博主简介: 专注、专一于Matlab图像处理学习、交流,matlab图像代码代做/项目合作可以联系(QQ:3249726188)
个人主页:Matlab_ImagePro-CSDN博客
原则:代码均由本人编写完成,非中介,提供有偿Matlab算法代码编程服务,不从事不违反涉及学术原则的事。
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
本次分享的是基于傅里叶描述子的手势动作识别算法,用matlab实现。(有疑问或者想交流细节的QQ:3249726188)
一、案例背景介绍
前期博主分享了目标识别等相关算法,前期博文链接如下:
基于Matlab的视频人体动作识别(基于Matlab的视频人体动作识别,Matlab实现-CSDN博客)
基于LBP和KNN的人面表情识别(基于LBP和KNN的人面表情识别,Matlab实现-CSDN博客)
这次介绍的手势动作识别算法,基于傅里叶描述子的手势动作识别算法。
二、算法原理概述
基于傅里叶描述子的手势动作识别算法,核心特征就是根据图库情况,分割出手势动作,提取图像的形状特征特征(傅里叶描述子算法),然后通过与训练图库的形状特征进行对比,通过KNN算法进行分类。算法思路比较简单,下面介绍具体算法流程。
三、算法流程
1、读取待识别图像,并转换为HSV颜色模型
2、通过HSV颜色模型分割出手势二值图
3、根据步骤二的二值图,根据傅里叶描述子算法,获取图像的形状特征
4、根据待识别图和训练库的形状特征,使用KNN算法进行分类,得到识别结果
四、Matlab实现效果
待识别原图:
HSV分割:
去噪二值图:
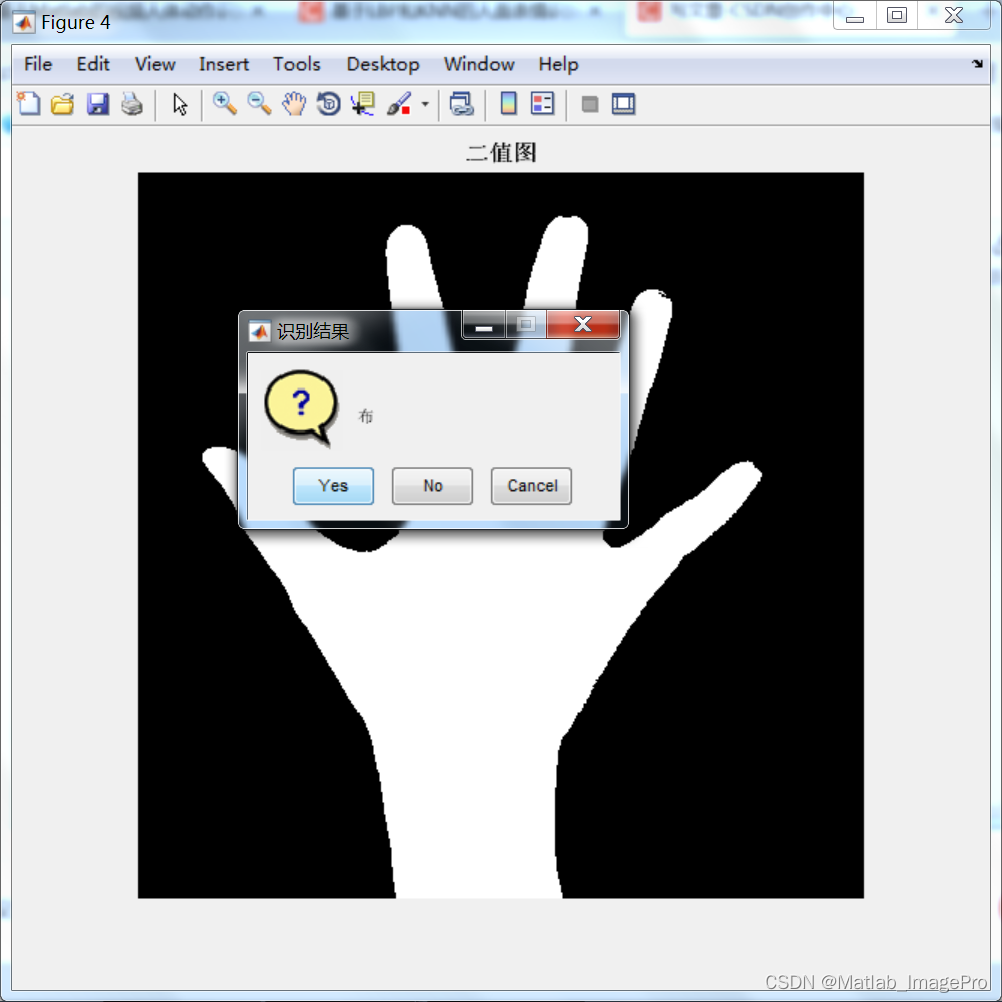
识别结果:
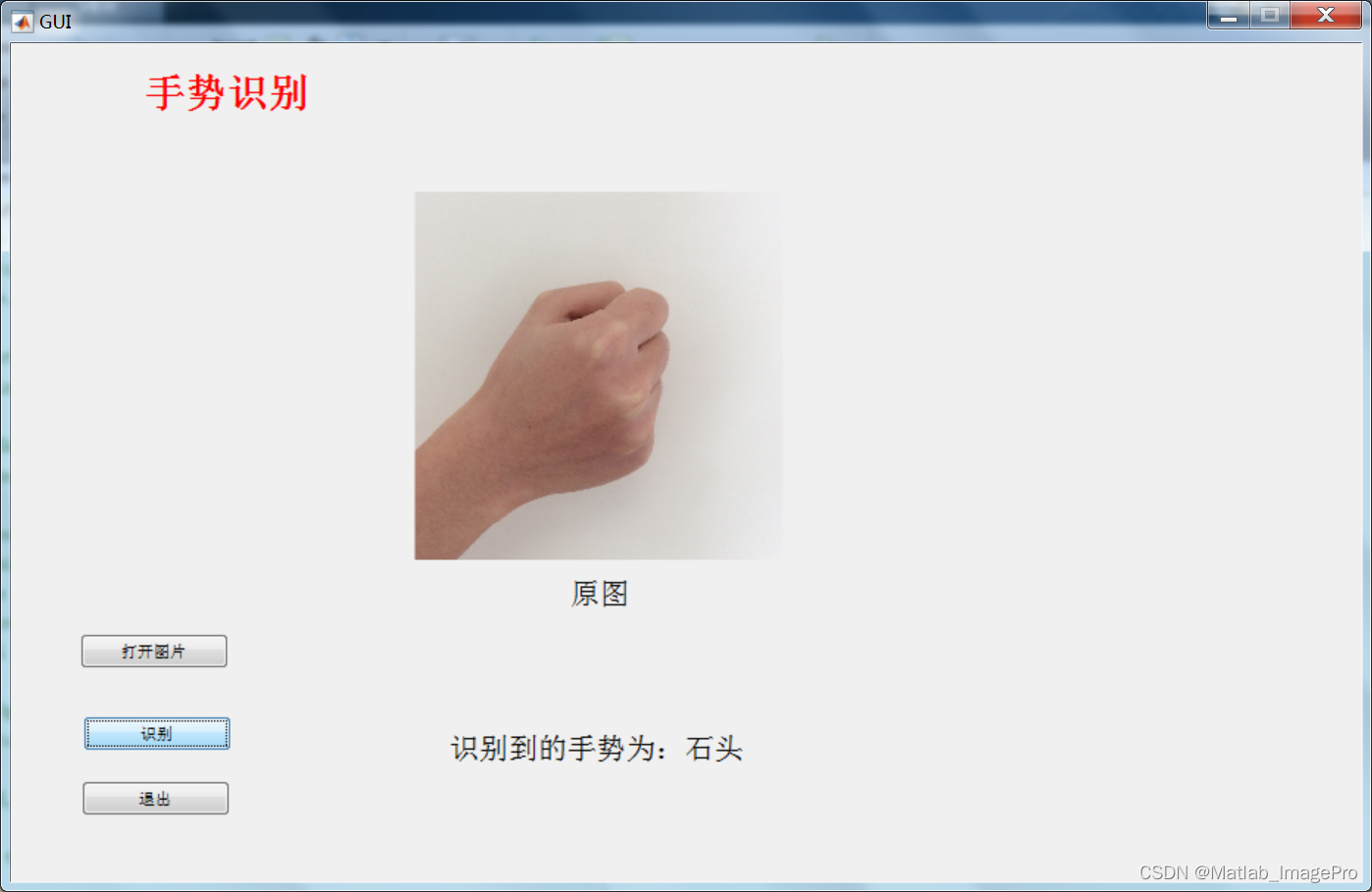
将代码打包到GUI上,测试其他图像的效果:
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
专注、专一于Matlab图像处理学习、交流、代做
QQ:3249726188

)
ffmpeg库的编译)
:Eclipse IDE简介)




——线程的基础使用)



的横向对比)

)
)
)


