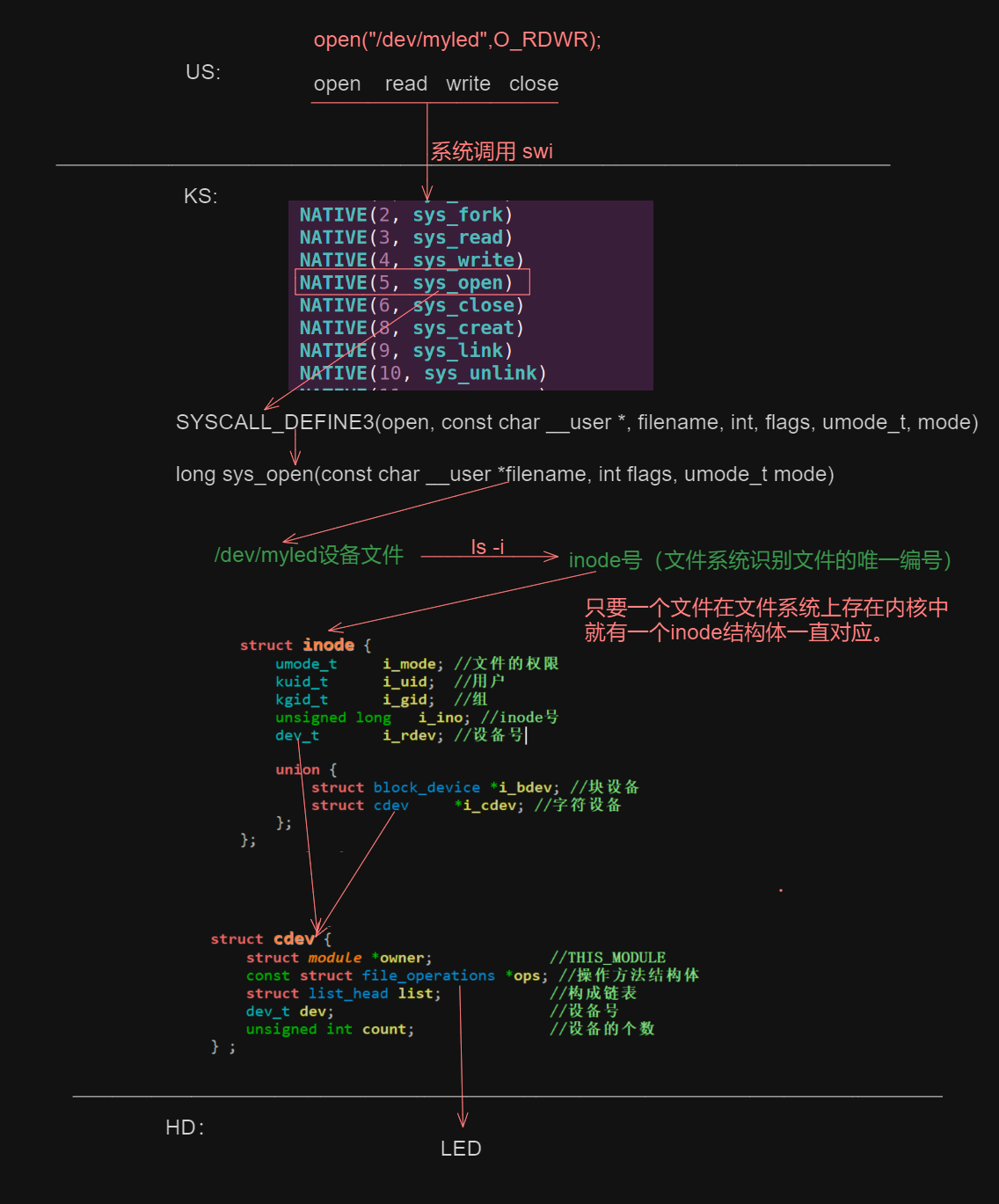
open read wirte close 是系统调用(从用户空间进入内核空间的唯一的方法)会产生swi软中断《也会存在软中断号》(从User模式切换到SVC(管理模式)下因为在内核空间操作硬件SVC才有管理权限),在这个过程中他会去arch/arm/include/generated/calls-eabi.S文件中去找到对应的系统调用号,这是用户层和内核层的接口
通过sys_open![]() 找到对应的设备文件,然后通过文件找到inode号(文件系统识别文件的唯一编号)
找到对应的设备文件,然后通过文件找到inode号(文件系统识别文件的唯一编号)
(只要一个文件在文件系统上存在内核中,那么就有一个对应inode结构体与之对应)。
通过inode结构体中的dev_t和cdev就可确定唯一的cdev结构体(字符设备驱动)然后来操作下层的硬件。
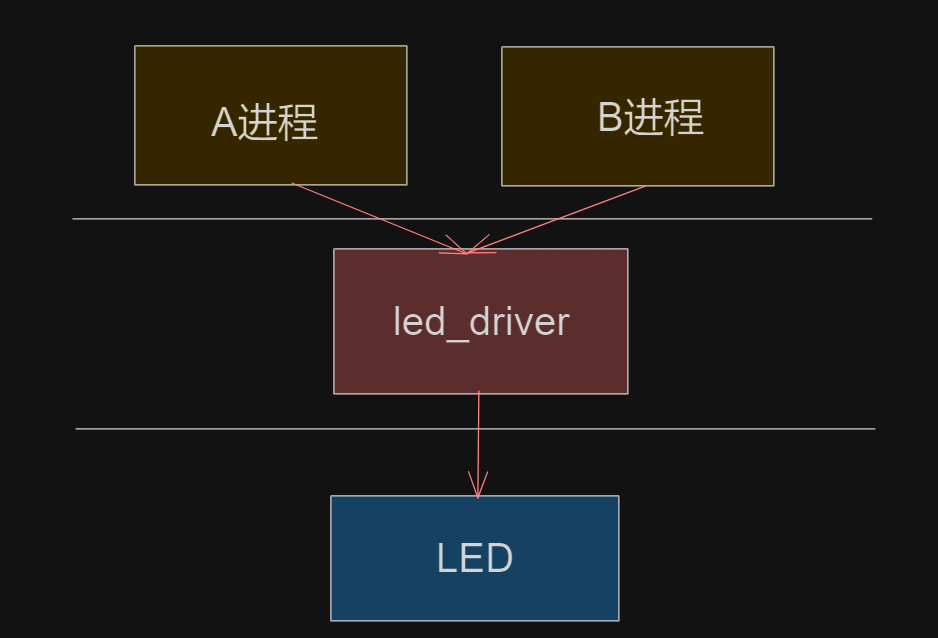
3.linux内核中并发和竞态的解决方法?
当多个进程同时访问驱动的临界资源的时候竞态就会产生了。
(1)中断屏蔽(了解)
中断屏蔽:中断屏蔽只对单核处理器有效,中断屏蔽就是将中断临时关闭掉。
中断屏蔽的临界区要尽可能的短,如果中断屏蔽的时间很长就可能会造成用户
数据的丢失或者内核的崩溃。(在中断屏蔽期间不需要有延时,耗时,甚至休眠的操作)。
(2)自旋锁(重点)
什么是自旋锁?
当一个进程获取到自旋锁之后,如果此时有另外一个进程也想获取这把锁,
此时后一个进程处于自旋状态(原地打转的状态)。自旋锁又叫做忙等锁。
自旋锁的特点
1. 自旋状态是需要消耗cpu资源的
2. 自旋锁保护的临界区要尽可能的短,只有这样它的效率才会高。
在自旋锁保护的临界区中不能有延时,耗时,休眠的操作。
3. 在自旋锁保护的临界区内不能够调用copy\_to\_user/copy\_from\_user等函数
4. 自旋锁可能会导致死锁(在同一个进程内多次获取同一把未解锁的锁)
5. 自旋锁可以在中断上下文使用
6. 自旋锁在上锁前会关闭抢占
(3)信号量(重点)
什么是信号量?
当一个进程获取到信号量之后,如果此时有另外一个进程也想获取这个信号量,
此时后一个进程处于休眠状态。休眠状态是不需要消耗CPU资源。
信号量的特点
1. 信号量获取不到资源的时候不消耗CPU
2. 信号量保护的临界区可以很大,里面可以有延时,耗时,甚至休眠的操作
3. 信号量工作进程上下文
4. 信号量不会产生死锁现象
5. 信号量上上锁前也是不会关闭抢占的
(4)互斥体(会用)
什么是互斥锁?
当一个进程获取到互斥体之后,如果此时有另外一个进程也想获取这个互斥体,
此时后一个进程处于休眠状态。互斥体又叫做排它锁。
互斥体的特点
1. 互斥体获取不到资源的时候不消耗CPU
2. 互斥体保护的临界区可以很大,里面可以有延时,耗时,甚至休眠的操作
3. 互斥体工作进程上下文
4. 互斥体不会产生死锁现象
5. 互斥体上锁前也是不会关闭抢占的
6. 互斥体在获取不到资源的时候,会适当的等一会儿再决定是否进入休眠状态,如果 临界区比较大它会进入休眠状态,临界区比较小的时候在等待期间,获取资源就可以直接运行而不休眠了。
(5)原子操作(会用)
什么是原子操作?
原子操作名字就是根据它的特性得到的,在使用原子操作的时候如果执行了原子操作
中间的过程是不允许被打断的,认为原子是可以最小的不可被分割的整体。原子操作
并没有像自旋锁或者信号量那么多特性,它本身就是通过一个原子变量实现的。原子操作
的内部实现:1.保证只有一个核能操作这个变量,2在一个核上对变量的值的修改过程通
过内联汇编完成。
4.IO模型
IO模型的种类:非阻塞,阻塞,IO多路复用,异步通知(信号驱动IO)
5.select/poll/epoll的区别?
select:(位图(表))
1. select监听的文件描述符是1024个
2. select有清空表的过程,需要反复构造表,拷贝表,效率比较低
3. select对应的进程从休眠态被唤醒之后,需要再次bianli文件描述符,效率比较低
poll:(链表)
1. poll监听的文件描述符没有个数限制
2. poll不会清空表,效率高于select
3. poll对应的进程从休眠态被唤醒之后,需要再次遍历文件描述符,效率比较低
epoll:(红黑树+双链表)
1. epoll监听的文件描述符没有个数限制
2. epoll不会清空表,效率高于select
3. epoll对应的进程从休眠态被唤醒之后,它能直接拿到就绪的文件描述符,不需要再次变量效率高
6.ARM工作模式及异常源
工作模式
1. 用户模式 User
2. 系统模式 Sys
3. SVC模式 管理模式
4. IRQ模式 普通中断模式
5. FIQ模式 快速中断模式
6. 终止模式 ABT
7. 未定义模式 UND
异常模式及异常源
异常模式有5种:
1. SVC异常模式
2. IRQ异常模式
3. FIQ异常模式
4. 终止异常模式
5. 未定义异常模式
异常源有7种:
1. reset异常
2. swi异常
3. IRQ异常
4. FIQ异常
5. 预取终止异常
6. 数据访问终止异常
7. 未定义异常
8. **Reset异常**:当处理器接收到复位信号时触发的异常,它将处理器状态重置到某种初始状态。
9. **SWI异常**:SWI(Software Interrupt)指令用于在程序中请求操作系统服务。当这个指令被执行时,处理器会触发SWI异常,然后将控制权转移到操作系统的相应服务例程。
10. **IRQ异常**:IRQ(Interrupt Request)异常是由外部设备发出的中断请求引起的异常。处理器响应这种异常来处理外部设备的事件。
11. **FIQ异常**:FIQ(Fast Interrupt Request)异常是一种高优先级的中断请求,通常用于处理时间敏感性较高的任务。
12. **预取终止异常**:这种异常发生在处理器试图执行指令预取时遇到问题时。可能是由于无效的指令地址或者存储器访问权限不足等原因引起的。
13. **数据访问终止异常**:当处理器试图访问无效的内存地址或者访问权限不足时触发的异常。
14. **未定义异常**:当处理器尝试执行未定义的指令或者遇到无法识别的操作码时触发的异常。

7.中断底半部机制
为什么需要中断底半部?
在中断顶半部中不能够做延时,耗时,或者休眠的操作,也就是说在中断顶半部
只能做紧急的,不耗时的任务。但是有的时候又希望在中断到来的时候做尽可能多
的操作,所以两者就产生了矛盾。linux内核为了解决这一矛盾专门设计了中断底半部
机制。也就是说在中断底半部中可以做不紧急的,耗时的的任务。中断底半部机制
分别是 软中断(个数限制32,留给内核使用),tasklet,工作队列。
例子:软中断
在网卡中断到了的时候需要从网络上接受数据,接收数据的过程就是耗时操作,
如果把它放在中断顶半部中是不可以的。所以linux内核开发者将接收网络数据的过程
放在了软中断这个底半部机制中完成。
(1)tasklet底半部机制
tasklet底半部机制的特点
tasklet是基于软中断实现的,tasklet没有个数限制,因为它是通过链表实现的。
tasklet工作在中断上下文,不能够脱离中断顶半部单独执行,tasklet底半部是在
中断顶半部执行即将结束的时候开启。tasklet底半部中可以做短延时或者耗时操作
但是不能够做长延时或者休眠操作。
(2)工作队列底半部机制
工作队列底半部机制特点
在linux内核启动的时候会创建一个events线程,这个线程默认处于休眠状态,在
这个线程中维护一个队列,如果需要让events线程执行你的任务,只需要向队列
中添加队列项,然后唤醒休眠的线程,工作队列底半部处理函数就会被调用执行。
工作队列工作在进程上下文,它可以脱离中断单独执行。它也是没有个数限制的。
在工作队列的底半部处理函数中可以做耗时,延时,甚至休眠的操作。
8.platform总线驱动
在Linux内核中所有总线驱动都遵从设备驱动的模型,总线驱动的模型如下图:
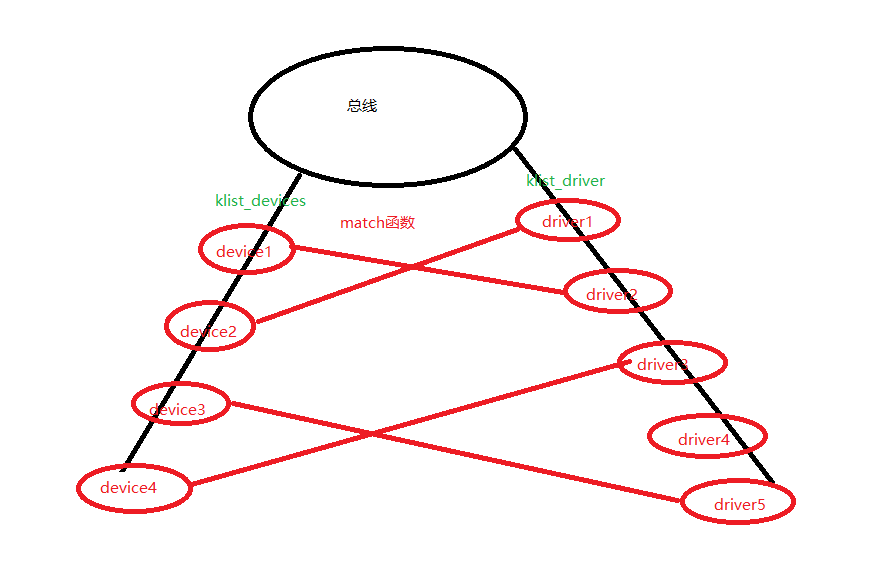
内核在设计这些总线驱动模型的时候将一个驱动分为了三个
部分device、bus、driver。device是用来描述硬件设备的,
bus是总线 **用来链接device和driver,**driver是用来描述驱动的
对象。在内核中所有的device放在内核的klist_devices的链表
中管理,而内核中所有的driver放在klist_driver中管理。内核中
的device和driver通过bus完成关联。当device和driver匹配成
功之后执行驱动的probe函数,在probe函数中就可以完成操
作硬件了。当卸载任何一方驱动的时候都会执行驱动中的
remove函数。
主要思想就是将设备信息和设备驱动进行分离
platform总线驱动遵从设备模型,platform是Linux内核抽象
出来的软件代码,并没有真实的总线协议与之对应。platform
总线驱动的思想就是要将设备信息和设备驱动进行分离。
platform_device和platform_driver通过总线匹配成功之后会执
行驱动中probe函数,在probe函数中驱动就能够拿到设备信息。
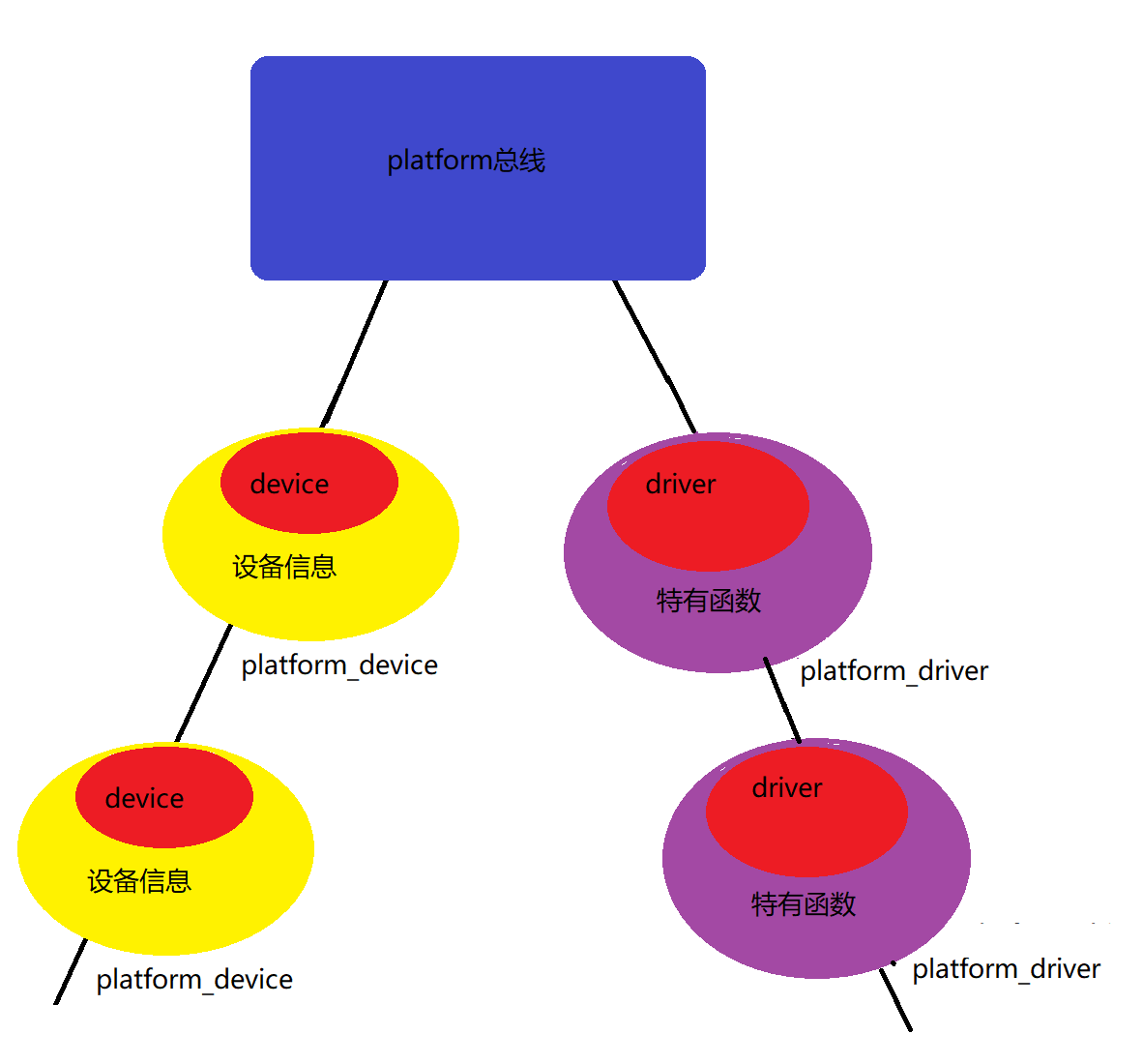
它有三种匹配信息的方式(1)名字匹配 (2)idtable (3)设备树匹配方式


详解)





:用正则表达式进行搜索)


)

附带源码)


)

)
