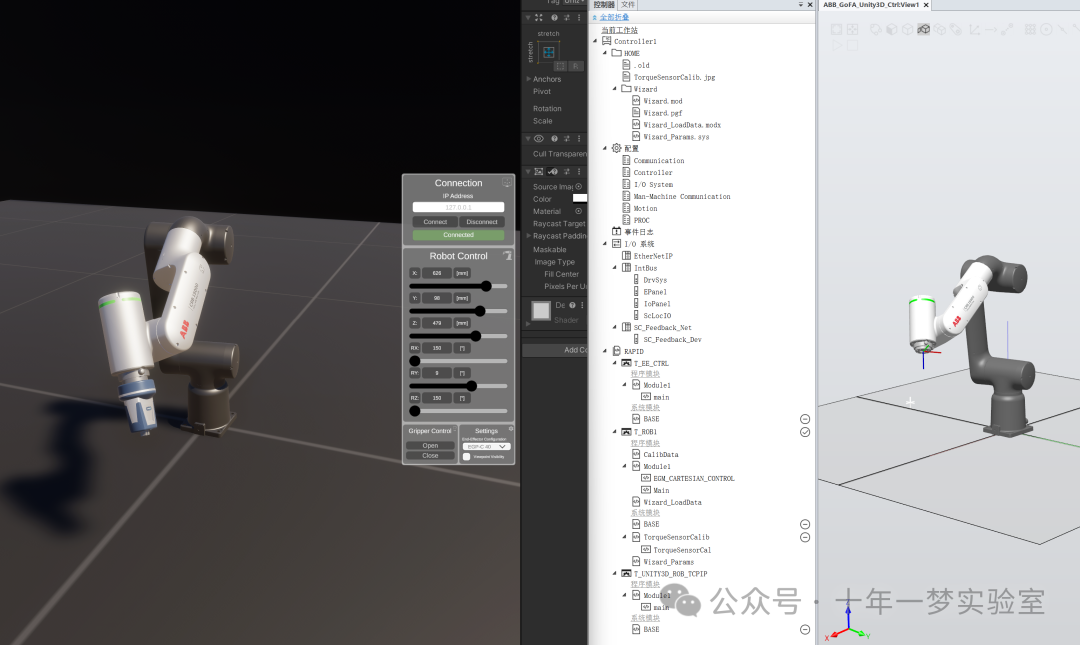
一、RobotStudio控制器的文件系统和配置参数
HOME:控制器文件系统的根目录或起始点。
配置:机器人控制器的配置设置和参数。
外件信息:连接到机器人的外部组件的信息。
I/O 系统:输入/输出系统,管理机器人和外部设备之间的信号和数据交换。
EPanel & IoPanel:与输入/输出配置和显示相关的特定面板。
EtherNetIP:一种特定的工业以太网通信协议。
IntBus:机器人架构内部的通信总线系统。
ScLocIO:本地输入/输出配置和设置。
SC_Feedback_Net & SC_Feedback_Dev:反馈网络和设备配置,可能与机器人设置中的传感器反馈系统有关。
RAPID (RobotWare Architecture Platform Independent Design):ABB的机器人编程语言。
各种模块(如TE_EE_CTRL,Module1,BASE等)包含与机器人控制的不同方面(如末端执行器控制,基座控制等)相关的特定RAPID代码文件或函数。
每个模块包含子目录,其中包含特定的RAPID程序或配置文件。
二、什么是外部引导运动(EGM)?
外部引导运动(EGM)是一种机器人控制模式,它允许机器人通过外部传感器或设备接收实时的位置或力的修正。EGM可以实现机器人的柔性运动,适应不确定的环境或任务。EGM可以分为笛卡尔控制和关节控制,分别对应于机器人的笛卡尔坐标系和关节坐标系。EGM需要使用特定的通信协议和编程语言(如RAPID)来设置和运行。EGM是ABB机器人的一种创新功能,可以提高机器人的灵活性和智能性。
三、如何在ABB机器人中使用EGM?
要在ABB机器人中使用EGM,您需要以下几个步骤:
选择合适的EGM模式(笛卡尔控制或关节控制)和参数(如修正框架,传感器框架,收敛条件,滤波器,采样率等)。
在RobotStudio中创建一个EGM控制器,并配置相应的通信设置(如端口号,协议类型,IP地址等)。
在RAPID程序中,使用EGM相关的函数(如EGMGetId,EGMSetupUC,EGMActPose,EGMRunPose等)来注册,设置,激活,运行和重置EGM会话。
在外部设备或传感器上,使用EGM相关的库(如EGM Python Library,EGM C# Library等)来建立与机器人的通信连接,并发送位置或力的修正数据。
在机器人上,观察EGM的运行状态和结果,根据需要调整EGM的参数或停止EGM会话。
您可以参考ABB的官方文档和示例来了解更多关于EGM的细节和用法。
四、如何在ROBOTSTUDIO中创建一个EGM控制器?
要在RobotStudio中创建一个EGM控制器,您可以按照以下步骤操作:
打开RobotStudio软件,选择“新建”或“打开”一个机器人项目。
在“控制器”选项卡下,右键单击“控制器”并选择“添加控制器”。
在弹出的对话框中,选择您想要的控制器类型(如IRC5,IRB 120等)和版本(如6.10,7.0等)。
在“控制器名称”栏中,输入您想要的控制器名称(如EGM_Controller)。
点击“确定”按钮,创建控制器。
在“控制器”选项卡下,右键单击您刚创建的控制器,并选择“配置”。
在弹出的对话框中,选择“通信”选项卡,然后点击“添加”按钮。
在弹出的对话框中,选择“UDPUC”作为通信类型,并输入您想要的端口号(如6510)和协议类型(如EGM)。
点击“确定”按钮,添加通信设置。
在“控制器”选项卡下,右键单击您刚创建的控制器,并选择“加载系统”。
在弹出的对话框中,选择您想要的系统文件(如EGM_RAPID.sys)并点击“打开”按钮。
等待系统文件加载完成,您就成功创建了一个EGM控制器。
您可以参考RobotStudio的官方文档和教程来了解更多关于EGM控制器的细节和用法。
五、您能否提供一些ABB机器人的EGM示例?
我可以为您提供一些ABB机器人的EGM示例,但请注意,这些示例仅供参考,您需要根据您的实际情况和需求进行修改和调整。以下是一些EGM示例的链接:
EGM Python Library:这是一个使用Python编写的EGM库,可以让您在外部设备或传感器上与ABB机器人进行EGM通信。它包含了一些EGM的示例代码和文档,如EGM关节控制,EGM笛卡尔控制,EGM力控制等。
EGM C# Library:这是一个使用C#编写的EGM库,可以让您在外部设备或传感器上与ABB机器人进行EGM通信。它包含了一些EGM的示例代码和文档,如EGM关节控制,EGM笛卡尔控制,EGM力控制等。
EGM RAPID Code Examples:这是一些使用RAPID编写的EGM代码示例,可以让您在ABB机器人上设置和运行EGM会话。它包含了一些EGM的示例代码和文档,如EGM关节控制,EGM笛卡尔控制,EGM力控制等。
您可以下载这些示例代码,并在RobotStudio中进行模拟或在实际机器人上进行测试。
六、详细解释 EGM的指令如何使用
EGM的指令是一些用于设置和运行EGM会话的RAPID函数,它们可以让您在ABB机器人上实现外部引导运动(EGM)的控制模式。以下是一些常用的EGM指令的详细解释:
EGMGetId egm_id;:这个指令用于注册一个EGM id,它是一个egmident类型的变量,用于标识EGM会话。您需要在使用其他EGM指令之前先调用这个指令。EGMSetupUC rob, egm_id, egm_port, egm_name, egm_mode;:这个指令用于设置EGM通信的参数,包括以下几个选项:rob:机器人的名称,如ROB_1。egm_id:EGM id,由EGMGetId指令返回。egm_port:EGM通信的端口号,如"6510"。egm_name:EGM通信的名称,如"ROB_1"。egm_mode:EGM通信的模式,可以是\Pose(笛卡尔控制),\Joint(关节控制),\Hybrid(混合控制),或\Force(力控制)。
EGMActPose egm_id, \Tool:=tool, \WObj:=wobj, corr_frame, corr_frame_type, sens_frame, sens_frame_type, \X:=x, \Y:=y, \Z:=z, \Rx:=rx, \Ry:=ry, \Rz:=rz, \LpFilter:=lp, \SampleRate:=sr, \MaxPosDeviation:=mpd, \MaxSpeedDeviation:=msd;:这个指令用于激活EGM笛卡尔控制的会话,它有以下几个选项:egm_id:EGM id,由EGMGetId指令返回。\Tool:=tool:工具坐标系,如tool0。\WObj:=wobj:工作对象坐标系,如wobj0。corr_frame:修正框架,是一个pose类型的变量,用于定义EGM传感器和机器人之间的位置和方向的偏移量。corr_frame_type:修正框架的类型,可以是EGM_FRAME_BASE(基座框架),EGM_FRAME_WOBJ(工作对象框架),EGM_FRAME_TOOL(工具框架),或EGM_FRAME_ROB(机器人框架)。sens_frame:传感器框架,是一个pose类型的变量,用于定义EGM传感器的位置和方向。sens_frame_type:传感器框架的类型,可以是EGM_FRAME_BASE(基座框架),EGM_FRAME_WOBJ(工作对象框架),EGM_FRAME_TOOL(工具框架),或EGM_FRAME_ROB(机器人框架)。\X:=x:X轴的收敛条件,是一个egm_minmax类型的变量,用于定义EGM传感器和机器人之间的X轴位置差的最小和最大值,单位是毫米。\Y:=y:Y轴的收敛条件,是一个egm_minmax类型的变量,用于定义EGM传感器和机器人之间的Y轴位置差的最小和最大值,单位是毫米。\Z:=z:Z轴的收敛条件,是一个egm_minmax类型的变量,用于定义EGM传感器和机器人之间的Z轴位置差的最小和最大值,单位是毫米。\Rx:=rx:Rx轴的收敛条件,是一个egm_minmax类型的变量,用于定义EGM传感器和机器人之间的Rx轴方向差的最小和最大值,单位是度。\Ry:=ry:Ry轴的收敛条件,是一个egm_minmax类型的变量,用于定义EGM传感器和机器人之间的Ry轴方向差的最小和最大值,单位是度。\Rz:=rz:Rz轴的收敛条件,是一个egm_minmax类型的变量,用于定义EGM传感器和机器人之间的Rz轴方向差的最小和最大值,单位是度。\LpFilter:=lp:低通滤波器的参数,是一个整数,用于平滑EGM传感器的数据,范围是0-1000,值越大,滤波效果越强。\SampleRate:=sr:采样率的参数,是一个整数,用于设置EGM传感器的数据发送频率,范围是4-250,单位是Hz,值越大,数据更新速度越快。\MaxPosDeviation:=mpd:最大位置偏差的参数,是一个整数,用于设置EGM传感器和机器人之间的位置差的上限,单位是毫米,值越大,容忍的误差越大。\MaxSpeedDeviation:=msd:最大速度偏差的参数,是一个整数,用于设置EGM传感器和机器人之间的速度差的上限,单位是毫米/秒,值越大,容忍的误差越大。
EGMRunPose egm_id, egm_state, \X \Y \Z \Rx \Ry \Rz \CondTime:=ct \RampInTime:=rit \RampOutTime:=rot \PosCorrGain:=pcg;:这个指令用于运行EGM笛卡尔控制的会话,它有以下几个选项:egm_id:EGM id,由EGMGetId指令返回。egm_state:EGM状态,可以是EGM_STOP_HOLD(停止并保持当前位置),EGM_STOP_REPLACE(停止并回到原始位置),EGM_STOP_ABORT(停止并中断EGM会话),或EGM_RUN(运行EGM会话)。\X \Y \Z \Rx \Ry \Rz:这些是用于指定EGM传感器和机器人之间的位置和方向差的变量,它们必须与EGMActPose指令中的相同,否则会出错。\CondTime:=ct:收敛时间的参数,是一个实数,用于设置EGM传感器和机器人之间的位置和方向差达到收敛条件的最长时间,单位是秒,值越大,等待的时间越长。\RampInTime:=rit:渐入时间的参数,是一个实数,用于设置EGM传感器和机器人之间的位置和方向差从0到最大值的变化时间,单位是秒,值越大,变化的速度越慢。\RampOutTime:=rot:渐出时间的参数,是一个实数,用于设置EGM传感器和机器人之间的位置和方向差从最大值到0的变化时间,单位是秒,值越大,变化的速度越慢。\PosCorrGain:=pcg:位置修正增益的参数,是一个实数,用于设置EGM传感器和机器人之间的位置差的修正比例,范围是0-1,值越大,修正的效果越强。
EGMReset egm_id;:这个指令用于重置EGM会话,它需要一个EGM id作为参数,由EGMGetId指令返回。您需要在结束EGM会话后调用这个指令,以释放EGM id和资源,恢复机器人的正常状态。EGMActJoint egm_id, \Tool:=tool, \WObj:=wobj, \J1:=j1, \J2:=j2, \J3:=j3, \J4:=j4, \J5:=j5, \J6:=j6, \LpFilter:=lp, \SampleRate:=sr, \MaxPosDeviation:=mpd, \MaxSpeedDeviation:=msd;:这个指令用于激活EGM关节控制的会话,它有以下几个选项:egm_id:EGM id,由EGMGetId指令返回。\Tool:=tool:工具坐标系,如tool0。\WObj:=wobj:工作对象坐标系,如wobj0。\J1:=j1:J1轴的收敛条件,是一个egm_minmax类型的变量,用于定义EGM传感器和机器人之间的J1轴位置差的最小和最大值,单位是度。\J2:=j2:J2轴的收敛条件,是一个egm_minmax类型的变量,用于定义EGM传感器和机器人之间的J2轴位置差的最小和最大值,单位是度。\J3:=j3:J3轴的收敛条件,是一个egm_minmax类型的变量,用于定义EGM传感器和机器人之间的J3轴位置差的最小和最大值,单位是度。\J4:=j4:J4轴的收敛条件,是一个egm_minmax类型的变量,用于定义EGM传感器和机器人之间的J4轴位置差的最小和最大值,单位是度。\J5:=j5:J5轴的收敛条件,是一个egm_minmax类型的变量,用于定义EGM传感器和机器人之间的J5轴位置差的最小和最大值,单位是度。\J6:=j6:J6轴的收敛条件,是一个egm_minmax类型的变量,用于定义EGM传感器和机器人之间的J6轴位置差的最小和最大值,单位是度。\LpFilter:=lp:低通滤波器的参数,是一个整数,用于平滑EGM传感器的数据,范围是0-1000,值越大,滤波效果越强。\SampleRate:=sr:采样率的参数,是一个整数,用于设置EGM传感器的数据发送频率,范围是4-250,单位是Hz,值越大,数据更新速度越快。\MaxPosDeviation:=mpd:最大位置偏差的参数,是一个整数,用于设置EGM传感器和机器人之间的位置差的上限,单位是度,值越大,容忍的误差越大。\MaxSpeedDeviation:=msd:最大速度偏差的参数,是一个整数,用于设置EGM传感器和机器人之间的速度差的上限,单位是度/秒,值越大,容忍的误差越大。
EGMRunJoint egm_id, egm_state, \J1 \J2 \J3 \J4 \J5 \J6 \CondTime:=ct \RampInTime:=rit \RampOutTime:=rot \PosCorrGain:=pcg;:这个指令用于运行EGM关节控制的会话,它有以下几个选项:egm_id:EGM id,由EGMGetId指令返回。egm_state:EGM状态,可以是EGM_STOP_HOLD(停止并保持当前位置),EGM_STOP_REPLACE(停止并回到原始位置),EGM_STOP_ABORT(停止并中断EGM会话),或EGM_RUN(运行EGM会话)。\J1 \J2 \J3 \J4 \J5 \J6:这些是用于指定EGM传感器和机器人之间的位置差的变量,它们必须与EGMActJoint指令中的相同,否则会出错。\CondTime:=ct:收敛时间的参数,是一个实数,用于设置EGM传感器和机器人之间的位置差达到收敛条件的最长时间,单位是秒,值越大,等待的时间越长。\RampInTime:=rit:渐入时间的参数,是一个实数,用于设置EGM传感器和机器人之间的位置差从0到最大值的变化时间,单位是秒,值越大,变化的速度越慢。\RampOutTime:=rot:渐出时间的参数,是一个实数,用于设置EGM传感器和机器人之间的位置差从最大值到0的变化时间,单位是秒,值越大,变化的速度越慢。\PosCorrGain:=pcg:位置修正增益的参数,是一个实数,用于设置EGM传感器和机器人之间的位置差的修正比例,范围是0-1,值越大,修正的效果越强。
这就是我对EGM指令的详细解释,希望对您有所帮助
)




看一下这些与指针有关的题你都会做吗?)
)







![[MRCTF2020]Transform1](http://pic.xiahunao.cn/[MRCTF2020]Transform1)


)

