为了满足不同条件下的用途,编了一个简单的一维状态量下的EKF,后面准备出UKF和CKF的版本。
使用的系统是非线性的,以体现算法对于非线性系统的性能。(状态方程和观测方程均设计成非线性的)
程序运行截图
程序都在一个m文件里面,粘贴到matlab的编辑器就能运行,如果中文注释是乱码,改成UTF-8的编码模式即可。
下面是程序运行截图:
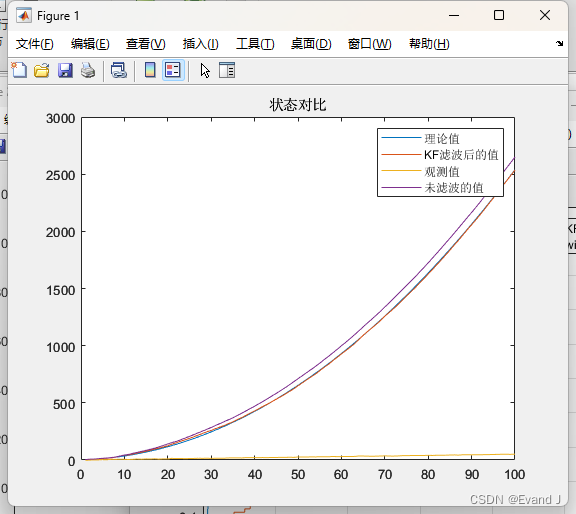
状态时序:
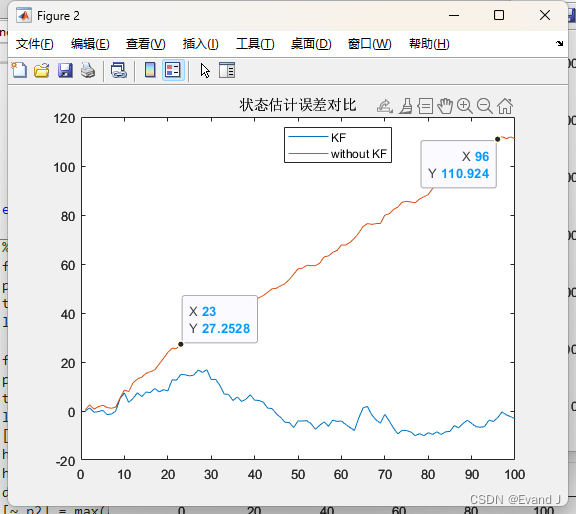
滤波后与滤波前(滤波前有累积误差)的误差的对比图:
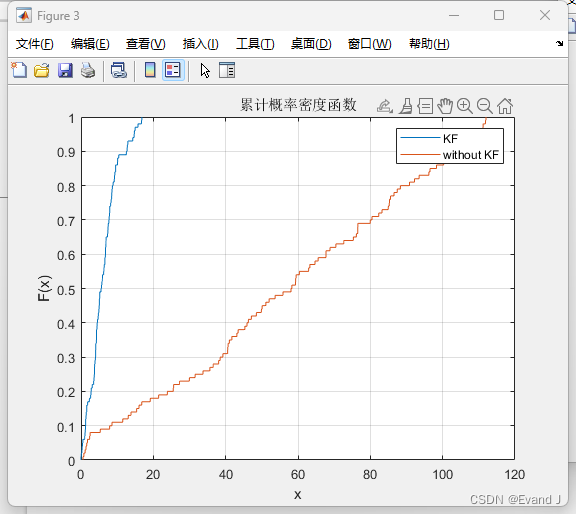
误差的累积分布函数图像:
程序源代码
% 一维非线性状态、非线性观测的EKF例程
% Evand©2024,Email:evandjiang@foxmail.com(除前期协商一致外,咨询需要付费)
% 





都具有对象的特性)







12.4-12.6)


![[后端开发] 过滤器相关注解](http://pic.xiahunao.cn/[后端开发] 过滤器相关注解)

)