文章目录
- 前言
- 一、我们看一下每个按键返回值
- 获取按键返回值的方法
- 二、我们实现一个左摇杆控制平滑移动的功能
- 1、创建一个左摇杆控制移动的脚本
- 2、传入XR Origin对象,并且定义一个公开变量控制移动速度
- 3、获取到摇杆是否移动,以及移动的偏移量
- 4、如果摇杆偏移了,使用摇杆偏移值控制XR Origin移动
- 三、测试代码
前言
在上篇文章中,我们实现了PICO中 隔空取物 和 接触抓取。
- Unity中PICO实现 隔空取物 和 接触抓取物体
在这篇文章中,我们来实现 手柄C#脚本交互。
一、我们看一下每个按键返回值
- 手柄&头戴输入映射

-
按键Unity XR 键值菜单键CommonUsages.menuButton:
表示菜单键的激活状态(即是否被按下)。 -
扳机键CommonUsages.triggerButton:
表示扳机键的激活状态。 -
CommonUsages.trigger:
表示扳机键被按下的程度。例如,在射箭类游戏中,可以表示弓箭的拉满程度。 -
抓握键CommonUsages.gripButton:
表示抓握键的激活状态。 -
CommonUsages.grip:
表示抓握键被按下的程度。例如,在射箭类游戏中,可以表示弓箭的拉满程度。 -
摇杆CommonUsages.primary2DAxisClick:
表示摇杆是否被按下。 -
CommonUsages.primary2DAxis:
表示摇杆的上下左右拨动情况。 -
X/ACommonUsages.primaryButton:
表示 X/A 键的激活状态。 -
Y/BCommonUsages.secondaryButton:
表示 Y/B 键的激活状态。
获取按键返回值的方法
- XRNode.LeftHand 可以修改为 右手柄
- XXX 可以修改为以上的按键类型
- YYY 为按键返回值
InputDevices.GetDeviceAtXRNode(XRNode.LeftHand).
TryGetFeatureValue(XXX,out YYY);
二、我们实现一个左摇杆控制平滑移动的功能
1、创建一个左摇杆控制移动的脚本
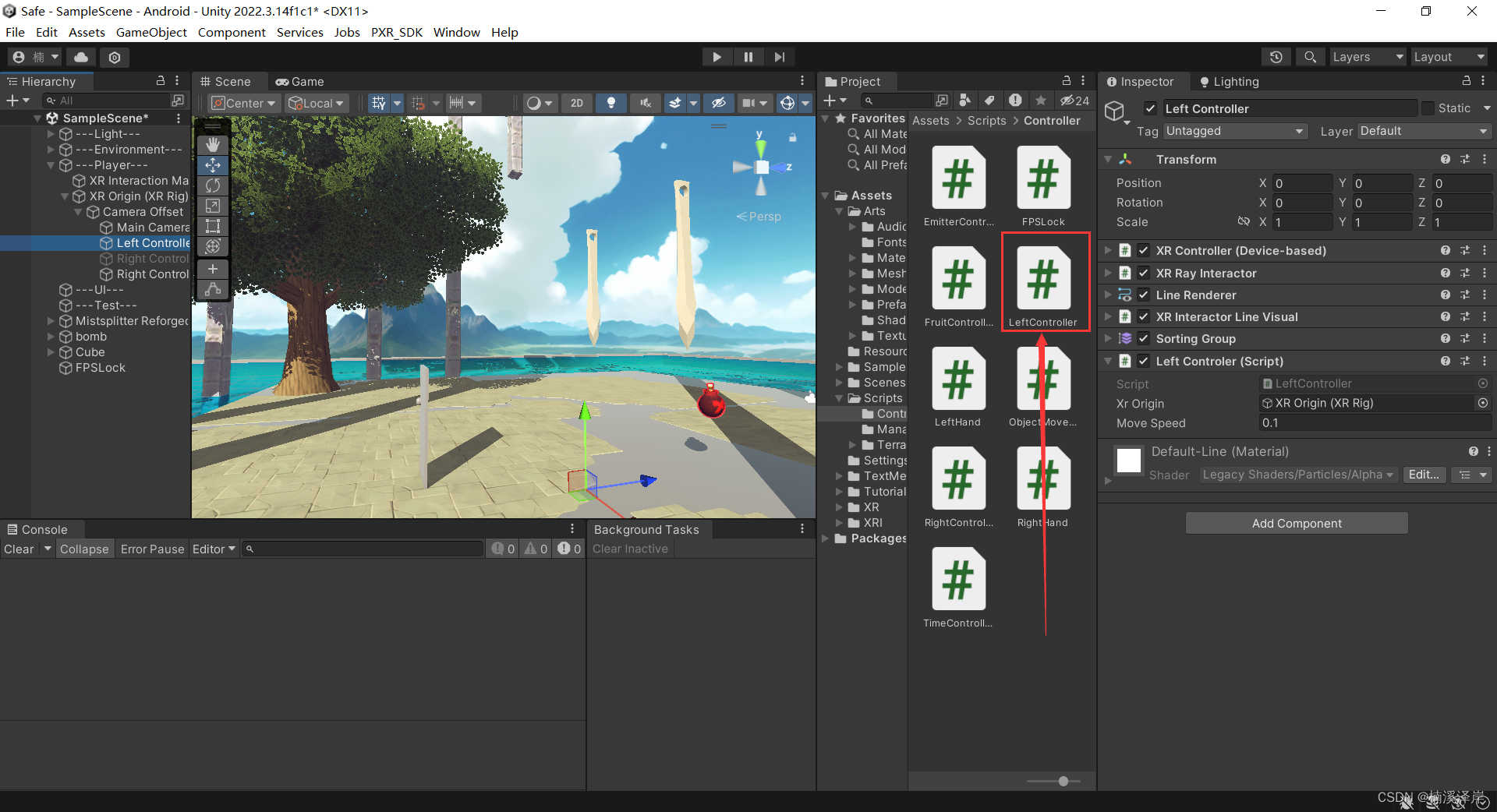
2、传入XR Origin对象,并且定义一个公开变量控制移动速度
public GameObject xrOrigin;
public float moveSpeed = 0.1f;
3、获取到摇杆是否移动,以及移动的偏移量
bool success = InputDevices.GetDeviceAtXRNode(XRNode.LeftHand).
TryGetFeatureValue(CommonUsages.primary2DAxis, out Vector2 result);
4、如果摇杆偏移了,使用摇杆偏移值控制XR Origin移动
- 移动时,保证我们 推动摇杆的前方 一直 为我们视角的前方。
- 所以,使用四元数欧拉角旋转
if (success)
{
Vector3 position = xrOrigin.transform.position;
//使用四元数欧拉角旋转控制移动,让移动的前方一直朝向摄像机的前方
Vector3 direction = new Vector3(result.x, 0, result.y);
float y = Camera.main.transform.rotation.eulerAngles.y;
direction = Quaternion.Euler(0, y, 0) * direction;
xrOrigin.transform.position = position + direction * moveSpeed;
}
三、测试代码
using UnityEngine;
using UnityEngine.XR;
using UnityEngine.XR.Interaction.Toolkit;public class LeftController : MonoBehaviour
{public GameObject xrOrigin;public float moveSpeed = 0.1f;void Update(){MoveFun();}//手柄控制移动void MoveFun(){bool success = InputDevices.GetDeviceAtXRNode(XRNode.LeftHand).TryGetFeatureValue(CommonUsages.primary2DAxis, out Vector2 result);if (success){Vector3 position = xrOrigin.transform.position;//使用四元数欧拉角旋转控制移动,让移动的前方一直朝向摄像机的前方Vector3 direction = new Vector3(result.x, 0, result.y);float y = Camera.main.transform.rotation.eulerAngles.y;direction = Quaternion.Euler(0, y, 0) * direction;xrOrigin.transform.position = position + direction * moveSpeed;}}
}






)











