专栏导读
- 作者简介:工学博士,高级工程师,专注于工业软件算法研究
- 本文已收录于专栏:《有限元编程从入门到精通》本专栏旨在提供 1.以案例的形式讲解各类有限元问题的程序实现,并提供所有案例完整源码;2.单元类型包含:杆单元,梁单元,平面三角形单元,薄板单元,厚板单元,壳单元,四/六面体实体单元,金字塔单元等;3.物理场问题涉及:力学、传热学、电磁学及多物理场耦合等问题的稳态(静力学)和瞬态(动力学)求解。专栏旨在帮助有志于有限元工业软件开发的小伙伴,快速上手有限元编程,在案例中成长,摆脱按部就班填鸭式教学。
- 【所有专栏文章均提供对应视频课】,文本教程+视频教程,双向强化学习!
- 欢迎订阅专栏,订阅用户可私聊进入有限元编程交流群(知识交流、问题解答),并获赠丰厚的有限元相关学习资料(教材、源码、视频课)
- 专栏订阅地址:有限元编程从入门到精通_suoge223的博客-CSDN博客
文章目录
-
目录
专栏导读
文章目录
【总体简介】💻🔍
【代码截图】
【理论文本截图】
【总体简介】💻🔍
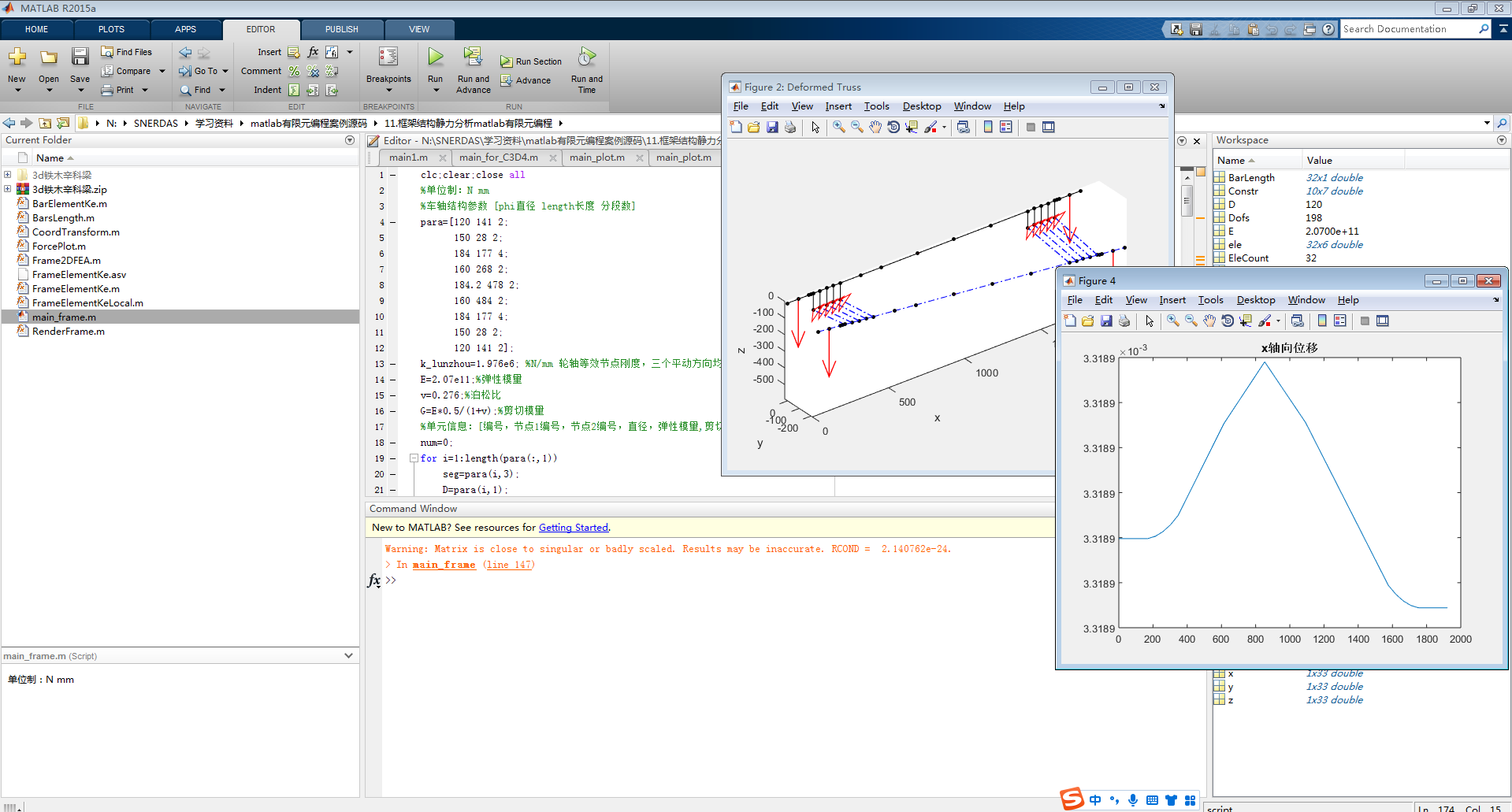
本代码通过matlab实现了三维铁木辛柯梁单元和弹性支撑单元的有限元编程,采用 Timoshenko 梁理论,通过截面剪切系数考虑梁截面的剪切变形影响。三维铁木辛柯梁单元是由3 个节点构成的直梁单元,其示意图见图 1-1。其中,o-xyz 为梁单元局部坐标系;节点i、j为单元物理节点,用于确定单元边界,为必选节点:节点k为单元梁截面主轴方向节点,用于确定梁截面主轴Z 的指向,为可选节点,当不设置 3 号节点时,梁的截面主轴将按照梁截面绕梁轴线的转角进行确认。三维铁木辛柯梁单元每个节点包含 6 个位移自由度,分别为沿单元局部坐标x、y、z轴的平动自由度 u、v、w,以及绕单元局部坐标x、y、z轴的转动自由度 。
你将获得:三维铁木辛柯梁matlab有限元程序源码+程序理论文本doc文件
获取地址:三维铁木辛柯梁Matlab有限元编程 | 弹簧支座 | 弹性支撑单元| Matlab源码 | 理论文本
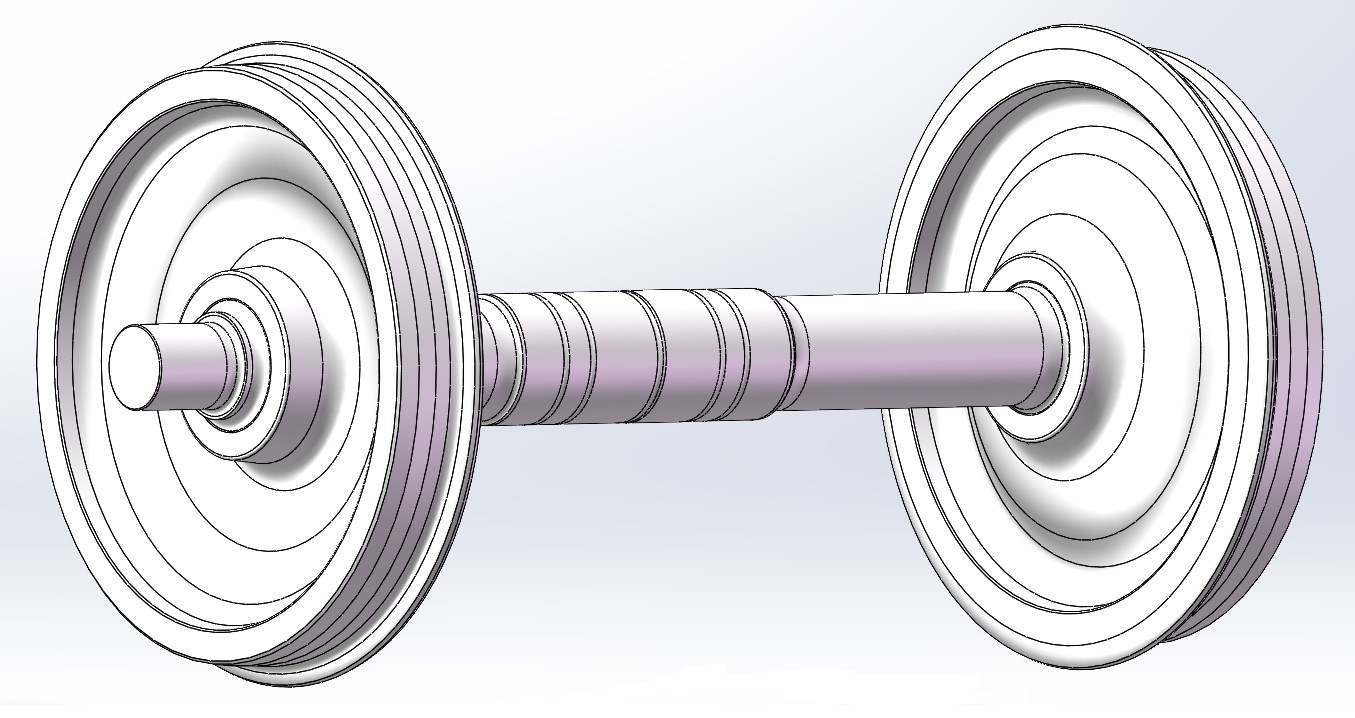
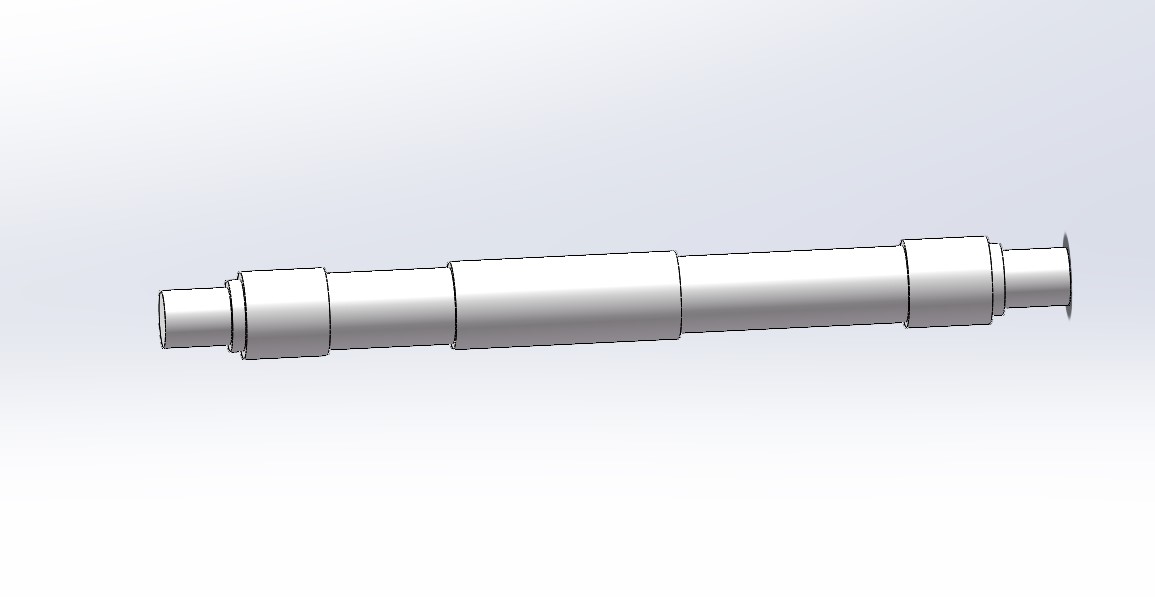
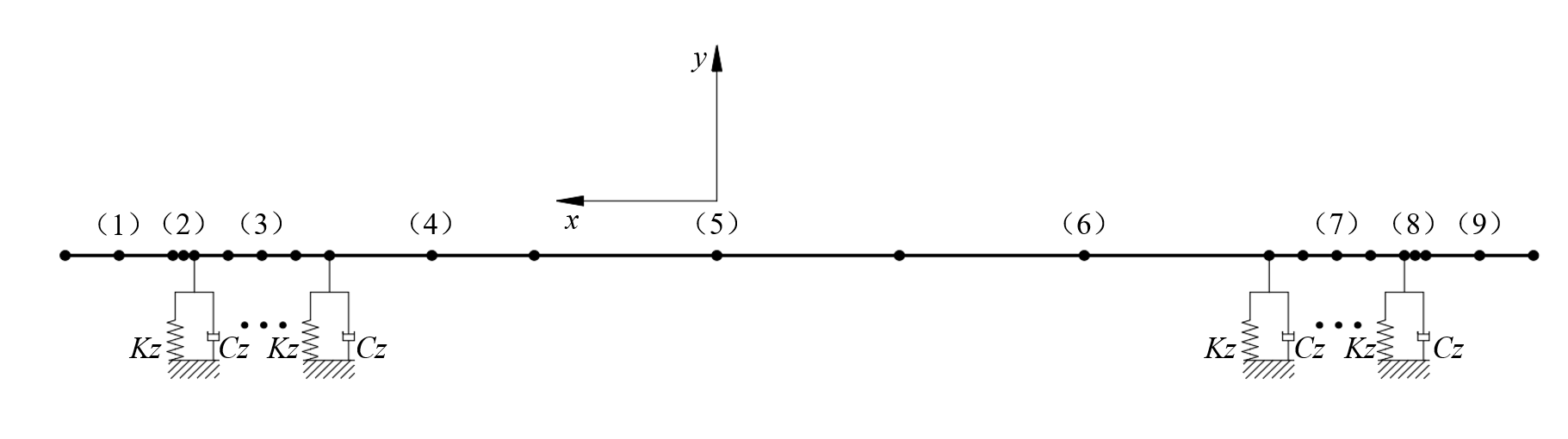
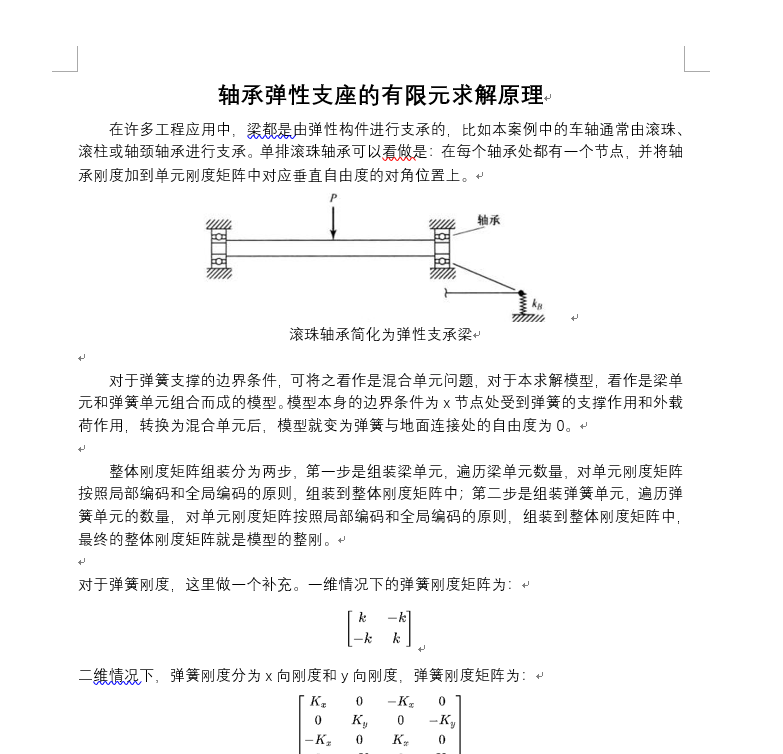
程序实现的案例为列车轮轴的静力分析,将车轴简化如图2所示。将轮对主轴简化为圆截面的空间三维Timoshenko梁单元如图4所示,将车轮简化为轴承支撑单元。车轴为阶梯轴,按照截面大小不同,将车轴划分为几个不同截面面积的梁单元组合,另外为了得到轮轴过盈配合连接处精确的位移,在车轮车轴连接处建立多个节点,连接处节点单元均使用轴承支撑单元,即弹性支撑单元。因此本代码还涉及弹性支撑单元的有限元编程。
(如需交流,请私信我^.^)

【代码截图】

【理论文本截图】







)




)
关于支付total和payer_total差异的情况处理)






