paper:Deep Networks with Stochastic Depth
official implementation:https://github.com/yueatsprograms/Stochastic_Depth
third-party implementation:https://github.com/open-mmlab/mmcv/blob/main/mmcv/cnn/bricks/drop.py
存在的问题
网络深度是模型表达能力的决定性因素,但是非常深的网络也带来了新的挑战:反向传播中的梯度消失、前向传播中特征重用变少、更长的训练时间。
本文的创新点
本文提出了一种新的训练深度网络的方法,随机深度stochastic depth,在训练阶段随机删除某些层使得网络的总层数变少,既缓解了梯度消失和特征重用减少的问题,又缩短了训练时间。此外和Dropout类似,stochastic depth还起到了正则化的作用,即使在有BN的情况下。用随机深度训练的网络还可以看作不同深度网络的隐式集和ensemble。
方法介绍
Stochastic depth的目的是在训练过程中减小网络的深度,同时在测试过程中保持其不变。\(b_{\ell}\in\{0,1\}\) 是一个伯努利随机变量,表示第 \(\ell^{th}\) ResBlock是active(\(b_{\ell}=1\))还是inactive(\(b_{\ell}=0\)),更进一步,将ResBlock \(\ell\) 的“存活”概率表示为 \(p_{\ell}=Pr(b_{\ell}=1)\)。\(p_{\ell}\) 是唯一的超参,关于 \(p_{\ell}\) 的设置有两种方式,一种是对所有层 \(\ell\) 设置同一 \(p_{\ell}\)。另一种是采用线性递减的方式,对于输入 \(p_{0}=1\) 线性递减到最后一个ResBlock的 \(p_{L}\),如下
![]()
作者通过实验得出结论第二种设置方式效果更好。
代码解析
这里的代码来自MMCV,和论文中的实现有出入,其中shape只保留batch_size的值,其它所有维度的值都为1。torch.rand从均匀分布[0, 1]中采样,与keep_prob相加得到random_tensor后最后再向下取整.floor(),假设drop_prob=0.2即有0.2的概率丢弃该层,则有keep_prob=1-drop_prob=0.8的概率保留该层,与[0, 1]均匀分布相加后有0.8的概率大于1向下取整后为1,0.2的概率小于1向下取整后为0。x.div(keep_prob)和dropout中的操作一样,因为训练时随机丢弃部分连接或层,推理时不丢弃,除以keep_prob是为了保持总体期望不变。
def drop_path(x: torch.Tensor,drop_prob: float = 0.,training: bool = False) -> torch.Tensor:"""Drop paths (Stochastic Depth) per sample (when applied in main path ofresidual blocks).We follow the implementationhttps://github.com/rwightman/pytorch-image-models/blob/a2727c1bf78ba0d7b5727f5f95e37fb7f8866b1f/timm/models/layers/drop.py # noqa: E501"""if drop_prob == 0. or not training:return xkeep_prob = 1 - drop_prob# handle tensors with different dimensions, not just 4D tensors.shape = (x.shape[0], ) + (1, ) * (x.ndim - 1)random_tensor = keep_prob + torch.rand(shape, dtype=x.dtype, device=x.device)output = x.div(keep_prob) * random_tensor.floor()return output实验结果
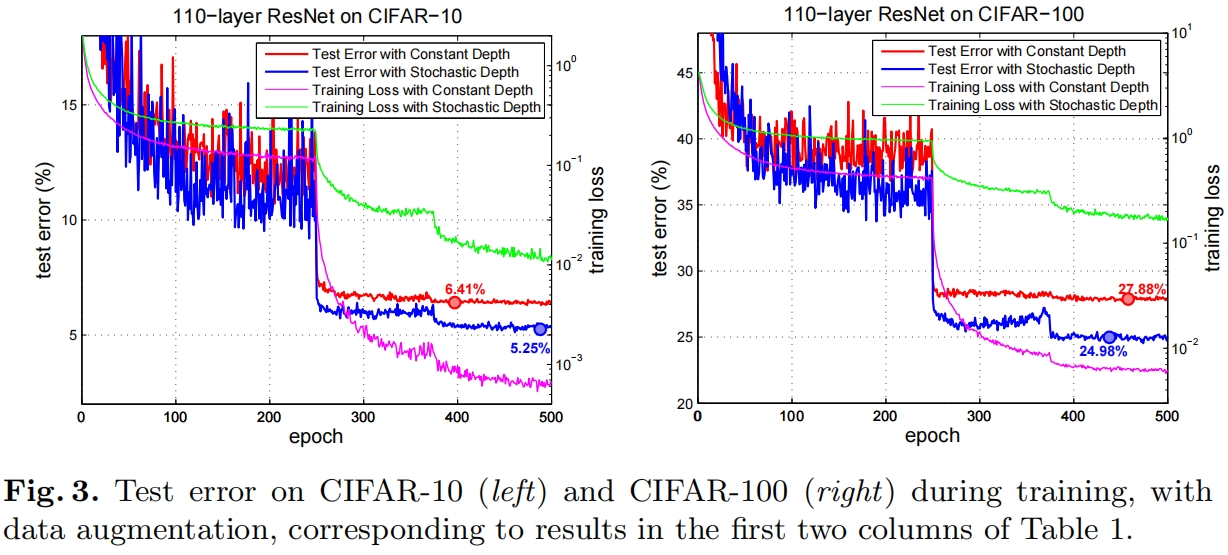
如图所示,在CIFAR-10和CIFAR-100上,使用stochastic depth在测试机上的误差都更小。


















优化)
