1--核心代码
6D位姿一般指平移向量和旋转向量,Maya软件中关节点的6D位姿指的是相对平移向量和欧拉旋转向量;
为了按比例融合两个Pose,首先需要将欧拉旋转向量转换为旋转矩阵,在将旋转矩阵转换为四元数,利用球面线性插值实现Pose的融合,融合后的四元数需要重新转换为欧拉旋转向量,整个流程如下:欧拉旋转向量→旋转矩阵→四元数→球面线性插值→旋转矩阵→欧拉旋转向量;
'''
@File : fusion6DPose.py
@Time : 2024/03/14 17:08:00
@Author : Jinfu Liu
@Version : 1.0
@Desc : fusion 6DPose between two motion
'''
import numpy as np
from scipy.spatial.transform import Rotation
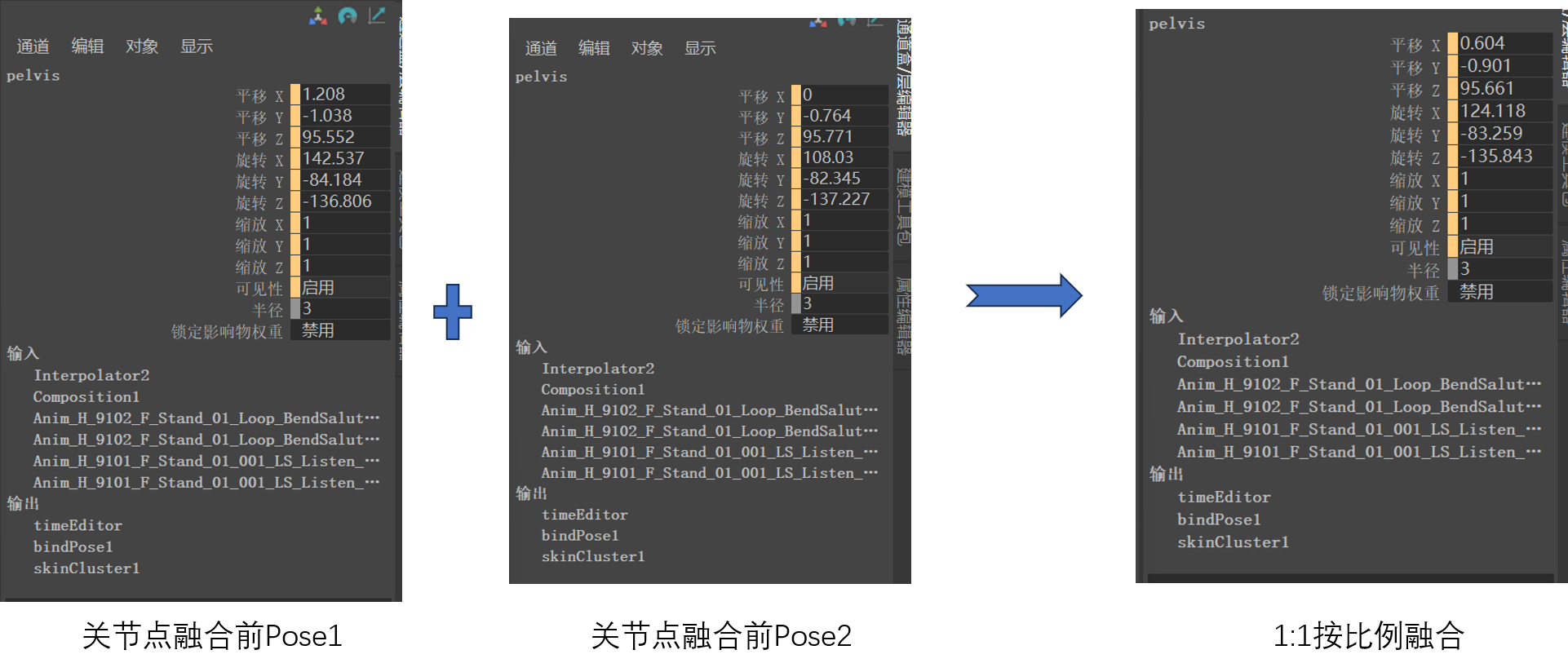
from pyquaternion import Quaterniondef fusion6DPose(pose1:np.ndarray, pose2:np.ndarray, rate:float) -> np.ndarray:'''按比例融合平移向量和欧拉旋转向量'''assert pose1.shape[0] == pose2.shape[0]return_pose = np.zeros_like(pose1) # [num_joint, 6]for joint_idx in range(pose1.shape[0]): # 遍历处理所有关节点T1 = pose1[joint_idx][:3] # 平移向量R1 = pose1[joint_idx][3:] # 欧拉旋转T2 = pose2[joint_idx][:3] # 平移向量R2 = pose2[joint_idx][3:] # 欧拉旋转R1 = Rotation.from_euler('xyz', list(R1), degrees=True).as_matrix() # 欧拉角->旋转矩阵R2 = Rotation.from_euler('xyz', list(R2), degrees=True).as_matrix()T3 = rate * T1 + (1 - rate) * T2Q1 = Rotation.from_matrix(R1).as_quat() # 旋转矩阵->四元数Q2 = Rotation.from_matrix(R2).as_quat()Q3 = Quaternion.slerp(Quaternion(Q1), Quaternion(Q2), 1-rate) # 球面线性插值R3 = Rotation.from_quat(Q3.elements).as_matrix() # 四元数->旋转矩阵R3 = Rotation.from_matrix(R3).as_euler('xyz', degrees = True) # 旋转矩阵->欧拉角return_pose[joint_idx][:3] = T3return_pose[joint_idx][3:] = R3return return_poseif __name__ == "__main__":# 关节点的6D位姿pose1 = np.array([[1.208, -1.038, 95.552, 142.537, -84.184, -136.806]]) # Tx, Ty, Tz, Rx, Ry, Rz# 关节点的6D位姿pose2 = np.array([[0, -0.764, 95.771, -71.97, -97.655, 42.773]]) # Tx, Ty, Tz, Rx, Ry, Rz# 融合比例alpha = 0.5# 计算融合后的刚体C的6D位姿# Pose3 = rate * pose1 + (1 - rate) * Pose2Pose3 = fusion6DPose(pose1, pose2, alpha) # 这里只用一个关节点进行测试# 融合后print("PoseC: ", Pose3) # [[0.604, -0.901, 95.6615, 124.11717241, -83.2593501, -135.84186147]]print("All done!")2--Maya验证
)
)







![[SaaS] 家作->装修设计师](http://pic.xiahunao.cn/[SaaS] 家作->装修设计师)
)








