1.1 汽车工业中的天线阵列:应用和频率范围
无线通信系统的发展需要新的技术来支持更高质量的通信、新的服务和应用。近年来,汽车无线通信市场得到了极大的扩展。现代汽车使用不同的服务:AM/FM收音机、卫星广播(SDARS)、移动电话通信、数字音频广播(DAB)、远程无钥匙进入(RKE)、胎压监测(TPMS)和远程启动发动机(RSE)系统、电视、无处不在的智能交通系统(ITS),其中包括全球定位系统(GPS)数据、电子收费(ETC)、车辆信息和通信服务(VICS)、碰撞安全雷达装置等[1]。
众所周知,天线是实现通信系统高性能的关键因素。如今,带有分集装置的定向天线阵列或多天线系统在汽车应用中越来越受欢迎。阵列天线的优势在由周围建筑物反射或街道或高速公路上大量汽车反射引起的多径衰落环境中非常显着。在过去的十年中,有关天线阵列在汽车无线通信系统中的应用的研究呈爆炸式增长。具有定向辐射方向图的天线阵列具有更高的增益和对干扰源的抗干扰性;智能天线阵列能够动态适应噪声环境,对噪声源产生零值,对期望的角度方向产生高增益。多输入多输出或MIMO系统使用发射机或接收机侧(有时是发射机和接收机侧)的一些天线阵元,增加了覆盖面积并提高了多径鲁棒性。
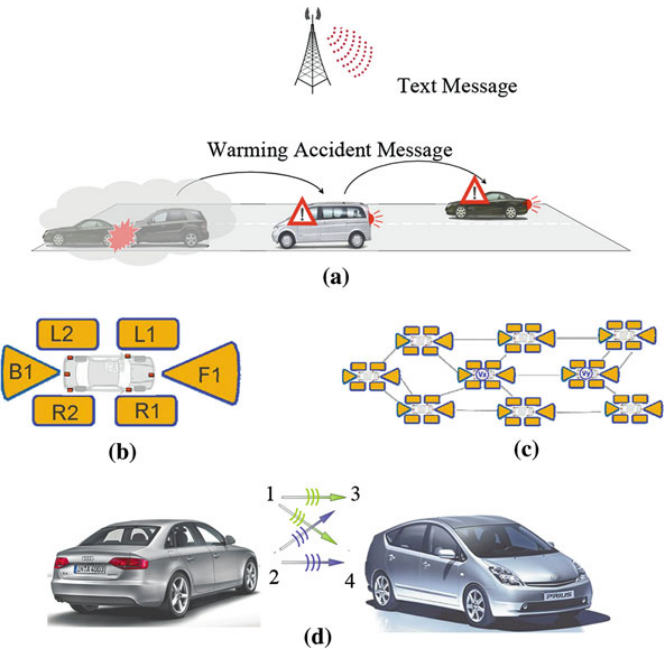
图1.1 智能交通系统概念:a、b、c车对车、车对基站通信场景;d 2 *2 MIMO汽车系统拓扑
1.1.1 智能交通系统
1.1.1.1 车对车和车对基础设施通信系统包括MIMO设计
众所周知[2],包含交通基础设施和车辆的智能交通系统(ITS)提高了交通安全、运输生产率和出行可靠性。最新的车际和车对基础设施通信技术之一允许汽车彼此“交谈”。这种类型的无线系统基于车辆自组织网络(VANET)[3],允许汽车在大约100-300米的距离内相互通信。如图1.1a所示,智能车对车(C2C)或车对基础设施(C2I)通信为驾驶员提供以下信息:
•道路状况,进入交叉路口和高速公路的警告,报告事故和交通堵塞,变道警告和低能见度范围,汽车之间的碰撞安全距离
•有关商业地点、加油站和汽车服务的旅行数据
•特定的速度限制,适应性交通灯和其他交通管理数据
•驾驶员辅助,包括车辆停车,高速公路休息区位置,在大型停车场找车,巡航控制等。
最简单的链路架构利用全向车载天线(覆盖车辆周围的所有360°),它支持移动邻居之间的本地自组织无线通信。更复杂的多元定向车载天线系统提高了在多径衰落环境下的接收质量,扩大了通信范围,增加了通信信道容量。图1.1b给出了具有方向可操纵阵列的高吞吐量V2V网络架构。该系统由六个定向天线阵列组成,最大限度地减少了干扰信号,并在六个有限角度扇区扫描最大能量,称为:F1为前面;B1为后面;L1、L2和R1、R2分别“看”左右两侧。图1.1c显示了在同一或不同线路上行驶的两辆相邻车辆之间可能的连接场景。图1.1d显示了2C2 MIMO系统的概念[4 - 7]:安装在一辆车上的两个全向天线单元发射信号(单元号1和2),另一辆车上的两个天线接收信号(单元号3和4)。MIMO系统的简化结构是单输入多输出(SIMO)拓扑结构或多输入单输出(MISO)设计。所介绍的每种配置都有自己的特点、优点和缺点。例如,多样性SIMO系统相对简单;然而,MIMO设计为在多路径环境中提高性能提供了巨大的潜力。
车载多单元系统可分为两大类:单元间距小于波长的紧凑型定向阵列和单元间距可大于工作波长的MIMO分布阵列。定向紧凑型天线将能量集中在相邻行驶的车辆之间,共享车辆之间的通信信息,最大限度地减少来自其他车辆或周围物体的干扰信号。这些天线在汽车和基站之间提供稳定的通信。
智能MIMO天线增加了系统容量(bits/s/Hz),这是一个重要的参数,指定了发射机和接收机之间可能实现可靠通信的最大数据速率。容量值取决于发射和接收天线单元的数量,以及发射和接收天线之间的传播信道统计条件。例如,对于带宽为B、信噪比为ϒ的加性高斯白噪声信道,香农容量为
![]() (1.1)
(1.1)
如果通信系统有N个发射天线和N个接收天线单元,并且发射功率在N个天线之间平均分配,则容量值归一化到带宽B为
![]() (1.2)
(1.2)
由式(1.2)可知,当ϒ/N>>1时,容量与阵元个数N近似成正比。
目前,在欧洲、美国(美国的IEEE 802.11p标准)和日本[8-10]有许多世界性的项目旨在开发用于车际无线通信的电子系统。IEEE 802.11p是IEEE 802.11标准的修订版本,用于在车载环境中增加无线接入。它定义了支持ITS应用所需的802.11(以Wi-Fi销售的产品的基础)增强功能。
IEEE 802.11p标准被用作专用短程频率通信(DSRC)的基础,DSRC是一种中短程业务,旨在支持车对车和车对路边的通信。这种通信涵盖了广泛的应用,包括车对车的安全信息、交通信息、收费、免下车支付等。
通用汽车公司目前正在积极开发VANET,并在凯迪拉克汽车上展示了该系统。宝马、戴姆勒、本田、梅赛德斯和沃尔沃等其他汽车制造商也在研发C2C和C2I通信系统。许多论文描述了C2C和C2I通信技术,反映了网络配置的不同设计方面,例如常见问题[11,12],天线系统的布置和设计[13-15],基于智能天线开发的处理算法[16-19],仿真和测量结果[20-23]。
基于IEEE 802.11技术的短程通信网络可以支持“得来速”互联网服务[24,25]。“得来速互联网”通过在城市或高速公路沿线创建热点,在一段(相对较短的)时间内为行驶中的车辆提供无线局域网(WLAN)访问。如图1.2a所示,一个或多个本地互联接入点形成一个所谓的连接岛,既可以提供本地服务,也可以提供互联网接入。
WLAN工作在以下频段:2.4 GHz,范围为2.4 - 2.485 GHz;5 GHz,范围为5.150 ~ 5.350 GHz和5.470 ~ 5.725 GHz;5.725-5.850 GHz。表1.1总结了各种IEEE 802.11标准的主要参数。表中所示的数据速率是可能的最大值,距离是通信设备之间的最大距离。
表1.2总结了DSRC的主要参数。
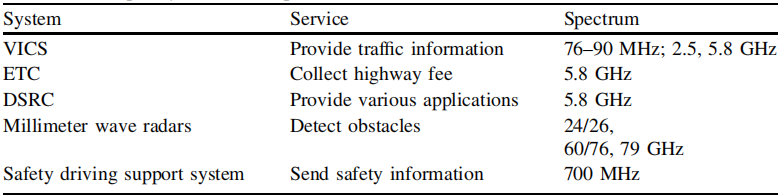
表1.3显示了日本用于ITS的频带。
美国联邦通信委员会(FCC)和欧洲电信标准协会(ETSI)也对电磁辐进行监管。例如,对于增益为6dBi的天线,FCC规则第15.247部分规定的有效各向同性辐射功率(EIRP)必须小于1w。
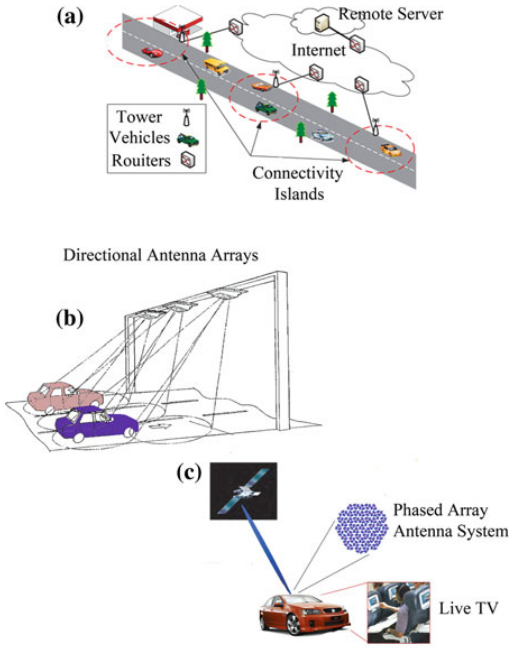
图1.2 (a)“得来速”互联网概念;(b)电子收费拓扑;(c)直接广播卫星(DBS)电视通信
表1.1 IEEE 802.11标准家族
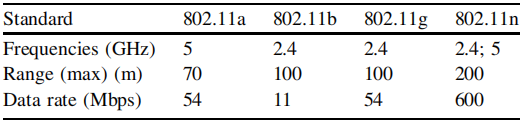
表1.2 DSRC技术:频率和通信特性
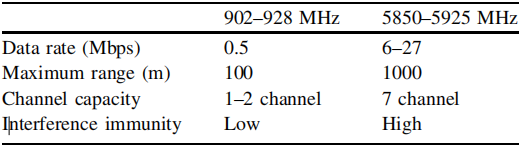
表1.3 日本ITS频率段
基站阵列由十几个或更多的天线阵元组成,这些设备没有尺寸要求,通常安装在道路上。它们有一个中等增益Garray,通常可达15dBi;半波束宽度值为30°~ 60°,尺寸约为0.5 ~ 2 m。这些阵列在方位和仰角方向上都是全向的,在2.4 GHz频段增益约为6 dBi,在5.8 GHz频段增益约为4 dBi。
车辆对路边或车辆对车辆的天线阵列不必降低美观的汽车形状。这一限制决定了紧凑的汽车阵列设计,有时安装在车身的隐藏部分,有2到4个阵元,并减少元件之间的间距。这些天线系统具有小于10 dBi的增益值和更宽的波束宽度(与基站阵列相比)。简单的公式可以估计阵列增益作为两个正交平面Δθx和Δθy(以度为单位)的天线波束宽度的函数[26]
 (1.3)
(1.3)
系数η决定了馈电网络和阵列元件的损耗系数。
表1.4给出假设η = 1(无损天线),根据比值(1.1)计算出的增益值。
表1.4 天线增益作为半功率波束宽度在宽频方向的函数

1.1.1.2 电子收费设计
ETC系统[27]在DSRC频谱中运行,在收费公路上自动收取通行费。ETC的建立是为了替代在收费广场的人工收费。ETC在美国最早的应用之一是1989年在达拉斯北部收费公路上。从那时起,世界各地的许多网站都实施了ETC,以增加道路收入和缓解交通拥堵。基于RFID技术的自动ETC系统由带有标签天线的车载单元(OBU)、带有读取器天线的路边单元(RSU)等组成。当车辆通过收费站时,RSU发出射频询问信号,OBU响应,中心计算机控制系统识别车辆号牌、用户名、邮寄地址、驾驶证,并从用户账户中扣除通行费。ETC可以以不同的方式实现。最简单的方法是使用收费广场,每个车道都有屏障隔开。这种方法减少了流量,但如果没有缴纳过路费,车辆就无法通过。另一种方法是开放道路收费(ORT)。它没有障碍物,没有收费站。先进的系统包括安装在车辆上/内的头顶读取器和应答器。当配备应答器的车辆通过捕获区时,车辆位置与该时刻的特定行驶车道相关联,并且该区域的短长度允许与车辆检测系统精确定时对齐。ORT的主要优点是,用户可以以高速公路的速度开车通过收费广场,而不必减速支付通行费。带定向天线的收费系统通信场景如图1.2b所示。信号由路边天线阵列发射,并由安装在汽车前挡风玻璃上的全向天线(标签天线)接收。应答器通过产生微波信号来响应,该微波信号由存储在标签中的数据编码。发射的信号由路边天线阵列系统接收,该系统解码数据并将此信息转发给计算机以识别车辆。ETC基站天线阵提供高速公路出入口快速可靠的车辆检测。ETC阵列可以作为固定波束系统工作,只覆盖一条车道,或者作为电子相控阵,覆盖几个车道。让我们引入一个概念,“作用范围”,即天线照亮的道路上,RFID标签可以与读取器天线进行交互的区域。它应设计成与车道一样宽的矩形区域,应有足够的长度L,这是由汽车的速度和ETC系统的运行时间决定的。根据日本高速公路产业发展组织公布的全球ETC基本要求[27],当读取器天线安装在高速公路上方5-6 m处时,覆盖单车道的天线的有源通信区长度L约为4 m。需要注意的是,活动区不宜过长。如果有两个或更多的车同时在一个动作范围内,很容易发生混乱。
以下几个读写器天线参数被认为是天线的关键特性:
1)足够的带宽,以获得足够的数据传输速度。
2)有足够的天线增益,以获得读写器与标签之间的距离。
3)适当的主瓣宽度,以覆盖所需的捕获区和低副瓣电平。
4)阅读器天线的信号极化是一个重要因素。例如,水平极化信号通过挡风玻璃会经历更大的衰减,因为挡风玻璃上安装了带有天线的标签应答器。此外,数据表明,水平极化信号可能导致多径反射环境中更高水平的波动。然而,车身可以改变标签系统传输的信号的偏振。因此,垂直、双极化或圆极化阅读器天线设计都是可以接受的。ETC天线阵列的典型波束宽度在水平面上约为30°,在垂直平面上大于30°。
ETC的频率范围如下:欧洲的866-869 MHz,北美和南美的902-928 MHz,日本和一些亚洲国家的950-956 MHz。新标准在北美使用DSRC频段的5.850至5.925 GHz频率,在欧洲使用5.8 GHz频率。新的频率范围提供75 MHz的频率带宽(915 MHz频率只有12 MHz的频率带宽),允许比低频915 MHz频段(0.5 Mbps)更高的数据传输速率(6-27 Mbps),通道容量高达7,而915 MHz频段为1-2。
1.1.1.3 汽车雷达技术应用
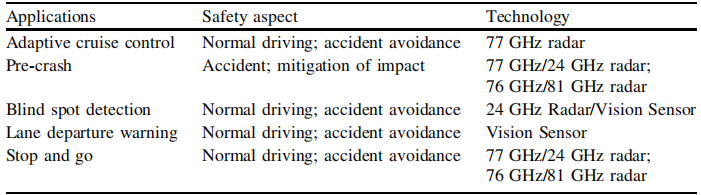
汽车雷达目前非常有吸引力,尽管雷达技术自20世纪70年代以来一直在研究在车辆中使用。市面上有两种不同类型的车载雷达系统,其天线阵列为:远程雷达(LRR)和短程雷达(SRR)[28-30]。图1.3a说明了LRR和SRR系统的各种应用。LRR的工作频率为77 GHz,在150米的距离上分辨率约为3米。
77 GHz雷达技术用于自适应巡航控制(ACC)应用。一个或几个LRR的主瓣控制汽车前方的行驶路径,以确定相对于前方车辆的恒定最小安全距离。
带天线的ACC系统的典型性能指标如下:
a)发射频率= 76-77 GHz;
b)平均发射功率电平\50 dBm(峰值电平为55 dBm);
c)目标距离= 2-150米;
d)距离分辨率±1m;
e)速度分辨率±1 km/h;
f)方位角覆盖=±8°,最小分辨率为3°;
g)俯仰角覆盖= 3°-4°(单波束);
h)天线增益= 26-34 dBi。
SRR系统工作在24 GHz,距离小于30米。SRR系统用于提供侧面、后方和前方碰撞安全、横穿安全、盲点安全以及其他类型的安全增强。
SRR设备的天线规格包括:
a)发射频率= 22-26 GHz;
b)平均发射功率水平\0 dBm(峰值限制为20 dBm);
c)目标探测距离= 0.05 ~ 25 m;
d)方位角覆盖= 55°(典型,3 dB波束宽度);
e)俯仰3dB波束宽度= 15°典型;
f)测距分辨率0.05-0.2 m(取决于应用);
g)量程精度=±5 cm。
SRR的频率带宽约为4-5 GHz。
表1.5显示了SRR系统的一些关键参数的摘要。
表1.6按频段对LRR和SRR进行分类。
许多汽车制造商都使用汽车雷达设备:戴姆勒-奔驰、宝马、捷豹、日产、丰田、本田、沃尔沃、福特、通用等。
盲点信息系统(BLIS)(概念如图1.3b所示)最近被福特引入了几款车型。该系统有助于在正常驾驶时检测盲区车辆,以及在从停车位倒车时从侧面接近的车辆。BLIS使用两个多波束雷达模块,它们被封装在后面的四分之一面板中——每侧一个。雷达识别车辆何时进入盲区,相应侧视镜上的指示器提供车辆正在接近的警告信号。
德尔福后部和侧面探测系统(RSDS)开发了一种单波束单脉冲雷达,有助于驾驶员在变道或转弯时意识到驶近的车辆。德尔福的碰撞缓解系统(CMC)基于雷达技术和视觉传感器,当车辆接近行人或其他车辆时,会发出即将发生碰撞的警告。在使用数字波束形成处理器的24 GHz SRR雷达上获得了令人满意的结果[30]。该系统采用高分辨率MUSIC算法,显著改善了瑞利准则下的常规结果。

图1.3 (a)远程和近程雷达的应用;(b)盲点信息系统概念( 1-过往车辆进入前车盲点;2-前方车辆雷达识别盲区过往车辆;3-对应侧后视镜指示灯点亮) )
表1.5 SRR系统关键参数总结

表1.6 LRR和SRR频率段
1.1.2 调频、数字地面电视和RKE/TPMS设备的空间分集系统
调频广播无线电分集系统广泛采用二元或三元天线[1],其覆盖的频率范围为65 ~ 108 MHz。北美使用87.5到108 MHz的频段,日本的无线电台在76到90 MHz的范围内运行,东欧使用65.8到74.0 MHz,尽管这些国家中的一些国家已经增加了88到108 MHz的频段,并且同时使用两个调频频段,就像俄罗斯的情况一样。空间分集是一种简化的MIMO技术,称为SIMO方法。SIMO系统是车载地面数字视频广播(DVB)电视设备的理想选择。DVB覆盖110 MHz至270 MHz的VHB频段和350 MHz至870 MHz的UHB频段(取决于国家)。
众所周知,基于双接收天线的SIMO(1* 2)方案可以显著增加RKE/RSE系统的通信范围,提高TPS设备的质量。图1.4展示了天线系统接收到的信号由于建筑物和移动车辆的多次反射而产生波动时,SIMO系统在多径衰落传播条件下运行的概念逻辑。图1.4a示意了无线电台与汽车之间的多重传播场景,图1.4b显示了最简单的选择分集系统的框图,该系统包含两个天线、两个低噪声放大器、一个电控开关和一个控制逻辑电路。根据本设计,接收机的输出端检测射频信号,控制逻辑电路(根据具体算法)将第一或第二天线连接到接收机上。最简单的算法包括信号估计,当工作(第一)天线接收到的信号电平低于预定电平时,开关将第二天线连接到车载收音机。一种更复杂的算法包括四种信号电平的估计:来自第一天线,来自第二天线,来自第一和第二天线同相,以及来自第一和第二天线同相180°。图1.4c为位于两个不同车身位置的RKE天线的辐射方向图,图1.4d为组合后的“分集辐射方向图”。测量表明,当使用单个天线时,通信范围从近100米(向相应角度辐射方向图最大值方向)到10米(向相应角度辐射方向图最小方向)不等。使用分集系统时,距离最大通信距离只有20米。
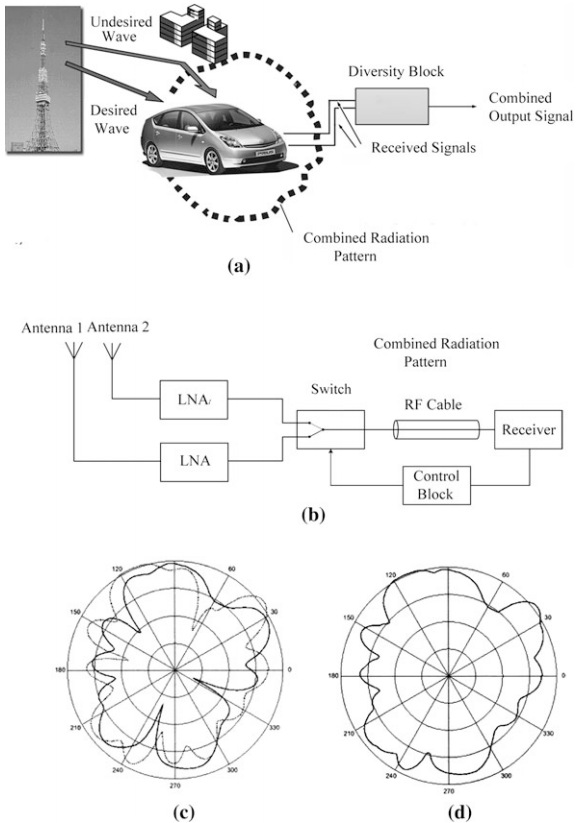
图1.4 (a)车载基站通信的多传播场景;(b)双天线分集接收简单逻辑;(c0单个汽车天线的辐射方向图示例;(d)分集辐射方向图
1.1.3 直接广播卫星电视
安装在车顶上的直播卫星(DBS)电视可操纵波束天线阵列[31-34](图1.2c)工作在微波Ku波段频率范围内,北美和南美为12.2 - 12.7 GHz,欧洲、俄罗斯和非洲为10.7-12.75 GHz,亚洲和澳大利亚为11.7-12.2GHz。汽车上的乘客可以在车辆静止或行驶时观看卫星电视节目。因此,该系统需要配备一个特殊的传感器,以提供最小的搜索来找到卫星。跟踪过程中必须保持最大辐射天线方向图在与卫星角度方向相对应的角度位置。天线系统的主要组成部分是相控阵。经典的相控阵由数百甚至数千个微小的天线元件组成。不同元件的相对相位以这样的方式变化,使得天线阵列在预定的角度方向上辐射最大能量。卫星电视阵列通过对偏振平面波的电调节来接收圆极化或线极化波。例如,为北美和南美设计的阵列可以同时接收右手(RHCP)和左手(LHCP)极化的信号。天线波束宽度在仰角方向和方位角方向变化范围为1.6°~ 3.8°,天线增益为28 ~ 34 dBic。天线必须提供360°方位扫描,仰角扫描角度范围取决于电视卫星的位置。例如,要完全覆盖美国大陆,Direct TV需要仰角范围为20° -65°, EchoStar需要仰角范围为15°-60°。跟踪精度在仰角和方位角上分别约为0.5°和2.0°。极化可在右圆极化(RHCP)和左圆极化(LHCP)之间切换。交叉极化隔离大于25 dB。目前,低成本微带天线阵列是车载卫星电视应用的理想选择。




,java实现)










)

)

)