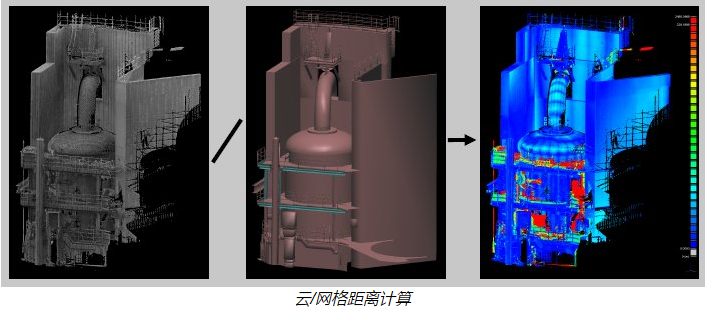
CloudCompare是一个3D点云(和三角网格)处理软件。它最初被设计用于在两个密集的3D点云(例如用激光扫描仪获取的点云)之间或点云和三角形网格之间进行比较。它依赖于专用于此任务的特定八叉树结构。 之后,它已经扩展到一个更通用的点云处理软件,包括许多先进的算法(注册,重新定位,颜色/正常/标量场处理,统计计算,传感器管理,交互式或自动分割,显示增强等)。
下载链接:https://www.cloudcompare.org/
选择安装路径
创建桌面快捷方式
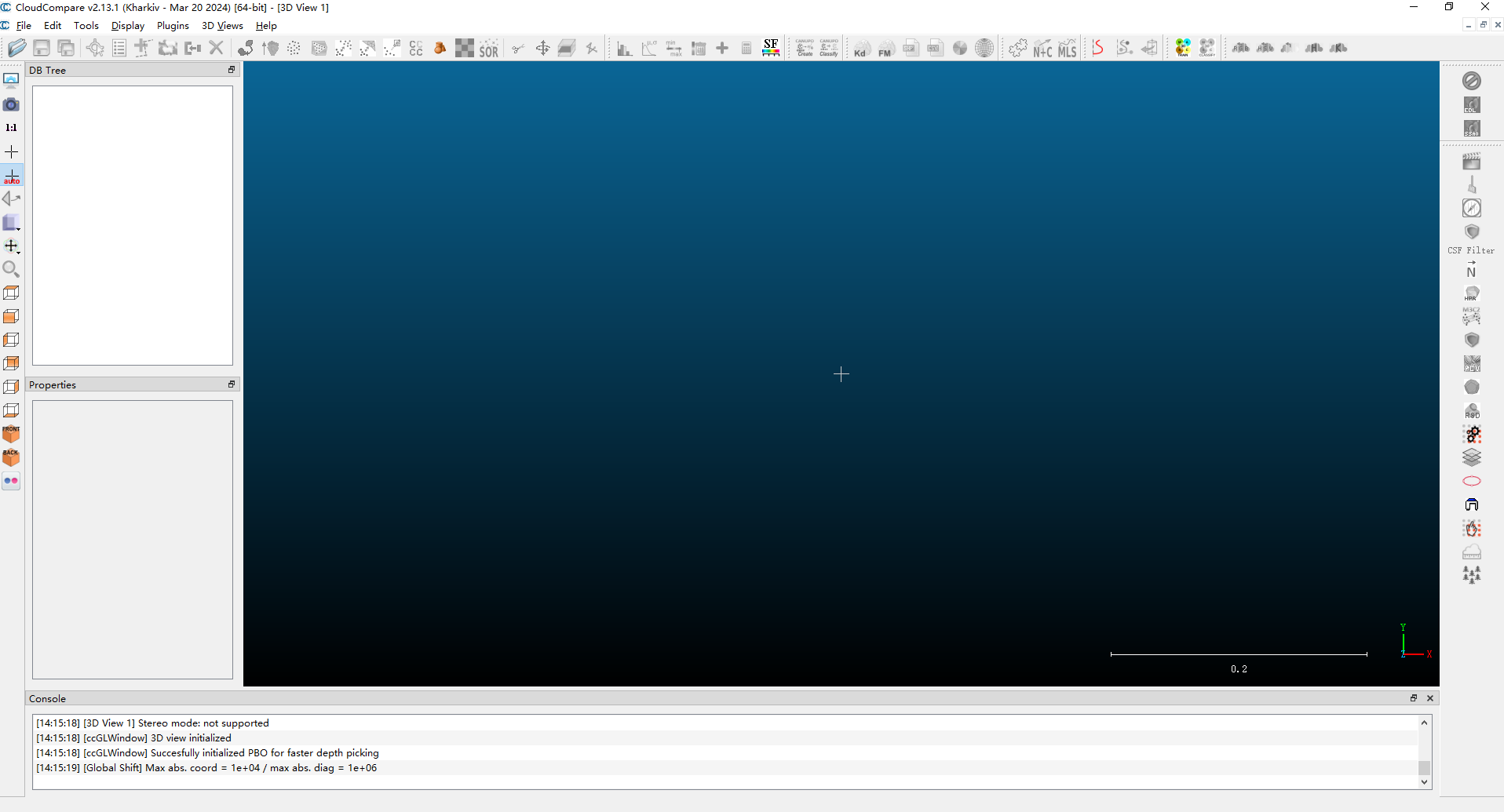
安装完成,打开软件
CloudCompare是一个3D点云(和三角网格)处理软件。它最初被设计用于在两个密集的3D点云(例如用激光扫描仪获取的点云)之间或点云和三角形网格之间进行比较。它依赖于专用于此任务的特定八叉树结构。 之后,它已经扩展到一个更通用的点云处理软件,包括许多先进的算法(注册,重新定位,颜色/正常/标量场处理,统计计算,传感器管理,交互式或自动分割,显示增强等)。
下载链接:https://www.cloudcompare.org/
选择安装路径
创建桌面快捷方式
安装完成,打开软件
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.mzph.cn/news/792119.shtml
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!![[实验报告]--基于端口安全](http://pic.xiahunao.cn/[实验报告]--基于端口安全)













保存数据)




