What is uC/OS-III?
µC/OS-III 的发音为“Micro C O S Three”,这意味着 µC/OS-III 是基于 C 语言编写的第三代
小型操作系统,当然这里所说的第三代是相对于 µC/OS 的前两个版本 µC/OS 和 µC/OS-II 而言
的,后面也会介绍这三个版本的差别。µC/OS/III 是一个操作系统,准确地说应该是一个实时操
作系统,也就是 RTOS(Real Time Operating System),与之类似的 RTOS 还有 FreeRTOS、RTX、
RT-Thread 等.
官方手册,呀,跟github一个鸟样随缘访问,除非。。。。。。
uC/OS-III 的特点
抢占式多任务管理:
uC/OS-III 是一个支持多任务抢占的内核,因此总是优先执行任务优先级高的任务。
时间片调度:
uC/OS-III 允许系统中有多个相同任务优先级的任务,如果系统中处于就绪状态的任务中,优先级最高的任务有多个,那么 µC/OS-III 将以时间片的方式调度任务,即根据用户指定的时间(时间片)轮流调度这些任务。
极短的中断禁用时间:
uC/OS-III 通过锁定任务调度器代替禁用中断来保护一些关键区域(临界区),这确保了 uC/OS-III 能够快速地响应中断。
任务数量不限:
µC/OS-III 理论上支持不受限制的任务数量,但实际上,系统中任务的最大数量受处理器内存空间的限制。
任务优先级数量不限:
uC/OS-III 支持的任务优先级数量不受限制,但对于大多数应用场景而言,使用 32~256 个任务优先级就绰绰有余了。
内核对象数量不限:
uC/OS-III 提供了多种内核对象,如任务、信号量、事件标志、消息队列、软件定时器和内存区等,并且在不考虑处理器内存限制的情况下,用户可以无限制的创建这些内核对象。
时间戳:
uC/OS-III 提供了时间戳功能,用户可以非常方便地测量系统在运行过程中,处理器处理某些事件所消耗的时间,以方便用户对系统进行针对性的优化。自定义钩子函数:µC/OS-III 提供了一些在内核执行操作之前、之后或过程中的钩子函数,这样可以方便用户扩展 µC/OS-III 的功能。
防死锁:uC/OS-III 允许任务在等待某些内核对象前,设置一个等待的最大超时时间,这样
可以有效地防止死锁的发生。
软件定时器:
在 uC/OS-III 中,用户可以创建任意数量的“单次”和“周期”软件定时器,并且每个软件定时器都可以有独立的超时回调函数。
任务内嵌信号量:
uC/OS-III 提供了任务的内嵌信号量功能,这使得任务可以直接获取来自其他任务或中断的信号,而不需要任何的中间内核对象,大大地提高了系统的运行效率。
任务内嵌消息队列:
uC/OS-III 提供了任务的内嵌消息队列,这使得任务可以直接接收来自其他任务或中断的消息,而不需要任何的中间内核对象,大大地提高了系统的运行效率。
临界区
uC/Os-Ill defines one macro for entering a critical section and two macros for leaving(ucos定义了一个进入临界区的函数,两个退出临界区的函数)。
os_CRITICAL_ENTER(); //进入临界区
os_CRITICAL_EXIT(); //退出临界区
os_CRITICALEXIT_NO_SCHED(); //退出街区
任务
任务调度
任务优先级
任务优先级是决定任务调度器如何分配 CPU 使用权的因素之一。每一个任务都被分配一个0~(OS_CFG_PRIO_MAX-1)的任务优先级,并且 uC/OS-III 支持多了任务具有相同的任务优先级,宏 OS_CFG_PRIO_MAX 是在 uC/OS-III 的配置文 os_cfg.h 中定义配置的。在 cpu_cfg.h文件中有宏CPU_CFG_LEAD_ZEROS_ASM_PRESENT,该宏用于配置 µC/OS-III 使用硬件指令的方法或是软件算法的方法计算前导零数量,uC/OS-III 使用位图的方式记录当前系统中存在的所有任务优先级,在 uC/OS-III 系统中存在的最高任务优先级时,就会使用到前导零计数。对于 STM32 而言,STM32 是具有硬件计算前导零的指令的,并且最大支持 32比特位的数,因此宏 OS_CFG_PRIO_MAX 的最大值就是 32。当然,配置系统支持的任务优先级数量越多,系统消耗的资源也就越多,因此读者的实际的工程开发中,应当合理地根据实际需求配置宏 OS_CFG_PRIO_MAX。µC/OS-III 的任务优先级高低与其对应的任务优先级数值是成反比的,也就是说,任务优先级数值为 0 的任务是最高优先级的任务,任务优先级数值为(OS_CFG_PRIO_MAX-1)的任务是优先级最低的任务。如下图 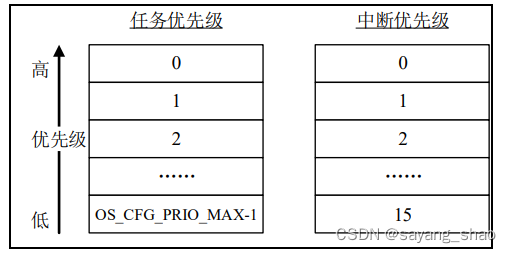
任务调度
任务调度是 uC/OS-III 的一部分,负责确定接下来应该运行哪一个任务。uC/OS-III 是一个
基于任务优先级的抢占式内核,抢占式调度是 uC/OS-III 的主要任务调度方式,并且 uC/OS-III
在抢占式调度的基础上还支持时间片调度,接下来分别介绍这两种任务调度方式。
抢占式
在 uC/OS-III 中,每一个任务都会根据其重要性被分配一个任务优先级,重要性高的任务分配到的任务优先级高,任务优先级高的任务就能够抢占任务优先级低的任务,从而获得 CPU的使用权。在抢占式调度中,如果一个具有高任务优先级的任务因等待某一事件而被挂起后,CPU 的使用权会交给任务优先级低的任务,此时,只要任务优先级高的任务等待的事件发生,那么uC/OS-III 会立即挂起正在运行的低任务优先级的任务,而去处理任务优先级高的任务,这一过程就是抢占的过程。
同样的如果被挂起的高优先级的任务所等待的事件在中断中发生,那么中断服务函数退出后不会返回任务优先级低的任务运行,而是会直接返回任务优先级高的任务去运行。抢占式调度主要是针对任务优先级不同的任务,每一个任务都有一个任务优先级,任务优先级高的任务可以抢占任务优先级低的任务运行,只有当任务优先级高的任务被挂起,低任务优先级的任务才能够运行。
时间片轮转
时间片调度是针对任务优先级相同的任务而言的,当多个具有相同任务优先级的任务就绪时,任务调度器会根据用户设置的任务时间片轮流地运行这些任务,当然这些任务的运行依然会被任务优先级更高的任务抢占。时间片是以一次系统时钟节拍为单位的,例如uC/OS-III 默认设置的任务时间片为 100,则 uC/OS-III 会在当前任务运行 100 次系统时钟节拍的时间后,切换到另一个相同任务优先级的任务中运行。
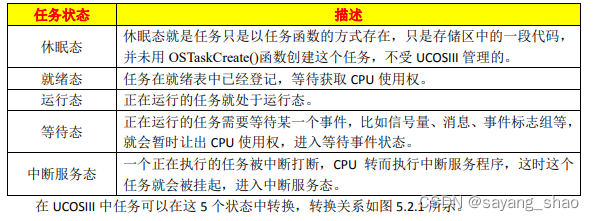
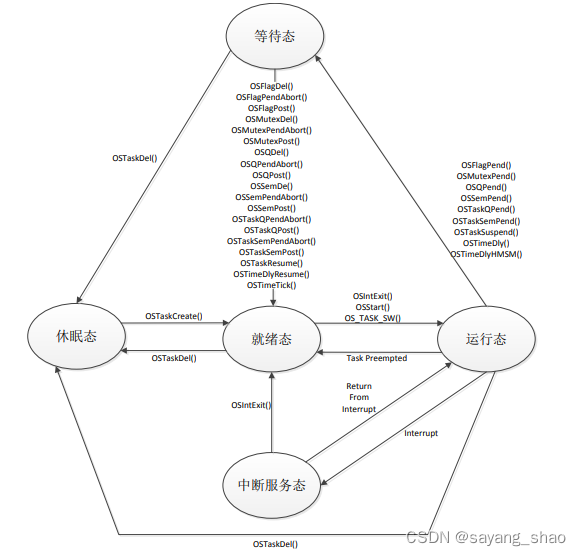
任务状态
任务挂起
************************************************************************************************************************
* SUSPEND A TASK
*
* Description: This function is called to suspend a task. The task can be the calling task if 'p_tcb' is a NULL pointer
* or the pointer to the TCB of the calling task.
*
* Arguments : p_tcb is a pointer to the TCB to suspend.
* If p_tcb is a NULL pointer then, suspend the current task.
*
* p_err is a pointer to a variable that will receive an error code from this function.
*
* OS_ERR_NONE if the requested task is suspended
* OS_ERR_SCHED_LOCKED you can't suspend the current task is the scheduler is
* locked
* OS_ERR_TASK_SUSPEND_ISR if you called this function from an ISR
* OS_ERR_TASK_SUSPEND_IDLE if you attempted to suspend the idle task which is not
* allowed.
* OS_ERR_TASK_SUSPEND_INT_HANDLER if you attempted to suspend the idle task which is not
* allowed.
*
* Note(s) : 1) This function is INTERNAL to uC/OS-III and your application should not call it.
*
* 2) You should use this function with great care. If you suspend a task that is waiting for an event
* (i.e. a message, a semaphore, a queue ...) you will prevent this task from running when the event
* arrives.
************************************************************************************************************************
任务挂起函数
void OS_TaskSuspend (OS_TCB *p_tcb, //任务TCBOS_ERR *p_err); //错误返回值
任务恢复
/*$PAGE*/
/*
************************************************************************************************************************
* RESUME A SUSPENDED TASK
*
* Description: This function is called to resume a previously suspended task. This is the only call that will remove an
* explicit task suspension.
*
* Arguments : p_tcb Is a pointer to the task's OS_TCB to resume
*
* p_err Is a pointer to a variable that will contain an error code returned by this function
*
* OS_ERR_NONE if the requested task is resumed
* OS_ERR_STATE_INVALID if the task is in an invalid state
* OS_ERR_TASK_RESUME_ISR if you called this function from an ISR
* OS_ERR_TASK_RESUME_SELF You cannot resume 'self'
* OS_ERR_TASK_NOT_SUSPENDED if the task to resume has not been suspended
*
* Returns : none
*
* Note(s) : This function is INTERNAL to uC/OS-III and your application should not call it.
************************************************************************************************************************
*/
任务恢复函数
void OS_TaskResume (OS_TCB *p_tcb,OS_ERR *p_err);
任务删除
/*$PAGE*/
/*
************************************************************************************************************************
* DELETE A TASK
*
* Description: This function allows you to delete a task. The calling task can delete itself by specifying a NULL
* pointer for 'p_tcb'. The deleted task is returned to the dormant state and can be re-activated by
* creating the deleted task again.
*
* Arguments : p_tcb is the TCB of the tack to delete
*
* p_err is a pointer to an error code returned by this function:
*
* OS_ERR_NONE if the call is successful
* OS_ERR_STATE_INVALID if the state of the task is invalid
* OS_ERR_TASK_DEL_IDLE if you attempted to delete uC/OS-III's idle task
* OS_ERR_TASK_DEL_INVALID if you attempted to delete uC/OS-III's ISR handler task
* OS_ERR_TASK_DEL_ISR if you tried to delete a task from an ISR
*
* Note(s) : 1) 'p_err' gets set to OS_ERR_NONE before OSSched() to allow the returned error code to be monitored even
* for a task that is deleting itself. In this case, 'p_err' MUST point to a global variable that can be
* accessed by another task.
************************************************************************************************************************
*/
任务删除函数
void OSTaskDel (OS_TCB *p_tcb,OS_ERR *p_err);
任务控制块
这个系统的TCB是真牛逼,管那么多。
struct os_tcb { CPU_STK *StkPtr; /* 指向任务栈栈顶的指针 */void *ExtPtr; /* 指向用户自定义数据的指针 */CPU_STK *StkLimitPtr; /* 指向任务栈“水位”限制的指针 */#if (OS_CFG_DBG_EN > 0u)CPU_CHAR *NamePtr; /* 指向任务名的指针 */
#endifOS_TCB *NextPtr; /* 指向任务链表中下一个任务控制块的指针 */OS_TCB *PrevPtr; /* 指向任务链表中上一个任务控制块的指针 */
#if (OS_CFG_TICK_EN > 0u)OS_TCB *TickNextPtr; /* 指向 Tick 任务链表中下一个任务控制块的指针 */OS_TCB *TickPrevPtr; /* 指向 Tick 任务链表中上一个任务控制块的指针 */
#endif
#if ( (OS_CFG_DBG_EN > 0u) || \(OS_CFG_STAT_TASK_STK_CHK_EN > 0u) || \(OS_CFG_TASK_STK_REDZONE_EN > 0u))CPU_STK *StkBasePtr; /* 指向任务栈起始地址的指针 */
#endif
#if defined(OS_CFG_TLS_TBL_SIZE) && (OS_CFG_TLS_TBL_SIZE > 0u)OS_TLS TLS_Tbl[OS_CFG_TLS_TBL_SIZE]; /* 任务本地存储数组 */
#endif#if (OS_CFG_DBG_EN > 0u)OS_TASK_PTR TaskEntryAddr; /* 指向任务函数的指针 */void *TaskEntryArg; /* 指向任务函数参数的指针 */
#endifOS_TCB *PendNextPtr; /* 指向挂起态任务链表中下一个任务控制块的指针 */OS_TCB *PendPrevPtr; /* 指向挂起态任务链表中上一个任务控制块的指针 */OS_PEND_OBJ *PendObjPtr; /* 指向所等待内核对象的指针 */OS_STATE PendOn;/* 任务挂起等待内核对象的类型 */OS_STATUS PendStatus; /* 任务挂起的结果 */OS_STATE TaskState; /* 任务当前的状态 */OS_PRIO Prio; /* 任务优先级 */
#if (OS_CFG_MUTEX_EN > 0u)OS_PRIO BasePrio; /* 任务原始优先级 */OS_MUTEX *MutexGrpHeadPtr; /* 指向任务拥有的互斥信号量链表的指针 */
#endif
#if ( (OS_CFG_DBG_EN > 0u) || \(OS_CFG_STAT_TASK_STK_CHK_EN > 0u) || \(OS_CFG_TASK_STK_REDZONE_EN > 0u))CPU_STK_SIZE StkSize; /* 任务栈大小 */
#endifOS_OPT Opt; /* 任务操作选项 */
#if (OS_CFG_TS_EN > 0u)CPU_TS TS; /* 任务时间戳 */
#endif
#if (defined(OS_CFG_TRACE_EN) && (OS_CFG_TRACE_EN > 0u))CPU_INT16U SemID; /* 用于第三方调试工具 */
#endifOS_SEM_CTR SemCtr; /* 用于任务接收信号的计数型信号量 */
#if (OS_CFG_TICK_EN > 0u)OS_TICK TickRemain; /* 任务延时的剩余时钟节拍数 */OS_TICK TickCtrPrev; /* 用于任务周期延时 */
#endif
#if (OS_CFG_SCHED_ROUND_ROBIN_EN > 0u)OS_TICK TimeQuanta; /* 任务时间片 */OS_TICK TimeQuantaCtr; /* 任务剩余时间片 */
#endif
#if (OS_MSG_EN > 0u)void *MsgPtr;/* 指向任务接收到的消息的指针 */OS_MSG_SIZE MsgSize; /* 任务接收到的消息的大小 */
#endif
#if (OS_CFG_TASK_Q_EN > 0u)OS_MSG_Q MsgQ; /* 任务内嵌消息队列 */
#if (OS_CFG_TASK_PROFILE_EN > 0u)CPU_TS MsgQPendTime; /* 消息从发送到接收花费的时间 */CPU_TS MsgQPendTimeMax; /* 消息从发送到接收花费的最长时间 */
#endif
#endif
#if (OS_CFG_TASK_REG_TBL_SIZE > 0u)OS_REG RegTbl[OS_CFG_TASK_REG_TBL_SIZE]; /* 特定于任务的寄存器表 */
#endif
#if (OS_CFG_FLAG_EN > 0u)OS_FLAGS FlagsPend; /* 任务挂起等待的事件标志 */OS_FLAGS FlagsRdy; /* 任务挂起等待但已发生的事件标志 */OS_OPT FlagsOpt; /* 任务挂起等待事件标志的类型 */
#endif
#if (OS_CFG_TASK_SUSPEND_EN > 0u)OS_NESTING_CTR SuspendCtr; /* 记录任务被挂起的嵌套次数 */
#endif
#if (OS_CFG_TASK_PROFILE_EN > 0u)OS_CPU_USAGE CPUUsage; /* 任务的 CPU 使用率 */OS_CPU_USAGE CPUUsageMax; /* 任务最大的 CPU 使用率 */OS_CTX_SW_CTR CtxSwCtr; /* 任务执行次数 */CPU_TS CyclesDelta;/* 任务在任务切换前的运行时间 */CPU_TS CyclesStart; /* 任务启动时的时间戳 */OS_CYCLES CyclesTotal; /* 任务的总运行时间 */OS_CYCLES CyclesTotalPrev; /* 任务上次的总运行时间 */CPU_TS SemPendTime; /* 信号量发出信号所用时间 */CPU_TS SemPendTimeMax; /* 信号量发出信号所用的最大时间 */
#endif
#if (OS_CFG_STAT_TASK_STK_CHK_EN > 0u)CPU_STK_SIZE StkUsed; /* 任务栈已使用量 */CPU_STK_SIZE StkFree; /* 任务栈剩余量 */
#endif#ifdef CPU_CFG_INT_DIS_MEAS_ENCPU_TS IntDisTimeMax; /* 任务关闭中断的最长时间 */
#endif
#if (OS_CFG_SCHED_LOCK_TIME_MEAS_EN > 0u)CPU_TS SchedLockTimeMax; /* 任务锁定任务调度器的最长时间 */
#endif
#if (OS_CFG_DBG_EN > 0u)OS_TCB *DbgPrevPtr; /* 指向用于代码调式的任务链表中上一个任务控制块的指针 */OS_TCB *DbgNextPtr; /* 指向用于代码调试的任务链表中下一个任务控制块的指针 */CPU_CHAR *DbgNamePtr; /* 指向用于代码调试的任务名的指针 */
#endif
#if (defined(OS_CFG_TRACE_EN) && (OS_CFG_TRACE_EN > 0u))CPU_INT16U TaskID; /* 用于第三方调试工具 */
#endif
};
任务栈
对于 uC/OS-III,在创建一个任务前,需要为任务准备好一块内存空间,这一内存空间将作为任务的栈空间进行使用。
用CPU_STK 数据类型来定义任务堆栈,CPU_STK在 cpu.h中有定义,其实CPU_STK就是CPU_INT32U,可以看出一个CPU_STK变量为4字节,因此任务的实际堆栈大小应该为我们定义的4倍。下面代码就是我们定义了一个任务堆栈TASK_STK,堆栈大小为64*4=256字节。
任务的栈占用的是MCU 内部的 RAM,当任务越多的时候,需要使用的栈空间就越大,即需要使用的 RAM空间就越多。一个 MCU 能够支持多少任务,就得看你的 RAM 空间有多少。
创建任务
参数说明
/*$PAGE*/
/*
************************************************************************************************************************
* CREATE A TASK
*
* Description: This function is used to have uC/OS-III manage the execution of a task. Tasks can either be created
* prior to the start of multitasking or by a running task. A task cannot be created by an ISR.
*
* Arguments : p_tcb is a pointer to the task's TCB(任务控制块)
*
* p_name is a pointer to an ASCII string to provide a name to the task.(任务名字)
*
* p_task is a pointer to the task's code (任务函数)
*
* p_arg is a pointer to an optional data area which can be used to pass parameters to
* the task when the task first executes. Where the task is concerned it thinks
* it was invoked and passed the argument 'p_arg' as follows:(任务函数参数)
*
* void Task (void *p_arg)
* {
* for (;;) {
* Task code;
* }
* }
*
* prio is the task's priority. A unique priority MUST be assigned to each task and the
* lower the number, the higher the priority.(任务优先级)
*
* p_stk_base is a pointer to the base address of the stack (i.e. low address).(堆栈基地址)
*
* stk_limit is the number of stack elements to set as 'watermark' limit for the stack. This value
* represents the number of CPU_STK entries left before the stack is full. For example,
* specifying 10% of the 'stk_size' value indicates that the stack limit will be reached
* when the stack reaches 90% full.(任务堆栈预警值)
*
* stk_size is the size of the stack in number of elements. If CPU_STK is set to CPU_INT08U,
* 'stk_size' corresponds to the number of bytes available. If CPU_STK is set to
* CPU_INT16U, 'stk_size' contains the number of 16-bit entries available. Finally, if
* CPU_STK is set to CPU_INT32U, 'stk_size' contains the number of 32-bit entries
* available on the stack.(以元素个数表示的堆栈大小。)
*
* q_size is the maximum number of messages that can be sent to the task(消息数量)
*
* time_quanta amount of time (in ticks) for time slice when round-robin between tasks. Specify 0 to use
* the default.(时间片调度时所占时间)
*
* p_ext is a pointer to a user supplied memory location which is used as a TCB extension.
* For example, this user memory can hold the contents of floating-point registers
* during a context switch, the time each task takes to execute, the number of times
* the task has been switched-in, etc.
*
* opt contains additional information (or options) about the behavior of the task.
* See OS_OPT_TASK_xxx in OS.H. Current choices are:(任务选项)
*
* OS_OPT_TASK_NONE No option selected (没有)
* OS_OPT_TASK_STK_CHK Stack checking to be allowed for the task(堆栈检查)
* OS_OPT_TASK_STK_CLR Clear the stack when the task is created(创建任务时先打扫卫生)
* OS_OPT_TASK_SAVE_FP If the CPU has floating-point registers, save them
* during a context switch.
* OS_OPT_TASK_NO_TLS If the caller doesn't want or need TLS (Thread Local
* Storage) support for the task. If you do not include this
* option, TLS will be supported by default.
*
* p_err is a pointer to an error code that will be set during this call. The value pointer
* to by 'p_err' can be:
*
* OS_ERR_NONE if the function was successful.
* OS_ERR_ILLEGAL_CREATE_RUN_TIME if you are trying to create the task after you called
* OSSafetyCriticalStart().
* OS_ERR_NAME if 'p_name' is a NULL pointer
* OS_ERR_PRIO_INVALID if the priority you specify is higher that the maximum
* allowed (i.e. >= OS_CFG_PRIO_MAX-1) or,
* if OS_CFG_ISR_POST_DEFERRED_EN is set to 1 and you tried
* to use priority 0 which is reserved.
* OS_ERR_STK_INVALID if you specified a NULL pointer for 'p_stk_base'
* OS_ERR_STK_SIZE_INVALID if you specified zero for the 'stk_size'
* OS_ERR_STK_LIMIT_INVALID if you specified a 'stk_limit' greater than or equal
* to 'stk_size'
* OS_ERR_TASK_CREATE_ISR if you tried to create a task from an ISR.
* OS_ERR_TASK_INVALID if you specified a NULL pointer for 'p_task'
* OS_ERR_TCB_INVALID if you specified a NULL pointer for 'p_tcb'
*
* Returns : A pointer to the TCB of the task created. This pointer must be used as an ID (i.e handle) to the task.
************************************************************************************************************************
*/
任务创建函数
void OSTaskCreate (OS_TCB *p_tcb, //任务控制块,由用户自己定义。CPU_CHAR *p_name, //任务名字,字符串形式,这里任务名字最好要与任务函数入口名字一致,方便进行调试。OS_TASK_PTR p_task,//:任务入口函数,即任务函数的名称,需要我们自己定义并且实现。void *p_arg,//任务入口函数形参,不用的时候配置为 0 或者 NULL 即可,p_arg是指向可选数据区域的指针,用于将参数传递给任务,因为任务一旦执行,那必须是在一个死循环中,所以传参只在首次执行时有效。OS_PRIO prio,//任务的优先级,由用户自己定义。CPU_STK *p_stk_base,//指向堆栈基址的指针(即堆栈的起始地址)。CPU_STK_SIZE stk_limit,//设置堆栈深度的限制位置。这个值表示任务的堆栈满溢之前剩余的堆栈容量。例如,指定 stk_size 值的 10%表示将达到堆栈限制,当堆栈达到 90%满就表示任务的堆栈已满。CPU_STK_SIZE stk_size,//任务堆栈大小,单位由用户决定,如果 CPU_STK 被设置为CPU_INT08U,则单位为字节,而如果 CPU_STK 被设置为 CPU_INT16U,则单位为半字,同理,如果 CPU_STK 被设置为 CPU_INT32U,单位为字。在 32 位的处理器下(STM32),一个字等于 4 个字节,那么任务大小就为 APP_TASK_START_STK_SIZE * 4 字节。OS_MSG_QTY q_size,//设置可以发送到任务的最大消息数,按需设置即可。OS_TICK time_quanta,//在任务之间循环时的时间片的时间量(以滴答为单位)。指定 0则使用默认值void *p_ext,//是指向用户提供的内存位置的指针,用作 TCB 扩展。例如,该用户存储器可以保存浮点寄存器的内容在上下文切换期间,每个任务执行的时间,次数、任务已经切换等。OS_OPT opt,//用户可选的任务特定选项OS_ERR *p_err);//用于保存返回的错误代码。
启动任务和删除任务
删除任务函数
void OSTaskDel (OS_TCB *p_tcb,OS_ERR *p_err);
启动任务函数
void OSStart (OS_ERR *p_err);
系统内部任务
1、空闲任务
void OS_IdleTask (void *p_arg)
2、时钟节拍任务
void OS_TickTask (void *p_arg);
3、统计任务
void OSStatTaskCPUUsageInit (OS_ERR *p_err)
4、定时任务
void OS_TmrInit (OS_ERR *p_err);
5、中断服务任务
void OS_IntQTask(void *p_arg);
6、钩子函数
void OSIdleTaskHook(void);
消息队列
后面再写。


)



;二、点击下载视频按钮,视频以压缩包形式下载(但未实现压缩视频))


、HDFS HA、Yarn HA)







)
)
