个人名片:
🦁作者简介:学生
🐯个人主页:妄北y🐧个人QQ:2061314755
🐻个人邮箱:2061314755@qq.com
🦉个人WeChat:Vir2021GKBS
🐼本文由妄北y原创,首发CSDN🎊🎊🎊
🐨座右铭:大多数人想要改造这个世界,但却罕有人想改造自己。

专栏导航:
妄北y系列专栏导航:
C/C++的基础算法:C/C++是一种常用的编程语言,可以用于实现各种算法,这里我们对一些基础算法进行了详细的介绍与分享。🎇🎇🎇
QT基础入门学习:对QT的基础图形化页面设计进行了一个简单的学习与认识,利用QT的基础知识进行了翻金币小游戏的制作🤹🤹🤹
Linux基础编程:初步认识什么是Linux,为什么学Linux,安装环境,进行基础命令的学习,入门级的shell编程。🍻🍻🍻
Linux应用开发基础开发:分享Linux的基本概念、命令行操作、文件系统、用户和权限管理等,网络编程相关知识,TCP/IP 协议、套接字(Socket)编程等,可以实现网络通信功能。💐💐💐
Linux项目开发:Linux基础知识的实践,做项目是最锻炼能力的一个学习方法,这里我们会学习到一些简单基础的项目开发与应用,而且都是毕业设计级别的哦。🤸🤸🤸
非常期待和您一起在这个小小的互联网世界里共同探索、学习和成长。💝💝💝 ✨✨ 欢迎订阅本专栏 ✨✨

文章介绍:
🎉本篇文章对Linux驱动基础学习的相关知识进行分享!🥳🥳🥳
设备树(Device Tree)是Linux内核用来描述硬件结构的数据结构。它使得内核可以在没有硬编码驱动的情况下识别并配置硬件。在嵌入式系统中,设备树特别有用,因为它们经常具有非常不同的硬件配置,而设备树提供了一种灵活的方式来描述这些配置。
如果您觉得文章不错,期待你的一键三连哦,你的鼓励是我创作动力的源泉,让我们一起加油,一起奔跑,让我们顶峰相见!!!💪💪💪
🎁感谢大家点赞👍收藏⭐评论✍️
一、总结 3 种写驱动程序的方法
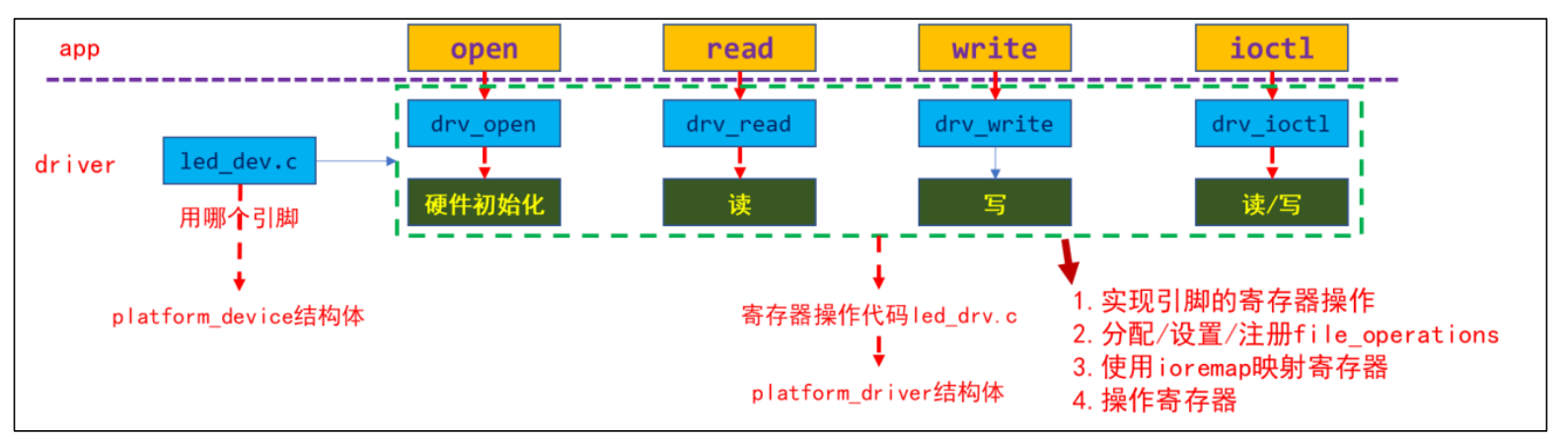
1.1 资源和驱动在同一个文件里

1.2 资源用 platform_device 指定、驱动在 platform_driver 实现
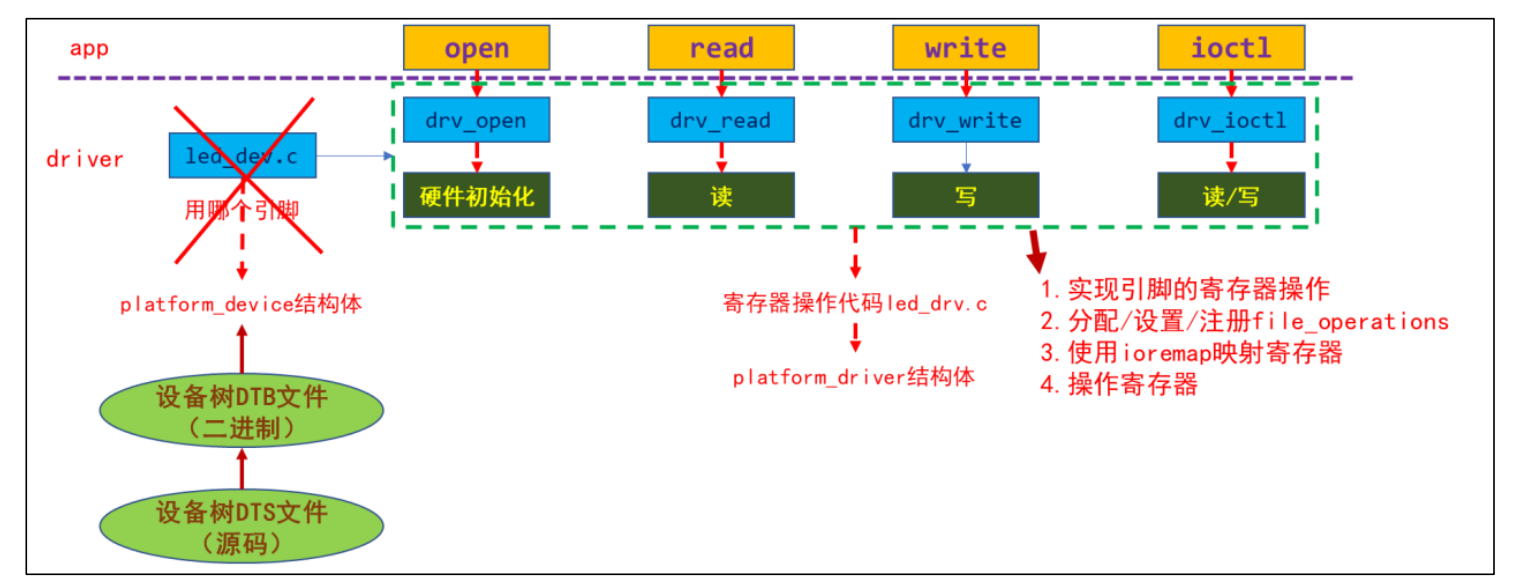
1.3 资源用设备树指定驱动在 platform_driver 实现
核心永远是 file_operations 结构体。
上述三种方法,只是指定“硬件资源”的方式不一样。
platform_device/platform_driver 只是编程的技巧,不涉及驱动的核心
二、怎么使用设备树写驱动程序
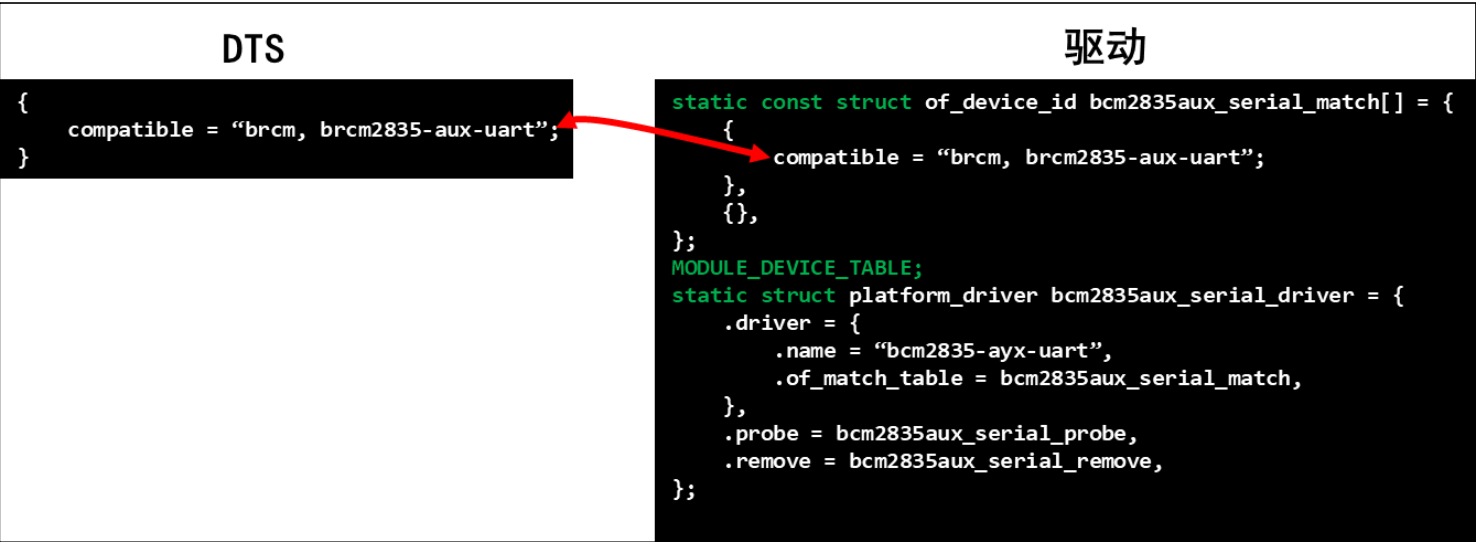
2.1 设备树节点要与 platform_driver 能匹配
在我们的工作中,驱动要求设备树节点提供什么,我们就得按这要求去编写设备树。 但是,匹配过程所要求的东西是固定的:
(1)设备树要有 compatible 属性,它的值是一个字符串
(2)platform_driver 中要有 of_match_table,其中一项的.compatible 成员设置为一个字符串
(3)上述 2 个字符串要一致。
示例如下:
2.2 设备树节点指定资源,platform_driver 获得资源
如果在设备树节点里使用reg属性,那么内核生成对应的platform_device 时会用 reg 属性来设置 IORESOURCE_MEM 类型的资源。
如果在设备树节点里使用 interrupts 属性,那么内核生成对应的 platform_device 时会用 reg 属性来设置 IORESOURCE_IRQ 类型的资源。对于 interrupts 属性,内核会检查它的有效性,所以不建议在设备树里使用该属性来表示其他资源。
在我们的工作中,驱动要求设备树节点提供什么,我们就得按这要求去编写设备树。驱动程序中根据 pin 属性来确定引脚,那么我们就在设备树节点中添加 pin 属性。
设备树节点中:
#define GROUP_PIN(g,p) ((g<<16) | (p))
100ask_led0 {compatible = “100ask,led”;pin = <GROUP_PIN(5, 3)>;
};
驱动程序中,可以从 platform_device 中得到 device_node,再用of_property_read_u32 得到属性的值:
struct device_node* np = pdev->dev. of_node;
int led_pin;
int err = of_property_read_u32(np, “pin”, &led_pin);三、开始编程
3.1 修改设备树添加 led 设备节点
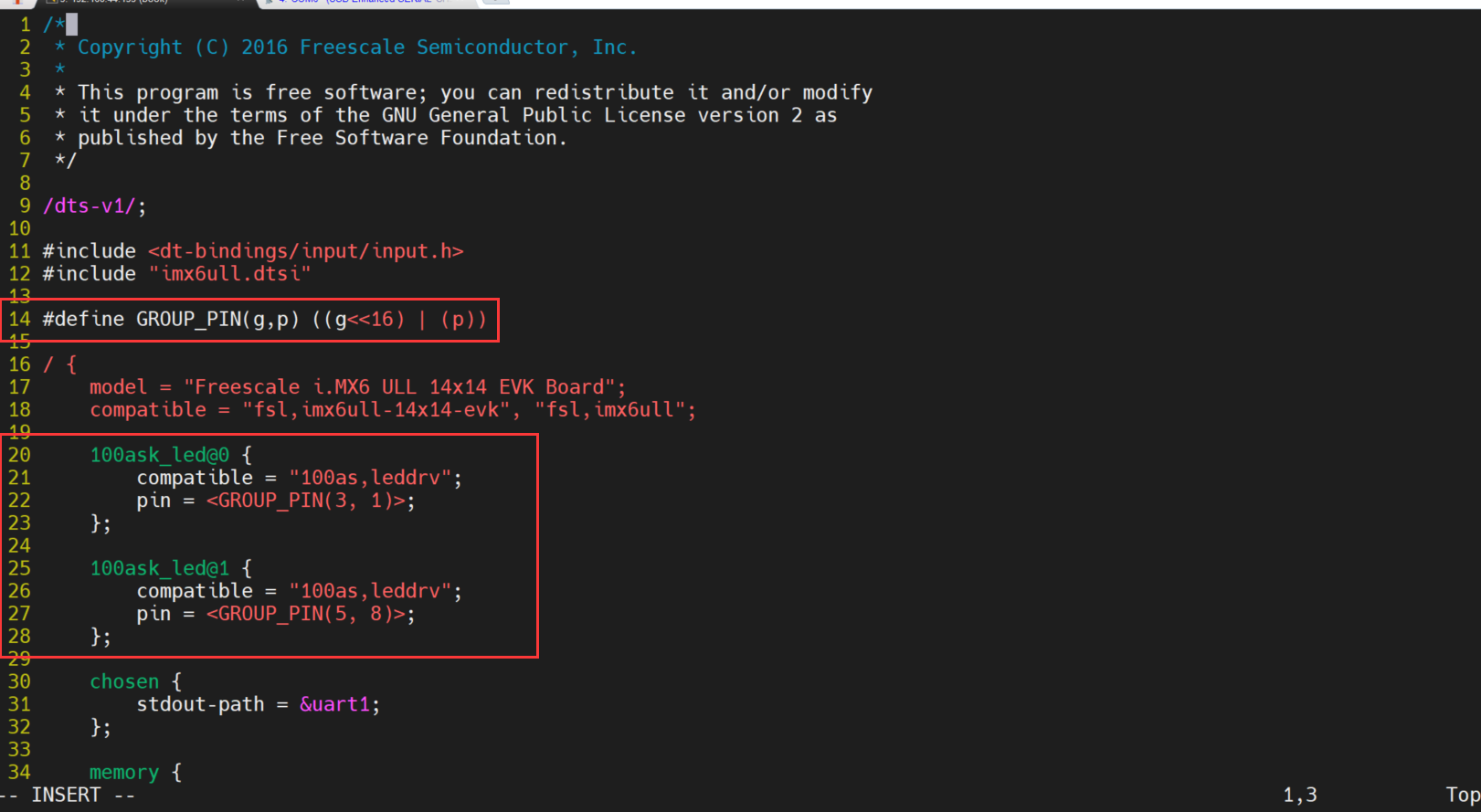
需要添加的设备节点代码是一样的,你需要找到你的单板所用的设备树文件,在它的根节点下添加如下内容:
#define GROUP_PIN(g,p) ((g<<16) | (p))/ {100ask_led@0 { //在设备树中,节点通常代表一个设备或子系统。compatible = "100as,leddrv"; //这表示该节点所代表的设备与名为 "100as,leddrv" 的驱动程序兼容pin = <GROUP_PIN(3, 1)>; //这设置了一个名为 pin 的属性,并使用前面定义的 GROUP_PIN 宏将其初始化};100ask_led@1 {compatible = "100as,leddrv"; pin = <GROUP_PIN(5, 8)>;};};对百问网 imx6ull Pro 板
设备树文件是:内核源码目录中 arch/arm/boot/dts/100ask_imx6ull-14x14.dts 修改、编译后得到 arch/arm/boot/dts/100ask_imx6ull-14x14.dtb 文件。
对于这款板子,本教程中我们使用 SD 卡上的系统。
要更换板上的设备树文件,你可以使用 SD 卡启动开发板后,更换这个文件:/boot/100ask_imx6ull-14x14.dtb
chip_demo_gpio.c(驱动程序)
#include <linux/module.h>#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#include <linux/platform_device.h>
#include <linux/of.h>#include "led_opr.h"
#include "leddrv.h"
#include "led_resource.h"static int g_ledpins[100];
static int g_ledcnt = 0;static int board_demo_led_init (int which) /* 初始化LED, which-哪个LED */
{ //printk("%s %s line %d, led %d\n", __FILE__, __FUNCTION__, __LINE__, which);printk("init gpio: group %d, pin %d\n", GROUP(g_ledpins[which]), PIN(g_ledpins[which]));switch(GROUP(g_ledpins[which])){case 0:{printk("init pin of group 0 ...\n");break;}case 1:{printk("init pin of group 1 ...\n");break;}case 2:{printk("init pin of group 2 ...\n");break;}case 3:{printk("init pin of group 3 ...\n");break;}}return 0;
}static int board_demo_led_ctl (int which, char status) /* 控制LED, which-哪个LED, status:1-亮,0-灭 */
{//printk("%s %s line %d, led %d, %s\n", __FILE__, __FUNCTION__, __LINE__, which, status ? "on" : "off");printk("set led %s: group %d, pin %d\n", status ? "on" : "off", GROUP(g_ledpins[which]), PIN(g_ledpins[which]));switch(GROUP(g_ledpins[which])){case 0:{printk("set pin of group 0 ...\n");break;}case 1:{printk("set pin of group 1 ...\n");break;}case 2:{printk("set pin of group 2 ...\n");break;}case 3:{printk("set pin of group 3 ...\n");break;}}return 0;
}static struct led_operations board_demo_led_opr = {.init = board_demo_led_init,.ctl = board_demo_led_ctl,
};struct led_operations *get_board_led_opr(void)
{return &board_demo_led_opr;
}static int chip_demo_gpio_probe(struct platform_device *pdev)
{struct device_node *np;int err = 0;int led_pin;np = pdev->dev.of_node;if (!np)return -1;err = of_property_read_u32(np, "pin", &led_pin);g_ledpins[g_ledcnt] = led_pin;led_class_create_device(g_ledcnt);g_ledcnt++;return 0;}static int chip_demo_gpio_remove(struct platform_device *pdev)
{int i = 0;int err;struct device_node *np;int led_pin;np = pdev->dev.of_node;if (!np)return -1;err = of_property_read_u32(np, "pin", &led_pin);for (i = 0; i < g_ledcnt; i++){if (g_ledpins[i] == led_pin){led_class_destroy_device(i);g_ledpins[i] = -1;break;};}for (i = 0; i < g_ledcnt; i++){if (g_ledpins[i] != -1)break;}if (i == g_ledcnt)g_ledcnt = 0;return 0;
}static const struct of_device_id ask100_leds[] = {{ .compatible = "100as,leddrv" },{ },
};static struct platform_driver chip_demo_gpio_driver = {.probe = chip_demo_gpio_probe,.remove = chip_demo_gpio_remove,.driver = {.name = "100ask_led",.of_match_table = ask100_leds,},
};static int __init chip_demo_gpio_drv_init(void)
{int err;err = platform_driver_register(&chip_demo_gpio_driver); register_led_operations(&board_demo_led_opr);return 0;
}static void __exit lchip_demo_gpio_drv_exit(void)
{platform_driver_unregister(&chip_demo_gpio_driver);
}module_init(chip_demo_gpio_drv_init);
module_exit(lchip_demo_gpio_drv_exit);MODULE_LICENSE("GPL");第161~168行: chip_demo_gpio_driver(驱动程序)
static struct platform_driver chip_demo_gpio_driver = {.probe = chip_demo_gpio_probe,.remove = chip_demo_gpio_remove,.driver = {.name = "100ask_led",.of_match_table = ask100_leds, //用于支持设备树}, };第156~159行:指向ask100_leds[]数组
static const struct of_device_id ask100_leds[] = {{ .compatible = "100as,leddrv" }, //这里需要与设备树文件的字符串相互对应{ }, };
第101~119行:chip_demo_gpio_probe
当我们装载上面的驱动程序时,对于俩个100ask_led的节点都需要调用 chip_demo_gpio_probe 函数,需要调用俩次,对于每个匹配的 platform_device 都会去调用一次
static int chip_demo_gpio_probe(struct platform_device *pdev) {struct device_node *np;int err = 0;int led_pin;np = pdev->dev.of_node;if (!np)return -1;err = of_property_read_u32(np, "pin", &led_pin);g_ledpins[g_ledcnt] = led_pin;led_class_create_device(g_ledcnt);g_ledcnt++;return 0;}从 platform_device里面找到对应的设备节点找到pin属性
np = pdev->dev.of_node;if (!np)return -1;这个platform_driver支持的platform_device,可能来自设备树,也可能不是来自设备树,所以这里要判断一下
用 of_property_read_u32 得到属性的值:err = of_property_read_u32(np, "pin", &led_pin);从np节点中读取pin属性,把它的值保存在led_pin的变量里面
将led_pin幅值给g_ledpins[g_ledcnt]
g_ledpins[g_ledcnt] = led_pin;
韦东山老师对整个驱动程序框架的梳理
整个驱动程序框架的梳理
3.2 修改上层对应代码
leddrv.c(上层程序)
#include <linux/module.h>#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>#include "led_opr.h"/* 1. 确定主设备号 */
static int major = 0;
static struct class *led_class;
struct led_operations *p_led_opr;#define MIN(a, b) (a < b ? a : b)void led_class_create_device(int minor)
{device_create(led_class, NULL, MKDEV(major, minor), NULL, "100ask_led%d", minor); /* /dev/100ask_led0,1,... */
}
void led_class_destroy_device(int minor)
{device_destroy(led_class, MKDEV(major, minor));
}
void register_led_operations(struct led_operations *opr)
{p_led_opr = opr;
}EXPORT_SYMBOL(led_class_create_device);
EXPORT_SYMBOL(led_class_destroy_device);
EXPORT_SYMBOL(register_led_operations);/* 3. 实现对应的open/read/write等函数,填入file_operations结构体 */
static ssize_t led_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);return 0;
}/* write(fd, &val, 1); */
static ssize_t led_drv_write (struct file *file, const char __user *buf, size_t size, loff_t *offset)
{int err;char status;struct inode *inode = file_inode(file);int minor = iminor(inode);printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);err = copy_from_user(&status, buf, 1);/* 根据次设备号和status控制LED */p_led_opr->ctl(minor, status);return 1;
}static int led_drv_open (struct inode *node, struct file *file)
{int minor = iminor(node);printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);/* 根据次设备号初始化LED */p_led_opr->init(minor);return 0;
}static int led_drv_close (struct inode *node, struct file *file)
{printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);return 0;
}/* 2. 定义自己的file_operations结构体 */
static struct file_operations led_drv = {.owner = THIS_MODULE,.open = led_drv_open,.read = led_drv_read,.write = led_drv_write,.release = led_drv_close,
};/* 4. 把file_operations结构体告诉内核:注册驱动程序 */
/* 5. 谁来注册驱动程序啊?得有一个入口函数:安装驱动程序时,就会去调用这个入口函数 */
static int __init led_init(void)
{int err;printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);major = register_chrdev(0, "100ask_led", &led_drv); /* /dev/led */led_class = class_create(THIS_MODULE, "100ask_led_class");err = PTR_ERR(led_class);if (IS_ERR(led_class)) {printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);unregister_chrdev(major, "led");return -1;}return 0;
}/* 6. 有入口函数就应该有出口函数:卸载驱动程序时,就会去调用这个出口函数 */
static void __exit led_exit(void)
{printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);class_destroy(led_class);unregister_chrdev(major, "100ask_led");
}/* 7. 其他完善:提供设备信息,自动创建设备节点 */module_init(led_init);
module_exit(led_exit);MODULE_LICENSE("GPL");第73~82行:入口函数 led_drv_open
static int led_drv_open (struct inode *node, struct file *file) {int minor = iminor(node);printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);/* 根据次设备号初始化LED */p_led_opr->init(minor);return 0; }用p_led_opr结构体初始化引脚
/* 根据次设备号初始化LED */p_led_opr->init(minor);p_led_opr结构体由底层代码调用register_led_operations函数提供上来的
void register_led_operations(struct led_operations *opr) {p_led_opr = opr; }
第170~178行:这里是底层chip_demo_gpio.c的部分代码
static int __init chip_demo_gpio_drv_init(void) {int err;err = platform_driver_register(&chip_demo_gpio_driver); register_led_operations(&board_demo_led_opr);return 0; }第91~94行:由代码中的入口函数提供结构体 board_demo_led_opr 并且注册了一个chip_demo_gpio_driver
static struct led_operations board_demo_led_opr = {.init = board_demo_led_init,.ctl = board_demo_led_ctl, };这个结构体有操作硬件的具体函数
static struct platform_driver chip_demo_gpio_driver = {.probe = chip_demo_gpio_probe,.remove = chip_demo_gpio_remove,.driver = {.name = "100ask_led",.of_match_table = ask100_leds,}, };第161~168行:发现有和他匹配的 platform_device 时候会配用 chip_demo_gpio_probe
第101~119行:
static int chip_demo_gpio_probe(struct platform_device *pdev) {struct device_node *np;int err = 0;int led_pin;np = pdev->dev.of_node;if (!np)return -1;err = of_property_read_u32(np, "pin", &led_pin); //确定引脚是哪一个g_ledpins[g_ledcnt] = led_pin;led_class_create_device(g_ledcnt); //向上一层注册这些引脚g_ledcnt++;return 0;}第30~33行:根据引脚创建设备节点,这里的设备节点与设备树中的设备节点不是一回事,是文件系统里面的设备节点,应用程序就可以使用这个文件系统中的设备节点来访问我们的硬件
void led_class_create_device(int minor) {device_create(led_class, NULL, MKDEV(major, minor), NULL, "100ask_led%d", minor); /* /dev/100ask_led0,1,... */ }
第121~ 154行:去除某个platform_device时候需要调用led_class_destroy_device(i);将文件设备节点销毁
static int chip_demo_gpio_remove(struct platform_device *pdev) {int i = 0;int err;struct device_node *np;int led_pin;np = pdev->dev.of_node;if (!np)return -1;err = of_property_read_u32(np, "pin", &led_pin);for (i = 0; i < g_ledcnt; i++){if (g_ledpins[i] == led_pin){led_class_destroy_device(i);g_ledpins[i] = -1;break;};}for (i = 0; i < g_ledcnt; i++){if (g_ledpins[i] != -1)break;}if (i == g_ledcnt)g_ledcnt = 0;return 0; }根据pin属性消除设备
for (i = 0; i < g_ledcnt; i++){if (g_ledpins[i] == led_pin){led_class_destroy_device(i);g_ledpins[i] = -1;break;};}
3.3 Makefile
# 1. 使用不同的开发板内核时, 一定要修改KERN_DIR
# 2. KERN_DIR中的内核要事先配置、编译, 为了能编译内核, 要先设置下列环境变量:
# 2.1 ARCH, 比如: export ARCH=arm64
# 2.2 CROSS_COMPILE, 比如: export CROSS_COMPILE=aarch64-linux-gnu-
# 2.3 PATH, 比如: export PATH=$PATH:/home/book/100ask_roc-rk3399-pc/ToolChain-6.3.1/gcc-linaro-6.3.1-2017.05-x86_64_aarch64-linux-gnu/bin
# 注意: 不同的开发板不同的编译器上述3个环境变量不一定相同,
# 请参考各开发板的高级用户使用手册KERN_DIR = /home/book/100ask_imx6ull-sdk/Linux-4.9.88all:make -C $(KERN_DIR) M=`pwd` modules $(CROSS_COMPILE)gcc -o ledtest ledtest.c clean:make -C $(KERN_DIR) M=`pwd` modules cleanrm -rf modules.orderrm -f ledtest# 参考内核源码drivers/char/ipmi/Makefile
# 要想把a.c, b.c编译成ab.ko, 可以这样指定:
# ab-y := a.o b.o
# obj-m += ab.oobj-m += leddrv.o chip_demo_gpio.o3.4 ledtest.c
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>/** ./ledtest /dev/100ask_led0 on* ./ledtest /dev/100ask_led0 off*/
int main(int argc, char **argv)
{int fd;char status;/* 1. 判断参数 */if (argc != 3) {printf("Usage: %s <dev> <on | off>\n", argv[0]);return -1;}/* 2. 打开文件 */fd = open(argv[1], O_RDWR);if (fd == -1){printf("can not open file %s\n", argv[1]);return -1;}/* 3. 写文件 */if (0 == strcmp(argv[2], "on")){status = 1;write(fd, &status, 1);}else{status = 0;write(fd, &status, 1);}close(fd);return 0;
}四、上机测试
4.1编译
编译程序,把代码上传代服务器后执行 make 命令。
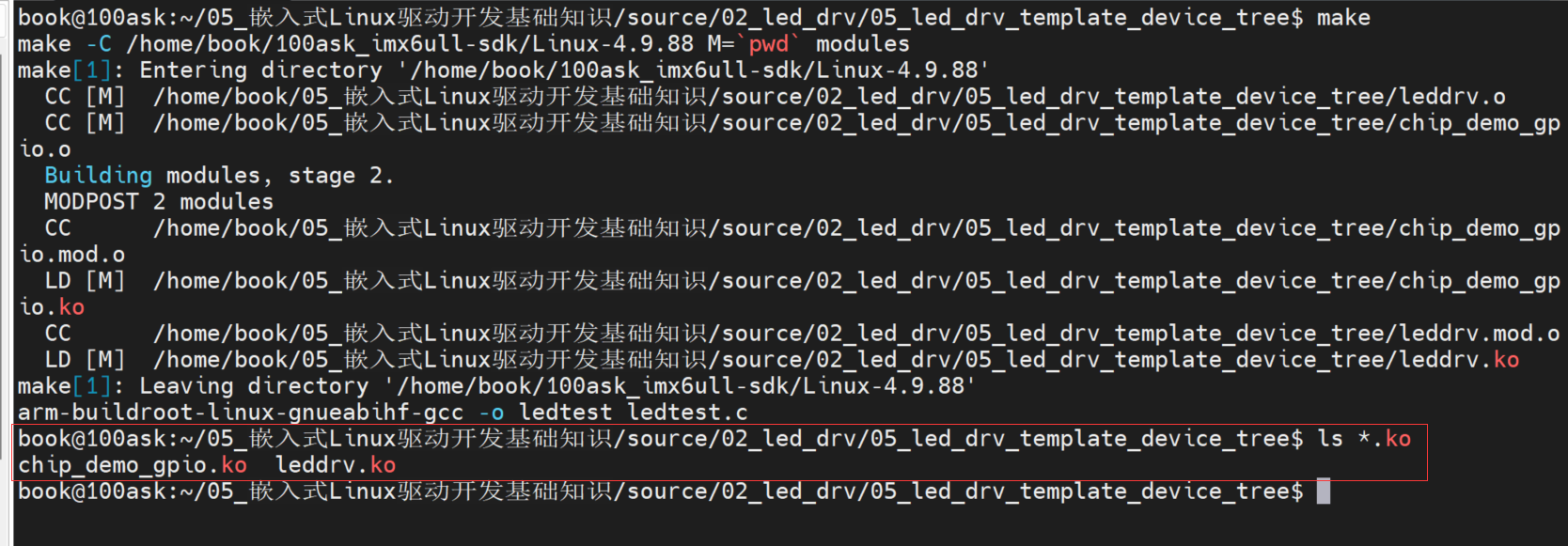
cp *.ko ledtest ~/nfs_rootfs/
4.2 挂载到开发板
在开发板上挂载 NFS


4.3 修改设备树
//进入内核修改设备树
book@100ask:~$ cd 100ask_imx6ull-sdk/
book@100ask:~/100ask_imx6ull-sdk$ cd Linux-4.9.88/
 内核源码目录中 arch/arm/boot/dts/100ask_imx6ull-14x14.dts 修改、编译后得到 arch/arm/boot/dts/100ask_imx6ull-14x14.dtb 文件。
内核源码目录中 arch/arm/boot/dts/100ask_imx6ull-14x14.dts 修改、编译后得到 arch/arm/boot/dts/100ask_imx6ull-14x14.dtb 文件。
book@100ask:~/100ask_imx6ull-sdk/Linux-4.9.88$ vi arch/arm/boot/dts/100ask_imx6ull-14x14.dts
加入我们之前写好了的设备节点
修改后重新编译后得到 arch/arm/boot/dts/100ask_imx6ull-14x14.dtb 文件拷贝到开发板上
book@100ask:~/100ask_imx6ull-sdk/Linux-4.9.88$ make dtbs
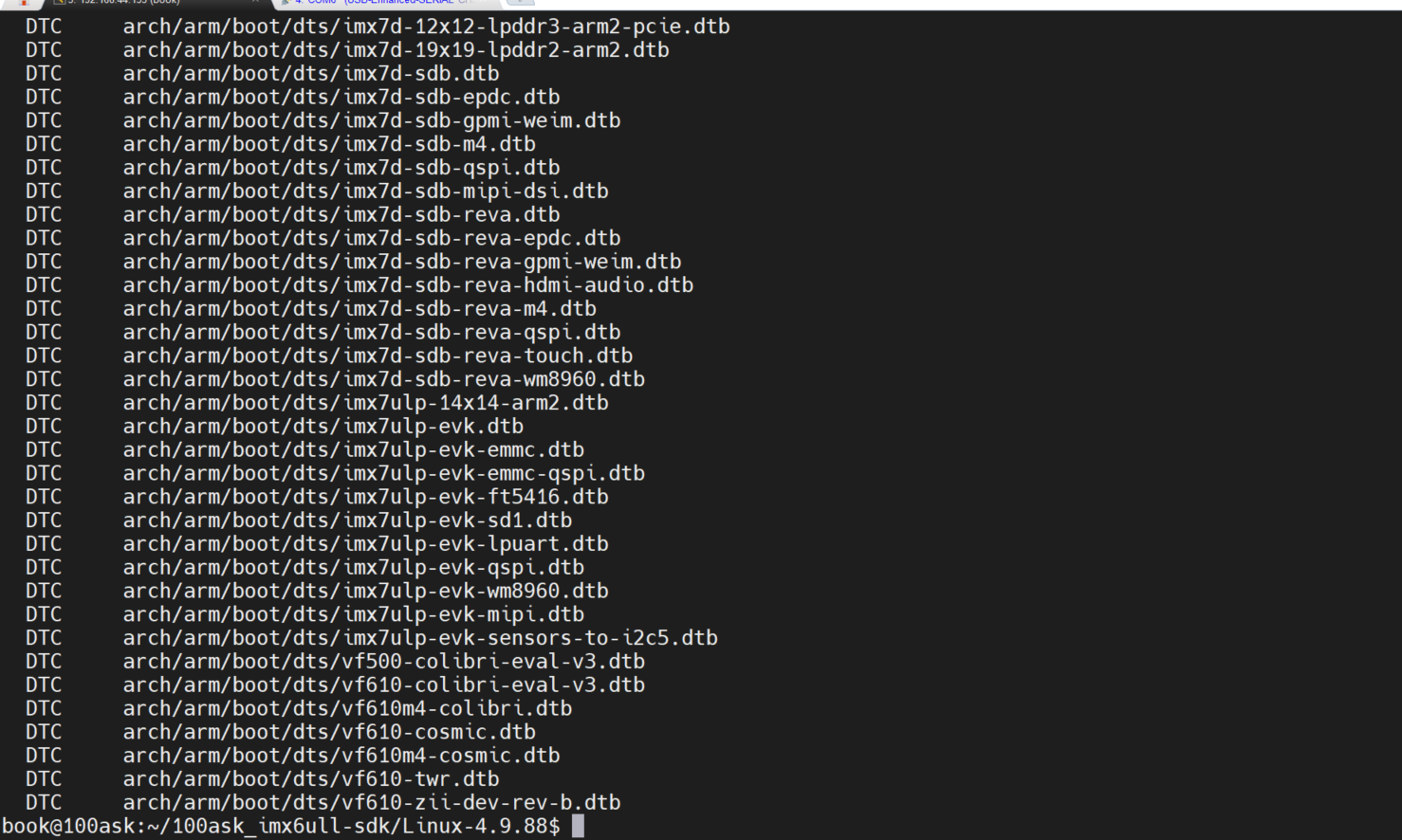
book@100ask:~/100ask_imx6ull-sdk/Linux-4.9.88$ cp arch/arm/boot/dts/100ask_imx6ull-14x14.dtb ~/nfs_rootfs/

将100ask_imx6ull-14x14.dtb 放到boot目录下后重启开发板
[root@100ask:/mnt]# cp /mnt/100ask_imx6ull-14x14.dtb /boot/
[root@100ask:/mnt]# reboot
4.4 调试技巧
4.4.1 设备树信息
/sys 目录下有很多内核、驱动的信息。以下目录对应设备树的根节点,可以从此进去找到自己定义的节点。cd /sys/firmware/devicetree/base/
[root@100ask:~]# cd /sys/firmware/devicetree/base/
[root@100ask:/sys/firmware/devicetree/base]# ls -ld 100ask*

节点是目录,属性是文件。 属性值是字符串时,用 cat 命令可以打印出来;属性值是数值时,用 hexdump 命令可以打印出来。
[root@100ask:/sys/firmware/devicetree/base]# cd 100ask_led\@0
[root@100ask:/sys/firmware/devicetree/base/100ask_led@0]# ls
[root@100ask:/sys/firmware/devicetree/base/100ask_led@0]# cat compatible
100as,leddrv[root@100ask:/sys/firmware/devicetree/base/100ask_led@0]# cat pin
[root@100ask:/sys/firmware/devicetree/base/100ask_led@0]# hexdump pin
0000000 0300 0100
0000004
4.4.2 platform_device 的信息
以下目录含有注册进内核的所有 platform_device:/sys/devices/platform
一个设备对应一个目录,进入某个目录后,如果它有“driver”子目录,就表示这个 platform_device 跟某个 platform_driver 配对了。
比如下面的结果中,平台设备“ff8a0000.i2s”已经跟平台驱动“rockchip-i2s”配对了:

4.4.3 platform_driver 的信息
以下目录含有注册进内核的所有 platform_driver:/sys/bus/platform/drivers
一个 driver 对应一个目录,进入某个目录后,如果它有配对的设备,可以 直接看到。
[root@100ask:/sys/firmware/devicetree/base/100ask_led@0]# cd /sys/bus/platform/drivers比如下面的结果中,平台驱动“rockchip-i2s”跟 2 个平台设备“平台设备“ff890000.i2s”、“ff8a0000.i2s”配对了:

注意:一个平台设备只能配对一个平台驱动,一个平台驱动可以配对多个平台设备。
4.5 重新装载驱动程序
[root@100ask:/sys/devices/platform]# insmod /mnt/leddrv.ko
[root@100ask:/sys/devices/platform]# insmod /mnt/chip_demo_gpio.ko
大佬觉得有用的话点个赞 👍🏻 呗。
❤️❤️❤️本人水平有限,如有纰漏,欢迎各位大佬评论批评指正!😄😄😄💘💘💘如果觉得这篇文对你有帮助的话,也请给个点赞、收藏下吧,非常感谢!👍 👍 👍
🔥🔥🔥任务在无形中完成,价值在无形中升华,让我们一起加油吧!🌙🌙🌙





















