文章目录
- 奥比中光深度相机(二):PyQt5实现打开深度摄像头功能
- 官方给出的调用深度相机源码
- 环境精炼
- UI界面设计
- 逻辑代码构建
- 槽函数连接
- 提取视频流
- 在界面中显示深度视频流
- 注意
- 关闭相机
- 总体代码
- 效果演示
- 运行main.py代码
- 选择相机
- 打开摄像头
- 关闭摄像头
奥比中光深度相机(二):PyQt5实现打开深度摄像头功能
PyQt5实现打开可见光相机摄像头的功能,我们之前已经介绍过了,具体可参考:https://blog.csdn.net/WYKB_Mr_Q/article/details/129827685
上篇文章中我们介绍了奥比中光深度相机基于Python的环境配置部分。具体可参考:https://blog.csdn.net/WYKB_Mr_Q/article/details/137040226
这篇文章我们在配置好Python环境的基础上,使用PyQt5写个界面,并且设计逻辑,通过点击一个设计好的按钮来打开深度相机。深度相机的打开方法和可见光相机的打开方法略有不同,可见光相机可以利用OpenCV来直接调用,奥比中光深度相机主要是利用官方给出的SDK源码来调用。本文中,我们借鉴官方源码,将调用深度相机的主要代码提取出来,并和我们自己写的代码结合,实现在PyQt5界面中通过点击按钮打开深度相机。
官方给出的调用深度相机源码
官方给出了打开深度相机的Python SDK源码,链接为:https://github.com/orbbec/pyorbbecsdk
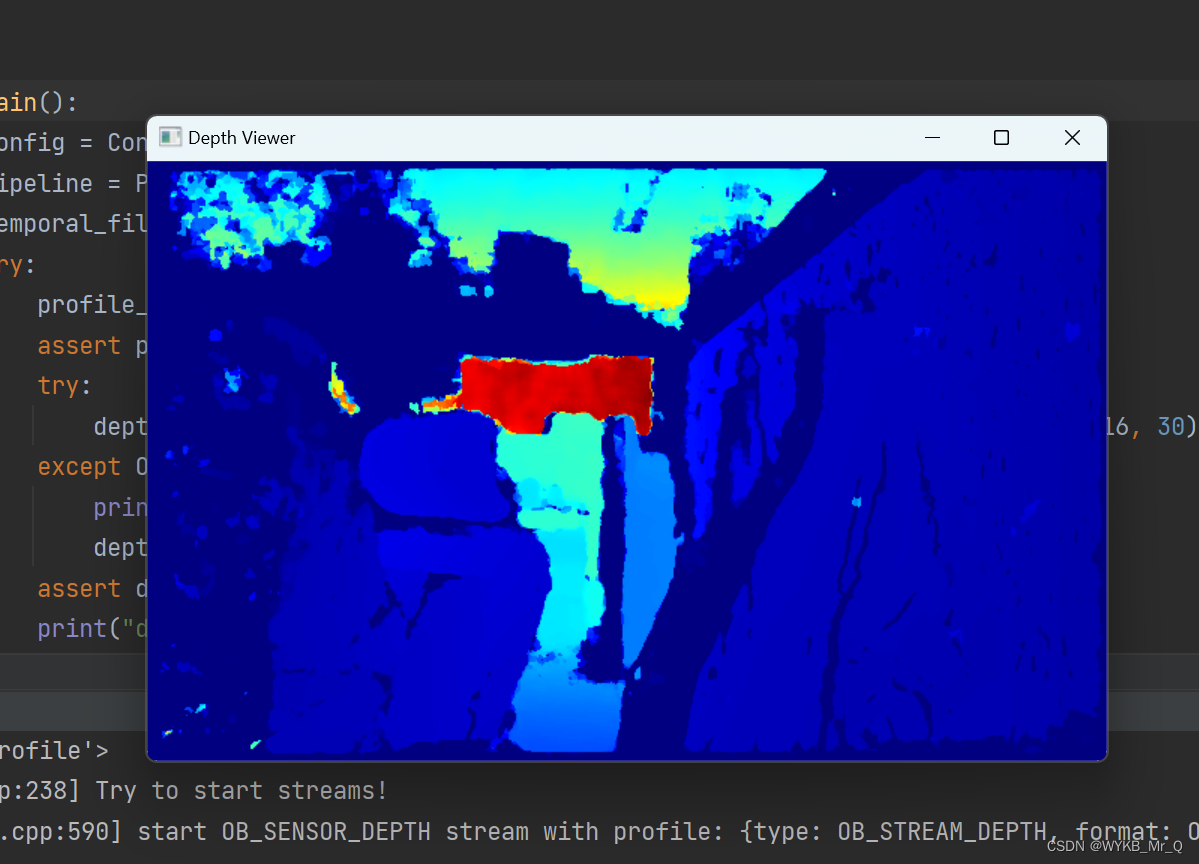
其中也包含了一些.py示例文件,存储在pyorbbecsdk/examples文件夹中,我们找到 “depth_viewer.py” 文件,该文件的主要作用是为了调用深度相机,显示深度图像的。咱们可以先连接上奥比中光深度相机,运行一下该代码试一试,看看是否能够正常运行,展示出深度视频流。如果一切正常,你就可以看到如下界面了。
下面部分是 “depth_viewer.py” 文件的源代码:
from pyorbbecsdk import Pipeline
from pyorbbecsdk import Config
from pyorbbecsdk import OBSensorType, OBFormat
from pyorbbecsdk import OBError
import cv2
import numpy as np
import timeESC_KEY = 27
PRINT_INTERVAL = 1 # seconds
MIN_DEPTH = 20 # 20mm
MAX_DEPTH = 10000 # 10000mm# 管理时间流,这部分不用管
class TemporalFilter:def __init__(self, alpha):self.alpha = alphaself.previous_frame = Nonedef process(self, frame):if self.previous_frame is None:result = frameelse:result = cv2.addWeighted(frame, self.alpha, self.previous_frame, 1 - self.alpha, 0)self.previous_frame = resultreturn resultdef main():# 配置深度相机文件config = Config()pipeline = Pipeline()temporal_filter = TemporalFilter(alpha=0.5)try:# 调用深度摄像头profile_list = pipeline.get_stream_profile_list(OBSensorType.DEPTH_SENSOR)assert profile_list is not Nonetry:# 配置深度视频流参数,包括视频帧长宽,视频流格式,以及每秒采集的视频帧数depth_profile = profile_list.get_video_stream_profile(640, 0, OBFormat.Y16, 30)except OBError as e:print("Error: ", e)depth_profile = profile_list.get_default_video_stream_profile()assert depth_profile is not Noneprint("depth profile: ", type(depth_profile))config.enable_stream(depth_profile)except Exception as e:print(e)returnpipeline.start(config)last_print_time = time.time()while True:try:frames = pipeline.wait_for_frames(100)if frames is None:continuedepth_frame = frames.get_depth_frame()if depth_frame is None:continuewidth = depth_frame.get_width()height = depth_frame.get_height()scale = depth_frame.get_depth_scale()depth_data = np.frombuffer(depth_frame.get_data(), dtype=np.uint16)depth_data = depth_data.reshape((height, width))depth_data = depth_data.astype(np.float32) * scaledepth_data = np.where((depth_data > MIN_DEPTH) & (depth_data < MAX_DEPTH), depth_data, 0)depth_data = depth_data.astype(np.uint16)# Apply temporal filteringdepth_data = temporal_filter.process(depth_data)center_y = int(height / 2)center_x = int(width / 2)center_distance = depth_data[center_y, center_x]current_time = time.time()if current_time - last_print_time >= PRINT_INTERVAL:print("center distance: ", center_distance)last_print_time = current_timedepth_image = cv2.normalize(depth_data, None, 0, 255, cv2.NORM_MINMAX, dtype=cv2.CV_8U)depth_image = cv2.applyColorMap(depth_image, cv2.COLORMAP_JET)cv2.imshow("Depth Viewer", depth_image)key = cv2.waitKey(1)if key == ord('q') or key == ESC_KEY:breakexcept KeyboardInterrupt:breakpipeline.stop()if __name__ == "__main__":main()
我们主要是想将调用奥比中光深度相机的关键部分提取出来,并应用在我们自己的代码中。
环境精炼
由于官方给的SDK源码文件较多,如果全部复制到我们的项目中,显得项目很臃肿。
经过我们不断的尝试和测试,发现如果要正常调用深度相机,正常运行 “depth_viewer.py” 文件,只需要将 “OrbbecSDK.dll” 和 “pyorbbecsdk.pyd” 文件复制出去就可以。
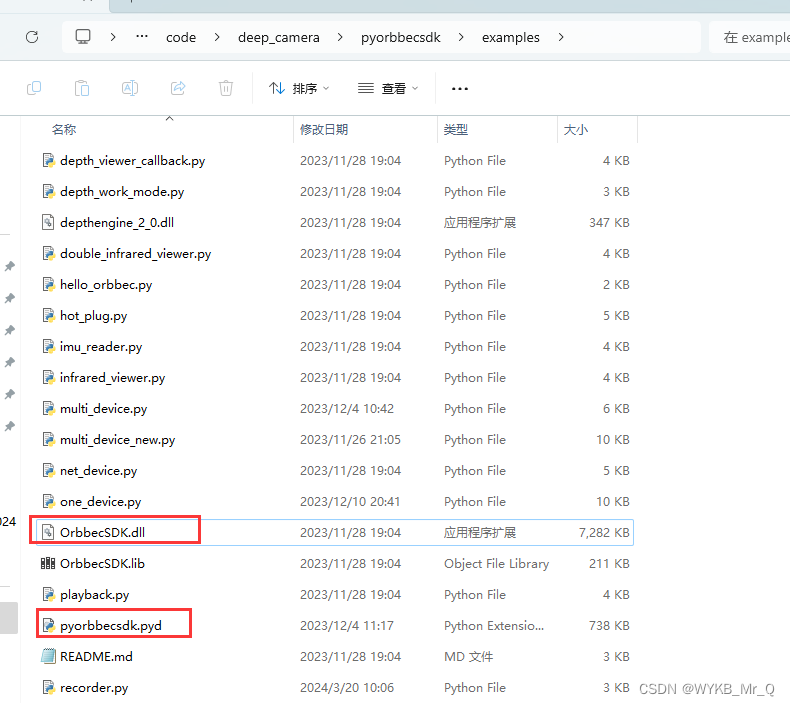
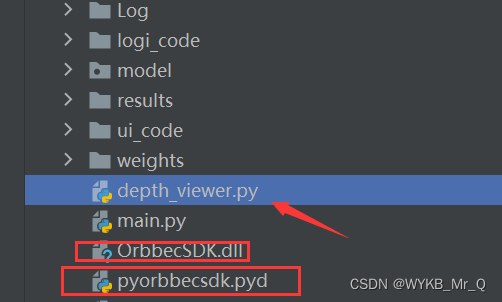
就是下面这三个文件在一个文件夹里,就可以正常调用深度相机了,其余官方提供的文件都可以不要了。这样看起来是不是简单多了?
UI界面设计
这里主要参考我之前的博客,https://blog.csdn.net/WYKB_Mr_Q/article/details/129827685,不再做详细介绍。
我们将构建的ui代码放置到ui_code文件夹里,命名为depth_camera.py,我们这里做一个如下简单的界面做测试:

逻辑代码构建
槽函数连接
通过以下两行代码,实现点击按钮与函数功能的连接。
self.pushButton.clicked.connect(self.open_camera) # 点击第一个按钮运行打开摄像头的函数
self.pushButton_2.clicked.connect(self.close_camera) # 点击第二个按钮运行关闭摄像头的函数
提取视频流
通过以下代码可以实现视频流的调用,并将深度视频帧转化为伪彩色图像。
self.config = Config()
self.pipeline = Pipeline()
# 获取深度摄像头的所有流配置,包括流分辨率、帧速率和帧格式
profile_list = self.pipeline.get_stream_profile_list(OBSensorType.DEPTH_SENSOR)
# 选择分辨率打开流
depth_profile = profile_list.get_video_stream_profile(1280, 800, OBFormat.Y16, 10)
self.config.enable_stream(depth_profile)
self.pipeline.start(self.config)
self.condition = True
while self.condition:try:# 以阻塞方式等待数据帧,数据帧是包含配置中启用的所有流的帧数据的复合帧,并将帧等待超时设置为 100msframes = self.pipeline.wait_for_frames(100)if frames is None:continuedepth_frame = frames.get_depth_frame()if depth_frame is None:continuewidth = depth_frame.get_width()height = depth_frame.get_height()scale = depth_frame.get_depth_scale()depth_data = np.frombuffer(depth_frame.get_data(), dtype=np.uint16)depth_data = depth_data.reshape((height, width))depth_data = depth_data.astype(np.float32) * scaledepth_data = np.where((depth_data > 20) & (depth_data < 10000), depth_data, 0)depth_data = depth_data.astype(np.uint16)# 将数据转化为伪彩色图像depth_image = cv2.normalize(depth_data, None, 0, 255, cv2.NORM_MINMAX, dtype=cv2.CV_8U)depth_image = cv2.applyColorMap(depth_image, cv2.COLORMAP_JET)
在界面中显示深度视频流
我们主要通过保存当前视频帧,并读取展示视频帧的方式显示视频流。以下函数可以实现视频帧保存本地,读取并居中显示到设计好的界面上。
# 展示伪彩色图像功能函数
def show_pic_func(self, jet_image):cv2.imwrite("./read_image_copy.png", jet_image)img = QPixmap("./read_image_copy.png")w = img.width()h = img.height()ratio = max(w / self.label.width(), h / self.label.height())img.setDevicePixelRatio(ratio)self.label.setAlignment(Qt.AlignCenter)self.label.setPixmap(img)
注意
在显示视频帧时,需要调用cv2.waitkey()函数,不然显示出来的视频帧是灰色的,看不到图像。
self.key = cv2.waitKey(1)
if self.key == ord('q') or self.key == 27:break
关闭相机
关闭相机主要依靠pipeline.stop()函数实现,由于我们在打开摄像头时利用了 self.condition 的值,并将其设置为True,因此这里我们需要将其设置为False来终止循环语句。
# 关闭相机
def close_camera(self):self.condition = Falseself.pipeline.stop()# 将相机id设置为Noneself.CAM_NUM = Noneself.pushButton.setEnabled(True)self.pushButton_2.setEnabled(False)
总体代码
注意我们调用了ui界面设计生成的.py文件,命名为depth_camera.py,并放置到ui_code文件夹中,所以我们这里的调用代码为from ui_code.depth_camera import Ui_MainWindow,这里根据自己的命名做对应的更改。
import sys
from pyorbbecsdk import Pipeline
from pyorbbecsdk import Config
from pyorbbecsdk import OBSensorType, OBFormat
from pyorbbecsdk import OBError
from PyQt5.QtWidgets import *
from PyQt5.QtGui import *
from PyQt5.QtCore import *
import cv2
import numpy as np
import time
from ui_code.depth_camera import Ui_MainWindowclass MainWindow(QMainWindow, Ui_MainWindow):def __init__(self, parent=None):super(MainWindow, self).__init__(parent)# UI界面self.setupUi(self)self.CAM_NUM = 0self.background()self.condition = Nonedef background(self):self.pushButton.clicked.connect(self.open_camera)self.pushButton_2.clicked.connect(self.close_camera)self.pushButton.setEnabled(True)# 初始状态不能关闭摄像头self.pushButton_2.setEnabled(False)# 展示伪彩色图像功能函数def show_pic_func(self, jet_image):cv2.imwrite("./read_image_copy.png", jet_image)img = QPixmap("./read_image_copy.png")w = img.width()h = img.height()ratio = max(w / self.label.width(), h / self.label.height())img.setDevicePixelRatio(ratio)self.label.setAlignment(Qt.AlignCenter)self.label.setPixmap(img)def temporal_filter(self, frame, alpha, previous_frame=None):if previous_frame is None:result = frameelse:result = cv2.addWeighted(frame, alpha, previous_frame, 1 - alpha, 0)previous_frame = resultreturn resultdef open_camera(self):self.label.setEnabled(True)# 选择相机型号self.CAM_NUM = self.comboBox.currentIndex()# 支持奥比中光相机if self.CAM_NUM == 0:# 可以关闭摄像头self.pushButton_2.setEnabled(True)self.pushButton.setEnabled(False)self.config = Config()self.pipeline = Pipeline()# 获取深度摄像头的所有流配置,包括流分辨率、帧速率和帧格式profile_list = self.pipeline.get_stream_profile_list(OBSensorType.DEPTH_SENSOR)# 选择分辨率打开流depth_profile = profile_list.get_video_stream_profile(1280, 800, OBFormat.Y16, 10)self.config.enable_stream(depth_profile)self.pipeline.start(self.config)self.condition = Truewhile self.condition:try:# 以阻塞方式等待数据帧,数据帧是包含配置中启用的所有流的帧数据的复合帧,并将帧等待超时设置为 100msframes = self.pipeline.wait_for_frames(100)if frames is None:continuedepth_frame = frames.get_depth_frame()if depth_frame is None:continuewidth = depth_frame.get_width()height = depth_frame.get_height()scale = depth_frame.get_depth_scale()depth_data = np.frombuffer(depth_frame.get_data(), dtype=np.uint16)depth_data = depth_data.reshape((height, width))depth_data = depth_data.astype(np.float32) * scaledepth_data = np.where((depth_data > 20) & (depth_data < 10000), depth_data, 0)depth_data = depth_data.astype(np.uint16)# Apply temporal filteringdepth_data = self.temporal_filter(depth_data, alpha=0.5)depth_image = cv2.normalize(depth_data, None, 0, 255, cv2.NORM_MINMAX, dtype=cv2.CV_8U)depth_image = cv2.applyColorMap(depth_image, cv2.COLORMAP_JET)# 展示伪彩色深度图像self.show_pic_func(depth_image)self.key = cv2.waitKey(1)if self.key == ord('q') or self.key == 27:breakexcept KeyboardInterrupt:breakelse:QMessageBox.information(self, "警告", "我们暂时仅支持奥比中光,请选择奥比中光相机!", QMessageBox.Ok)# 关闭相机def close_camera(self):self.condition = Falseself.pipeline.stop()self.CAM_NUM = Noneself.pushButton.setEnabled(True)self.pushButton_2.setEnabled(False)if __name__ == "__main__":app = QApplication(sys.argv)main = MainWindow()main.show()sys.exit(app.exec_())效果演示
运行main.py代码
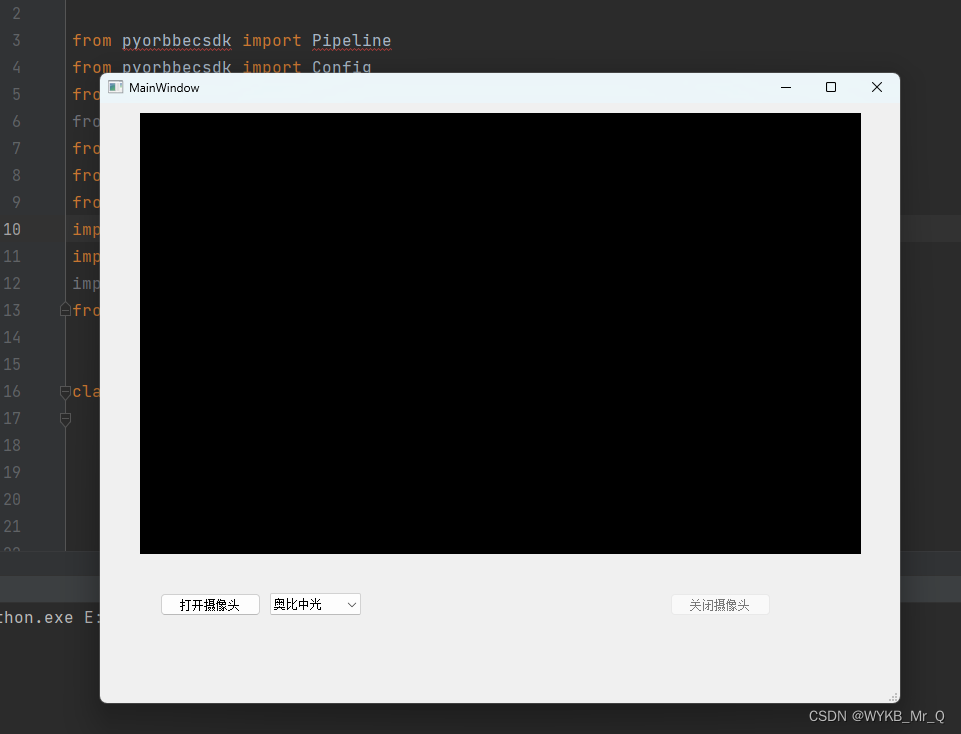
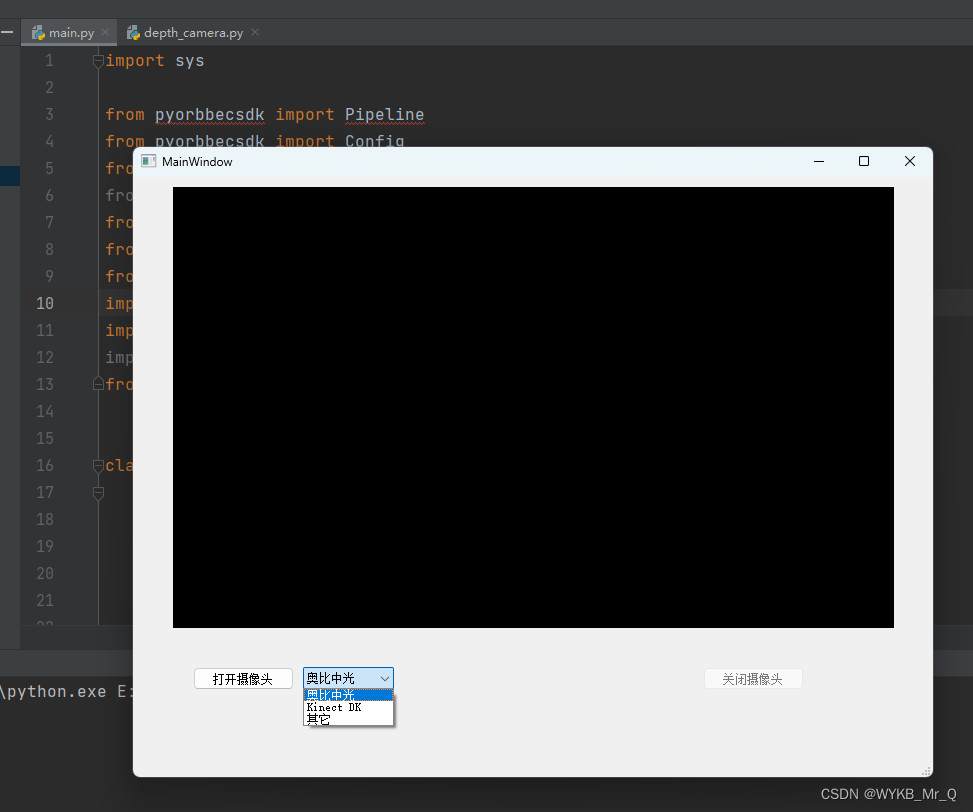
选择相机
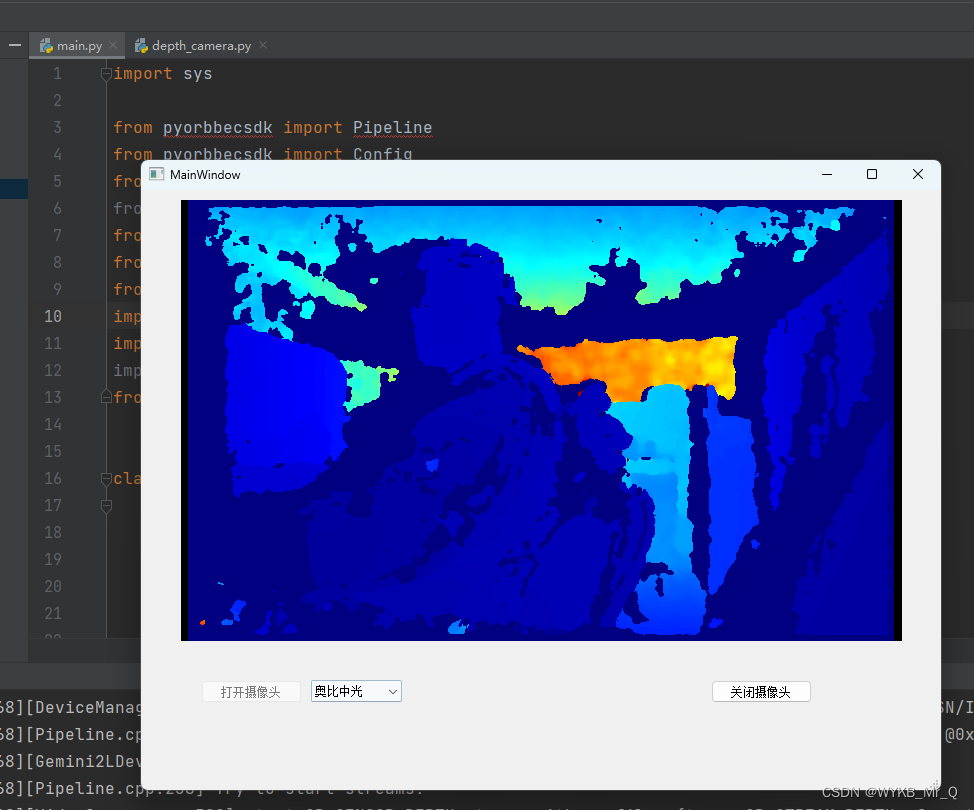
打开摄像头
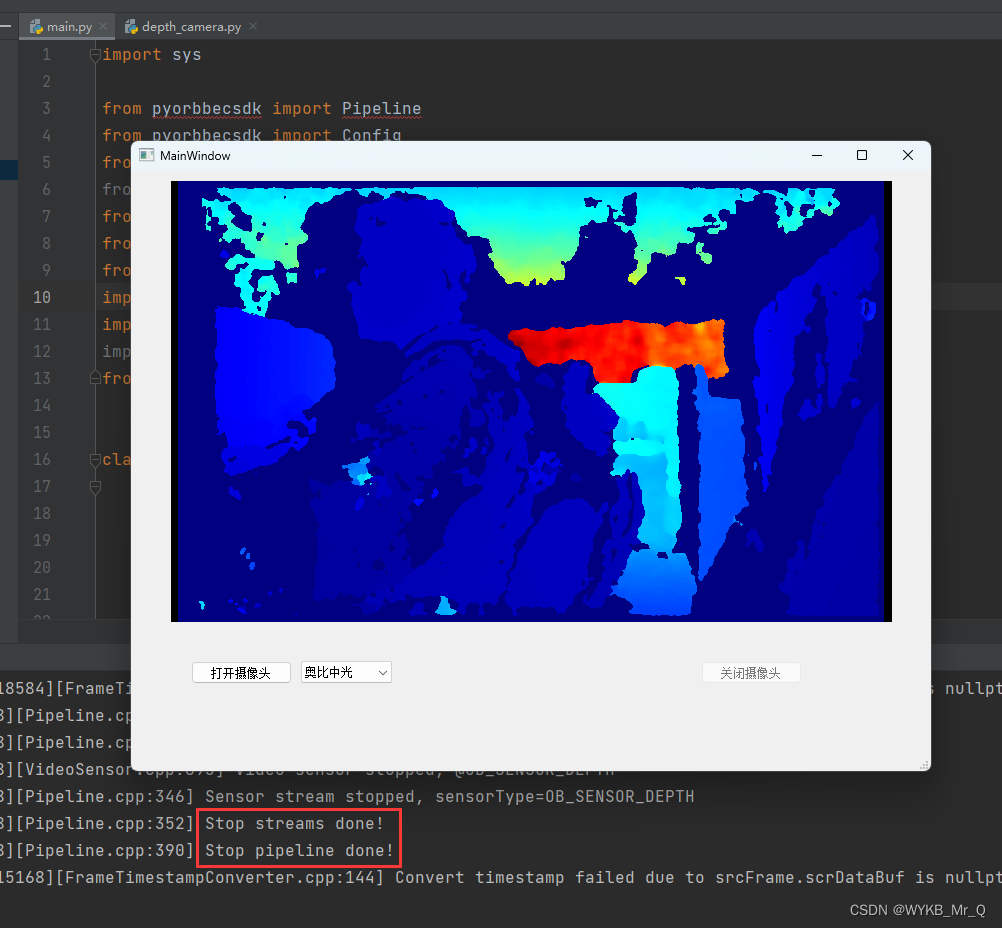
关闭摄像头
该专栏博文地址:
界面开发(1) — PyQt5环境配置
界面开发(2)— 使用PyQt5制作用户登陆界面
界面开发(3)— PyQt5用户登录界面连接数据库
界面开发(4)— PyQt5实现打开图像及视频播放功能
界面开发(5)— PyQt5实现打开摄像头采集视频功能
奥比中光深度相机(一) — 环境配置
日常学习记录,一起交流讨论吧!侵权联系~

)





-聊天室的编写 -01)

)






)


?)