一、背景介绍
在STK12中,在Astrogator的模块上开发了新的模块(Rendezvous and proximity operations)。轨道交会接近通常来说是一个很复杂的过程。RPO实现需要对轨道动力学有一个清晰的理解,并且对于Astrogator模块具备很强的背景和经验,同时对于数值积分求解器有一个很深的理解。同时掌握基本的编程能力去和Astrogator的脚本交互。AGI公司为了让整个RPO任务更容易上手,推出了该模块
二、模块操作
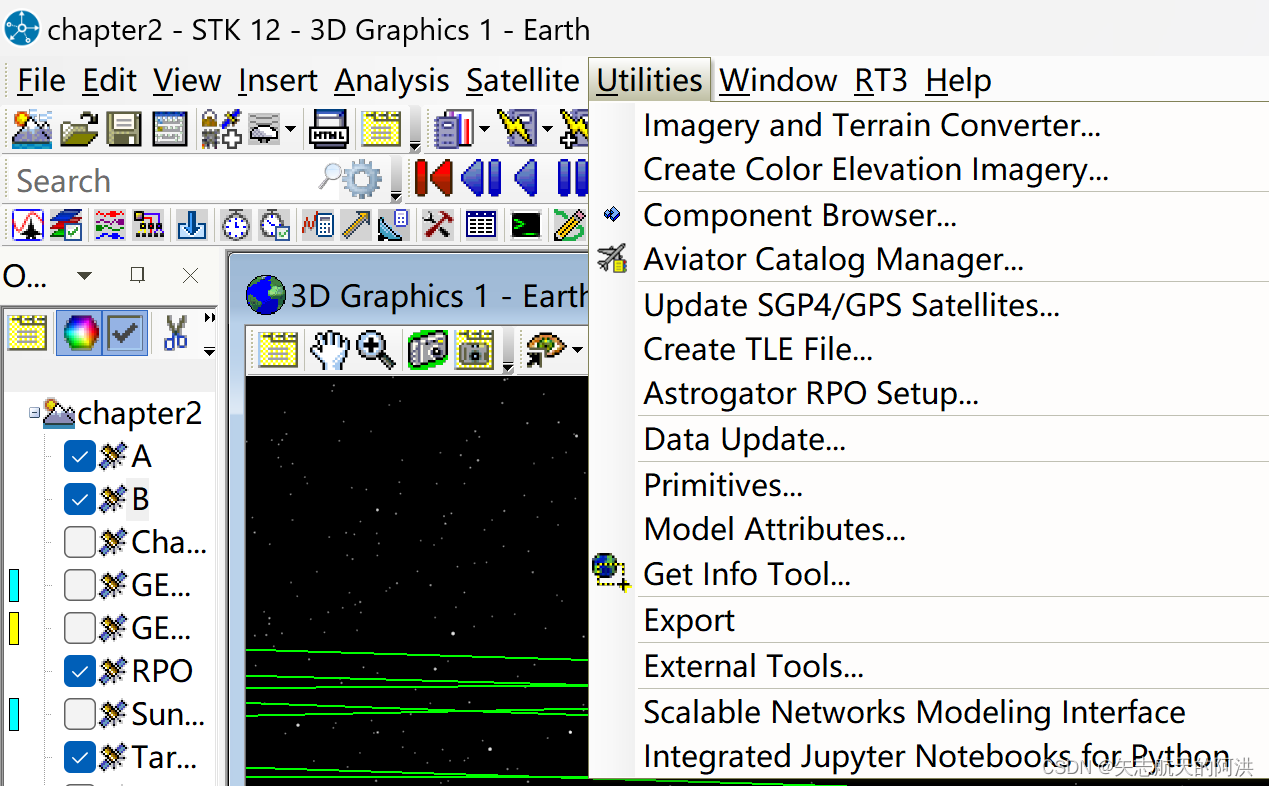
首先配置好STK中的RPO模块。打开STK12,点击Utilities-Astrogator RPO Setup-Load Template Files

RPO序列的基本前提是在遵循任务设计的同时,按时间顺序排列。这首先第一步就是定义参考飞行器使用Set_Reference_Vehicle序列。这个参考飞行器通常是目标飞行器,但它也能是相当于卫星的某一位置,就比如RPO任务里的交会段。在执行RPO卫星机动序列,你必须配置目标卫星。在STK附带的模块对象中,默认目标星被命名为“Target”。
你必须确保目标星的传播时间,确保这里有足够的星历产生来覆盖整个任务时间。这个目标星能够指场景里的任何卫星,但是在运行卫星的MCS序列之前,你必须建立Follow卫星的对象

下一步就是确定追踪星的初始状态。你可以通过一个交会序列(GEO_To_GEO_Rendezvous_Drifting)或者一个Set_Initial_State序列,定义了相对参考坐标系的初始状态。这样之后,你可以进行接近任务。
三、限制和约束条件
自动序列
VBar_Approach和RBar_Approach在使用相关序列之前,使用需要任务规划器填充的任务序列。
发动机推力水平有限
如果你想使用有限机动解决方案,一个问题是有限发动机推力水平的选择。如果你选择的推力水平太小,机动会重叠,序列会失败。如果推力水平太大,则机动可能太短。当有限的机动持续时间很小(小于一秒)时,很难在物理上实现可重复的Delta-V。因此,对于接近操作部分,应使用0.1N至10N之间的推力大小——假设总质量为1000 kg,有效加速度是关键因素。交会作战通常需要更大的推力水平,因为相关的V通常大于接近作战当量
轨道类型
所有案例图片都是GEO交会序列的详细介绍。这些序列适用于所有的轨道状态(不仅仅是GEO),但是自然运动序列对于圆轨道工作的更好,比如TearDrop序列被限制在圆轨道。你可以仅仅使用GEO近园轨道对于 GEO_to_GEO_Rendevous_Nolead,GEO_to_GEO_Rendezvous_Drifting,和Exit_GEO序列。你应该通常限制转移时间小于一圈,所以检查目标性的时期。你能够修改这些限制条件如果必要的话。这个RPO的Delta-V通常随着目标轨道速度的增加而增加。另外,对于低轨的圆轨道,你能够期望DeltaV大一点来完成相同的RPO任务。另外,对于LEO的情况,微分阻力编程一个问题在低高度上,设置是地域,形状,尺寸以及追逐星和目标星的质量都是很重要的。HEO的RPO任务是相对影响较小的;然而,通过近地点所需的强迫运动很大,你可能希望暂停通过近地点的强迫运动。
预报器
默认的 ,RPO序列使用一个预报器包含所有力模型——拉力,太阳光压,第三体引力,和21*21的引力势能。有一些序列要求你限制最大步数确保预报器不会错过关键条件。在这种情况下,Astroagtor提供了预报器叫做”Small_Step",设置最大的步长为60s。有时,一些序列会使用Hill方程来初始化RPO的机动,但传播方会使用基于初始猜测的全力模型进行所有计算。Astrogator的脚本工具决定了最初的猜测。脚本工具还控制执行,并根据您的输入参数强制执行某些逻辑。
Astrogator使用脚本工具在三个地方。1、前向和后向序列 2、目标序列的轮廓。3、嵌入到差分修正器或者优化器,在迭代前优先执行。
序列
你将不能直接使用下列四种序列在任务序列中:InTrack_Finite,InTrack_Impulsive,Radial_Finite和Radial_Impulsive。然而,这些作为自动执行序列在接近序列RBar-Approach和V-BarApproch。此外,仅在需要时添加到场景中的所需参考卫星中使用以下四个序列MatchOrbit_Reference,NMC_Reference,Perchi_Reference和VBar_Reference。
四、序列列表和相关的函数
这里有许多可用的序列对于接近操作阶段。以下是按类别和字母顺序列出的序列。一些序列例如:VBar,NMCCircummav,TearDrop,FMCIrcumnav,FollowSun,和其他序列从当前位置转换到所选接近操作的起始位置。你可以定义转移时间,然后这些序列使用强迫运动点来是现在位置移动到开始接近操作的点。这里还有其他序列要求初始位置是正确的对于这些序列,例如VBar_To_NMCircumnav,RBar_To_NMCircumnav,NMCircumnav_To_VBar,NMCircumnav_To_RBar,VBar_To_RBar和其他序列。在这些序列中,输入状态必须已经处于适当的条件下(例如,在VBar上)。其他序列,如Coast、Stop_RelRate、Stop_PlaneCross和其他序列,在某个条件下停止传播。
下一节开始介绍RPO每个序列的功能
)


![[算法][BFS][leetcode]994. 腐烂的橘子](http://pic.xiahunao.cn/[算法][BFS][leetcode]994. 腐烂的橘子)




)


)







