1、写在最前
先了解一下GPRMC的格式
格 式:
GPRMC,024813.640,A,3158.4608,N,11848.3737,E,10.05,324.27,150706,A*50
说 明:
字段 0:$GPRMC,语句ID,表明该语句为Recommended Minimum Specific GPS/TRANSIT Data(RMC)推荐最小定位信息
字段 1:UTC时间,hhmmss.sss格式
字段 2:状态,A=定位,V=未定位
字段 3:纬度ddmm.mmmm,度分格式(前导位数不足则补0)
字段 4:纬度N(北纬)或S(南纬)
字段 5:经度dddmm.mmmm,度分格式(前导位数不足则补0)
字段 6:经度E(东经)或W(西经)
字段 7:速度,节,Knots(一节也是1.852千米/小时)
字段 8:方位角,度(二维方向指向,相当于二维罗盘)
字段 9:UTC日期,DDMMYY格式
字段10:磁偏角,(000 - 180)度(前导位数不足则补0)
字段11:磁偏角方向,E=东,W=西
字段12:模式,A=自动,D=差分,E=估测,N=数据无效(3.0协议内容)
字段13:校验值
2、配置
使用STM32F103C8T6的串口1,连接模块的串口。
此模块4个引脚标注为“V G T R”

功能:
V = 3.3V
G = GND
T = TX
R = RX
STM32CUBE配置如下:
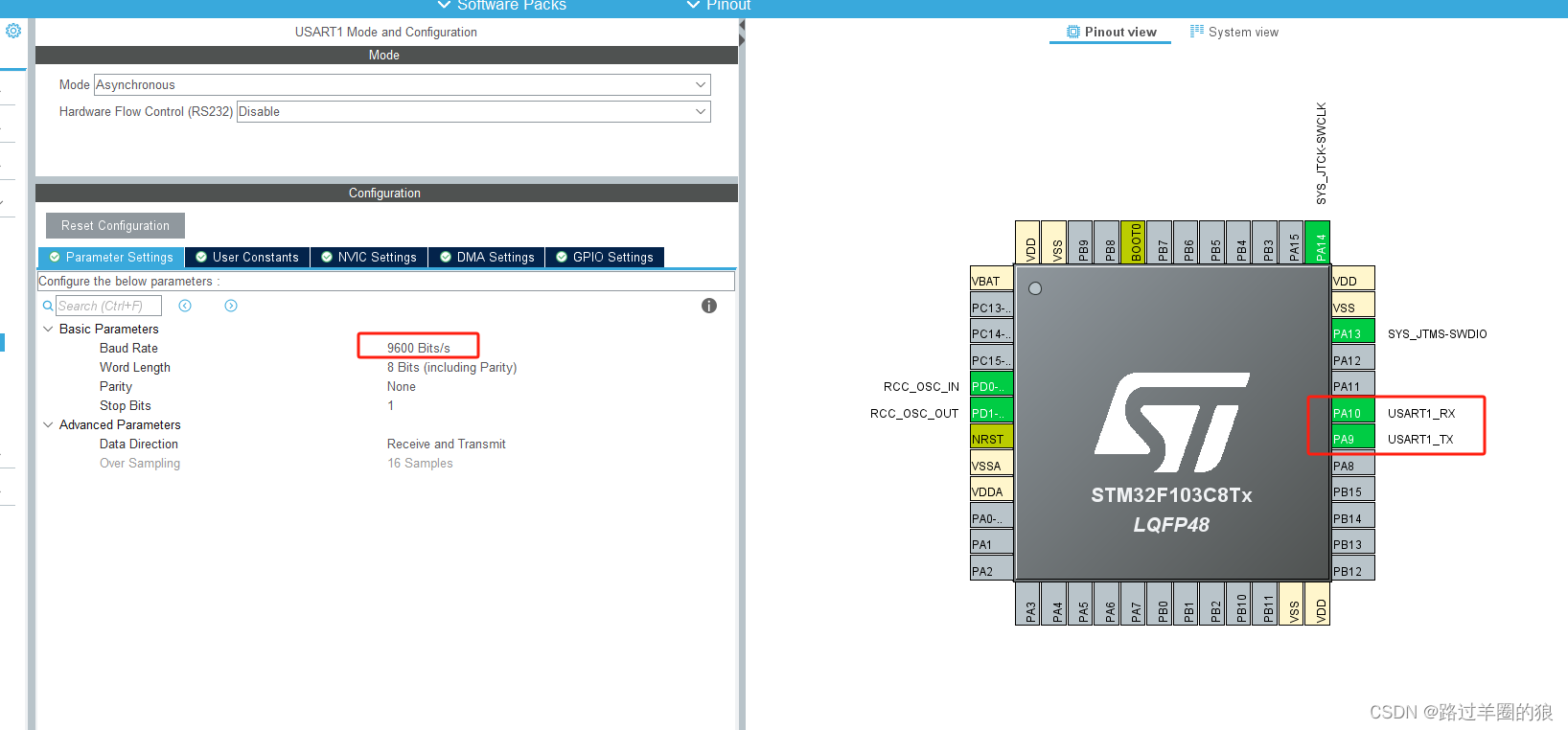
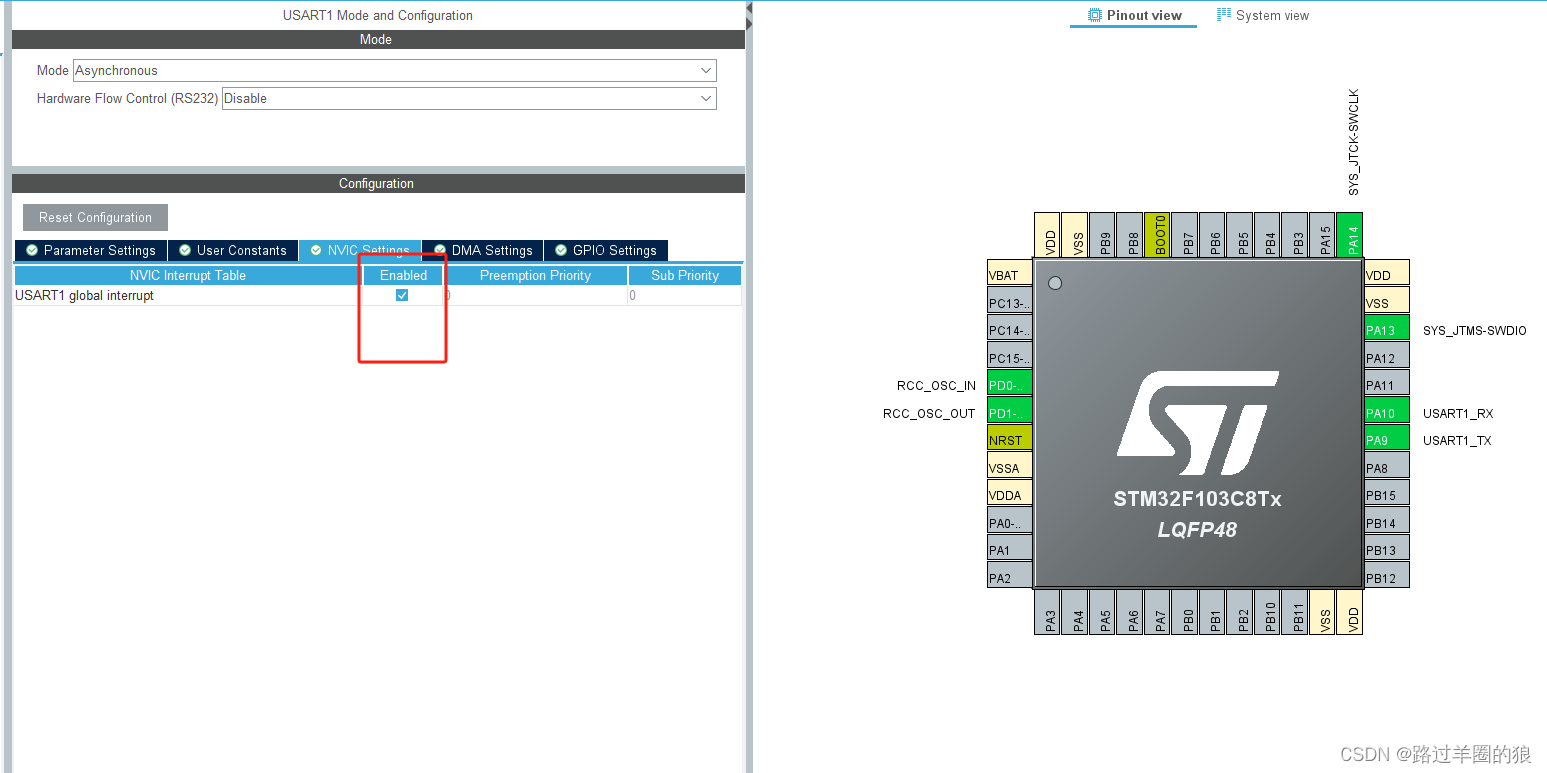
记得开启串口中断。
3、程序编写
1、先使用单字节接收方式,因为每个帧的结构都是$开头,0x0d,0x0a结尾。如果使用空闲接收的话,这个模块一次发送的数据比较大,需要大几百字节的缓存。
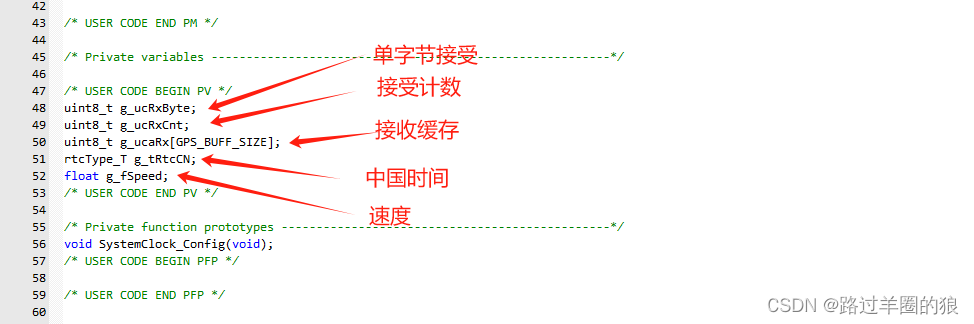
首先在main函数中,先定义需要的全局变量
uint8_t g_ucRxByte;
uint8_t g_ucRxCnt;
uint8_t g_ucaRx[GPS_BUFF_SIZE];
rtcType_T g_tRtcCN;
float g_fSpeed;
2、进入主循环之前,开启串口接收
/* USER CODE BEGIN 2 */HAL_UART_Receive_IT(&huart1,&g_ucRxByte,1);/* USER CODE END 2 */
3、编写GPS.h头文件
#ifndef __GPS_H
#define __GPS_H
#include "main.h"#define GPS_BUFF_SIZE 100typedef struct
{uint16_t usYear;uint8_t ucMonth;uint8_t ucDay;uint8_t ucHour;uint8_t ucMinute;uint8_t ucSecond;
}rtcType_T;extern uint8_t g_ucaGNRMC[GPS_BUFF_SIZE];
extern uint8_t g_ucGNRMCRxSta;uint8_t GPS_GetTime(char *cpRmc,rtcType_T *tpRTC);/*从RMC(推荐最小定位信息)中获取GPS的时间信息,东8区时间*/
rtcType_T GPS_TimeToArea(rtcType_T tTime, uint8_t ucArea);/*转换GPS时间到指定区的时间*/
float GPS_GetSpeed(char *cpRmc);#endif
4、编写GPS.c文件
#include "gps.h"
#include "string.h"
#include "stdlib.h"uint8_t g_ucaGNRMC[GPS_BUFF_SIZE];
uint8_t g_ucGNRMCRxSta;uint8_t GPS_GetTime(char *cpRmc,rtcType_T *tpRTC)
{char *cpStart;uint8_t i;cpStart = strchr(cpRmc,',');tpRTC->ucHour = (cpStart[1]-0x30)*10 + (cpStart[2]-0x30) ;/**/tpRTC->ucMinute = (cpStart[3]-0x30)*10 + (cpStart[4]-0x30);tpRTC->ucSecond = (cpStart[5]-0x30)*10 + (cpStart[6]-0x30);cpStart = cpRmc;for(i = 0;i < 9;i++){cpStart = strchr(cpStart,',');cpStart++;}tpRTC->ucDay = (cpStart[0]-0x30)*10 + (cpStart[1]-0x30);tpRTC->ucMonth = (cpStart[2]-0x30)*10 + (cpStart[3]-0x30);tpRTC->usYear = (cpStart[4]-0x30)*10 + (cpStart[5]-0x30) + 2000;return 1;}rtcType_T GPS_TimeToArea(rtcType_T tTime, uint8_t ucArea)
{rtcType_T tConvertTime;tConvertTime = tTime;tConvertTime.ucHour += ucArea;if(1==tConvertTime.ucMonth||3==tConvertTime.ucMonth||5==tConvertTime.ucMonth||7==tConvertTime.ucMonth||8==tConvertTime.ucMonth||10==tConvertTime.ucMonth||12==tConvertTime.ucMonth)//1,3,5,7,8,9,12月每月为31天{if(24 <= tConvertTime.ucHour){tConvertTime.ucHour -= 24;tConvertTime.ucDay += 1;//如果超过24小时,减去24小时,后再加上一天if(tConvertTime.ucDay > 31){tConvertTime.ucDay -= 31;tConvertTime.ucMonth += 1;}//如果超过31一天,减去31天,后加上一个月}}else if(4==tConvertTime.ucMonth||6==tConvertTime.ucMonth||9==tConvertTime.ucMonth||11==tConvertTime.ucMonth)//4,6,9,11月每月为30天{if(24 <= tConvertTime.ucHour){tConvertTime.ucHour -= 24;tConvertTime.ucDay += 1;//如果超过24小时,减去24小时,后再加上一天if(30 < tConvertTime.ucDay){tConvertTime.ucDay -= 30;tConvertTime.ucMonth += 1;}//如果超过30一天,减去30天,后加上一个月}}else//剩下为2月,闰年为29天,平年为28天{if(24 <= tConvertTime.ucHour){tConvertTime.ucHour -= 24;tConvertTime.ucDay += 1;if((0 == tConvertTime.usYear%400)||(0 == tConvertTime.usYear%4 && 0 != tConvertTime.usYear%100))//判断是否为闰年,年号能被400整除或年号能被4整除,而不能被100整除为闰年{if(29 < tConvertTime.ucDay){tConvertTime.ucDay -= 29;tConvertTime.ucMonth += 1;}}//为闰年else{if(28 < tConvertTime.ucDay){tConvertTime.ucDay -= 28;tConvertTime.ucMonth += 1;}}//为平年}}if(12 < tConvertTime.ucMonth){tConvertTime.ucMonth-=12;tConvertTime.usYear+=1;}return tConvertTime;
}/*GNRMC的第7个字段为速度,节,Knots(一节也是1.852千米/小时)*/
float GPS_GetSpeed(char *cpRmc)
{float fSpeed;char *cpStart,*cpEnd,*ptr;uint8_t i,ucLenth;char caTmp[10];memset(caTmp,0,10);cpStart = cpRmc;for(i = 0;i < 7;i++){cpStart = strchr(cpStart,',');cpStart++;}cpEnd = strchr(cpStart,',');ucLenth = cpEnd - cpStart;memcpy(caTmp,cpStart,ucLenth);caTmp[ucLenth] = '\0';fSpeed = strtof(caTmp,&ptr);fSpeed = fSpeed * 1.852;return fSpeed;
}文件中使用了字符串转浮点数函数,如果不需要速度,可以取消,同时无需包含#include “stdlib.h”
5、返回主函数,进行中断回调函数的编写。
/* USER CODE BEGIN 4 */
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{if(g_ucRxByte == '$'){g_ucRxCnt = 0;}else if(g_ucRxByte == 0x0a)/*一帧结束*/{if(g_ucaRx[0]=='$' && g_ucaRx[4]=='M' && g_ucaRx[5]=='C')/*只提取GNRMC*/{memcpy(g_ucaGNRMC,g_ucaRx,g_ucRxCnt);g_ucGNRMCRxSta = g_ucRxCnt | 0x80;}}g_ucaRx[g_ucRxCnt++] = g_ucRxByte;if(g_ucRxCnt >= GPS_BUFF_SIZE) {g_ucRxCnt = 0;}HAL_UART_Receive_IT(&huart1,&g_ucRxByte,1);
}
/* USER CODE END 4 */
6、使用模块
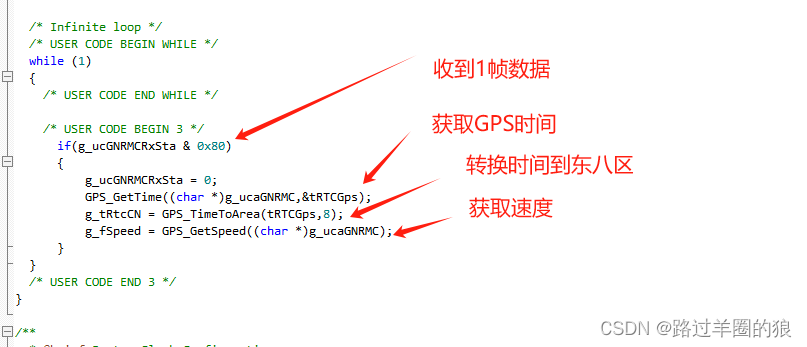
在主循环中,解析获取的GNRMC数据。
/* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */if(g_ucGNRMCRxSta & 0x80){g_ucGNRMCRxSta = 0;GPS_GetTime((char *)g_ucaGNRMC,&tRTCGps);g_tRtcCN = GPS_TimeToArea(tRTCGps,8);g_fSpeed = GPS_GetSpeed((char *)g_ucaGNRMC);}}/* USER CODE END 3 */
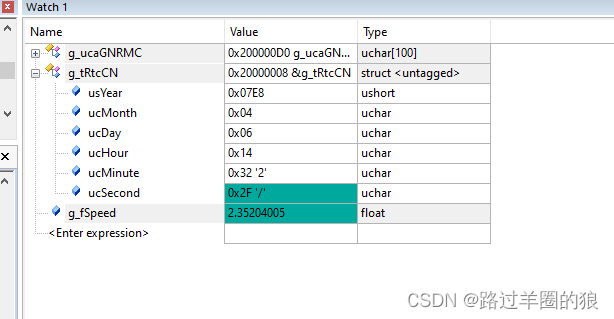
7、结果
4、写在最后
这个模块一般般吧,我把模块放到靠近窗户,定位时有时无,定位成功后,静止状态的速度也会跳动。如果需要获取有效的速度信号,可能需要其他辅助,例如运动检测等判断是否在静止状态。
|直接插入排序)







)



)



)


