目录
1.课题概述
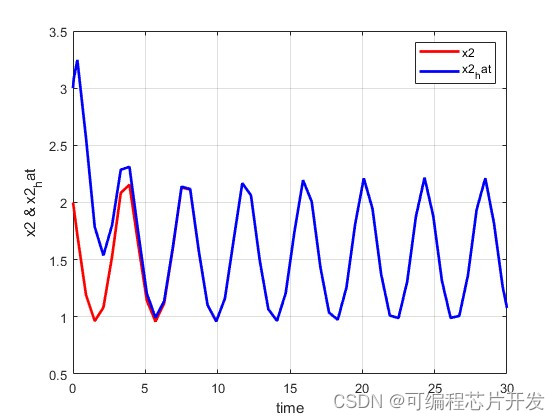
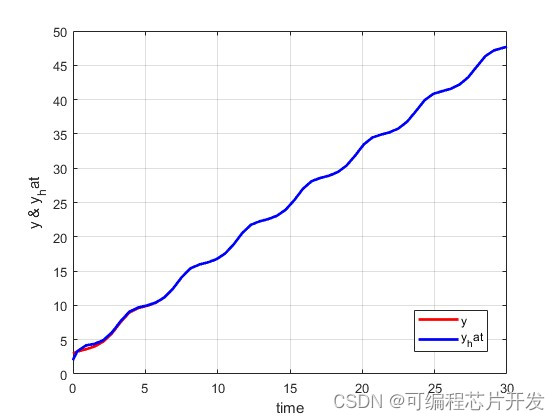
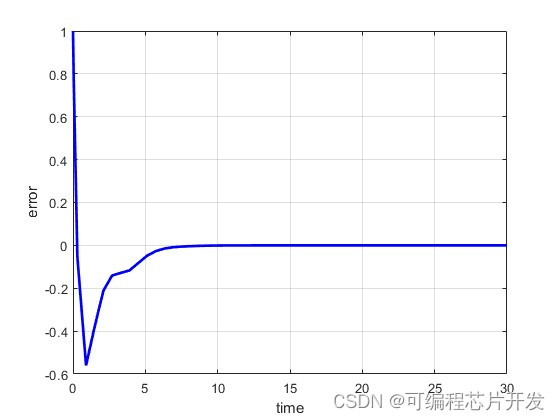
2.系统仿真结果
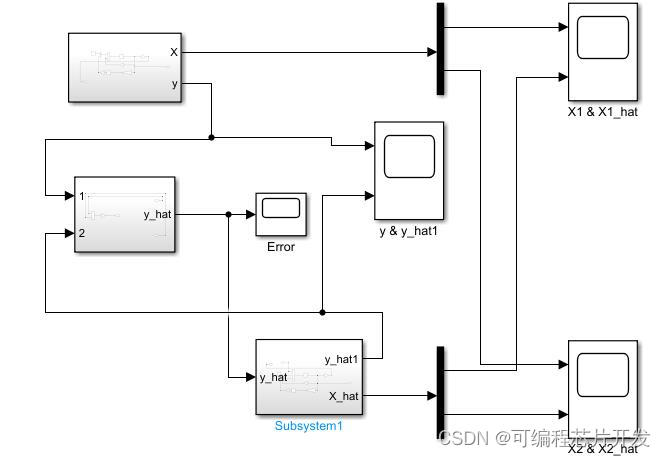
3.核心程序与模型
4.系统原理简介
4.1非线性系统及观测器概述
4.2 Lipschitz观测器原理
5.完整工程文件
1.课题概述
基于非线性系统的Lipschitz观测器simulink建模与仿真,该系统设计了一个观测器,称为Lipschitz观测器,用于估计一种特殊形式的非线性系统的状态。
2.系统仿真结果

3.核心程序与模型
版本:MATLAB2022a
030
4.系统原理简介
在非线性系统控制领域,观测器设计是一个重要的问题。观测器的目的是根据可测量的系统输出估计系统的内部状态或其他不可直接测量的变量。对于非线性系统,特别是当系统存在不确定性或扰动时,设计一个鲁棒的观测器尤为关键。Lipschitz观测器是一种基于Lipschitz条件的非线性观测器,它对于系统的非线性特性和不确定性具有一定的鲁棒性。
非线性系统广泛存在于实际工程应用中,其观测问题一直是控制领域的研究热点。传统的线性观测器在处理非线性系统时往往难以取得满意的效果。为此,基于非线性系统的Lipschitz观测器应运而生,它利用Lipschitz条件对系统进行稳定性分析和观测器设计,取得了良好的效果。
4.1非线性系统及观测器概述

在许多实际应用中,系统的某些或所有状态变量可能无法直接测量,因此需要设计一个观测器来估计这些不可见的状态。Lipschitz观测器正是针对这样的问题而提出的一种方法。
4.2 Lipschitz观测器原理
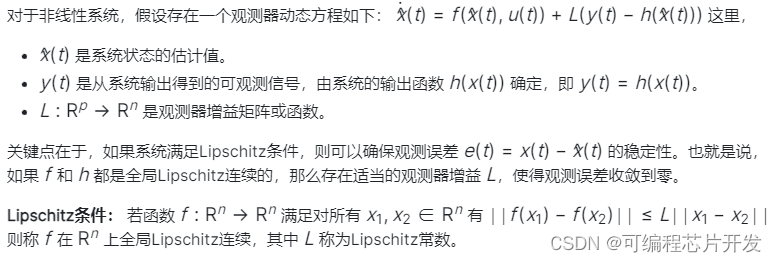
设计观测器时的目标是在满足系统动态和观测信息的基础上选择合适的 LLL,以保证观测误差系统的渐近稳定,从而有效地估计出真实的系统状态。
在实际应用中,构建Lipschitz观测器往往需要利用Lyapunov稳定性理论、微分几何等工具,设计观测器增益矩阵 LLL,并证明观测误差系统的稳定性。
5.完整工程文件
v



-Linux ARM驱动编程第三天-ARM Linux ADC和触摸屏开发 (物联技术666))




)





)




