阻抗控制(Impedance Control)和导纳控制(Admittance Control)
是两种用于机械臂或机器人交互控制的策略。阻抗控制定义的是机器人端部的力和位置之间的关系,而导纳控制则定义的是外力和运动之间的关系。导纳控制常用于处理机器人与环境交互中的力控制问题。
适用场景对比
- 阻抗控制 更适用于需要精确力控制和快速响应的任务,如机器人手臂的精细操作、装配和抓取等。
- 导纳控制 更适用于与环境交互频繁且环境变化较大的任务,如协作机器人、康复机器人等。
1、阻抗控制(Impedance Control)原理
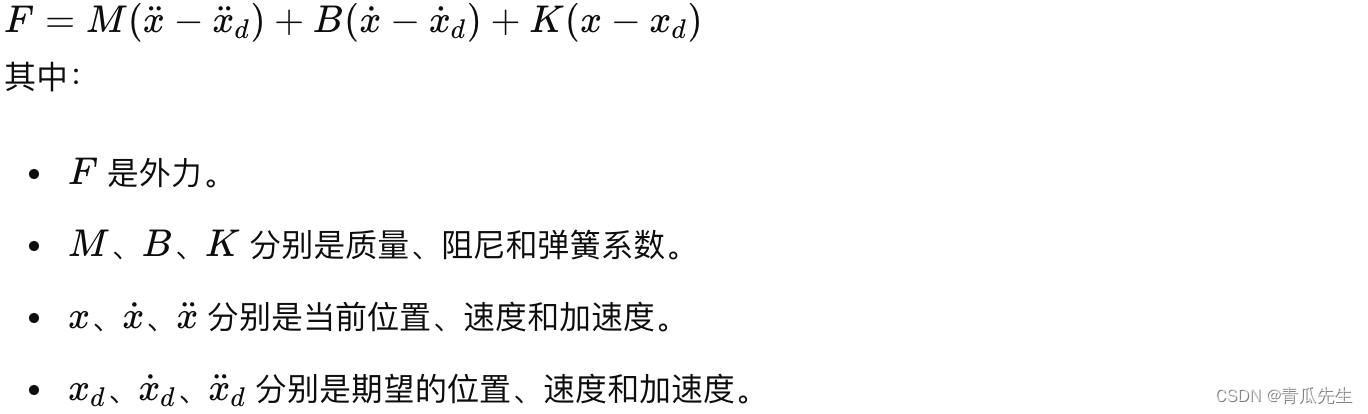
阻抗控制通过模拟机械阻抗(即质量-弹簧-阻尼系统)来控制机械臂的动态行为。其目标是使机械臂对外力的响应表现得像一个特定的机械系统。
- 阻抗控制的基本方程为:
优点
- 直观性强:直接将机械系统的物理特性(质量、阻尼、弹簧)应用于控制中,便于理解和调试。
- 响应迅速:对突发的外力变化能够快速响应,适用于需要精确力控制的场景。
- 适用性广泛:可以应用于多种机器人任务中,包括精细操作、装配和抓取等。
缺点
- 参数调节困难&#x
)

)













(2024-06-13))


