调制相关的概念
调制:控制载波的参数,使载波参数随调制信号的规律变化
已调信号:受调载波,含有调制信号的全部特征
调制的作用:
- 提高发射效率
- 多路复用,提高信道利用率
- 提高系统抗干扰能力
两种调制方式
线性调制(幅度调制)
线性调制的通用模型
-
一般模型
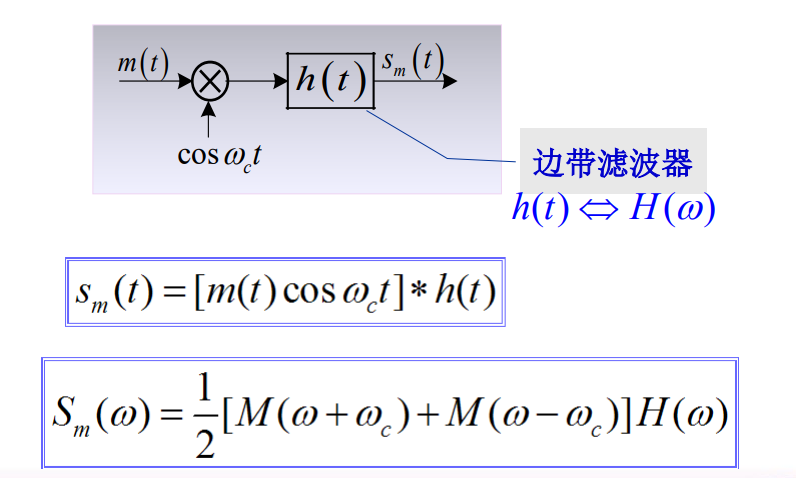
已调信号 s m ( t ) s_m(t) sm(t)的频谱 S m ( w ) S_m(w) Sm(w)只是按照载波的频率进行简单的搬移(线性),故幅度调制称为线性调制 -
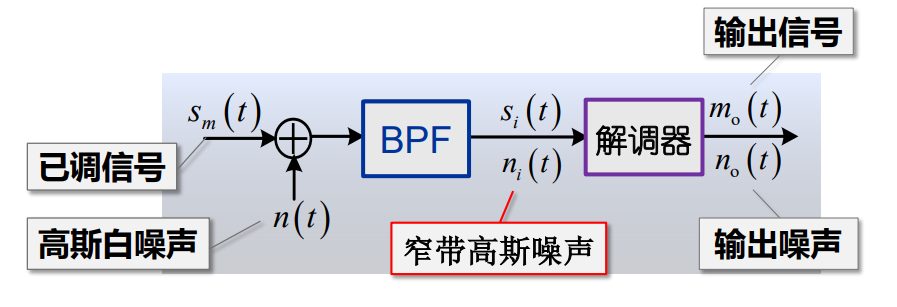
抗噪声性能
-
抗噪声性能指标
输出信噪比 S 0 N 0 = m o 2 ( t ) ‾ n o 2 ( t ) ‾ \frac{S_0}{N_0}=\frac{\overline{m_o^2(t)}}{\overline{n_o^2(t)}} N0S0=no2(t)mo2(t)
调制制度增益(信噪比增益) G = S 0 / N 0 S i / N i G=\frac{S_0/N_0}{S_i/N_i} G=Si/NiS0/N0
输入噪声功率 N i = n 0 B N_i=n_0B Ni=n0B 注意 n 0 n_0 n0为单边功率谱密度(高斯白噪声双边谱密度乘以2)
AM–调幅
已调信号
s A M ( t ) = [ A 0 + m ( t ) ] c o s w c t s_{AM}(t)=[A_0+m(t)]cosw_ct sAM(t)=[A0+m(t)]coswct
A 0 c o s w c t A_0cosw_ct A0coswct:载波项
m ( t ) c o s w c t m(t)cosw_ct m(t)coswct:边带项
S A M ( w ) = π A 0 [ σ ( w + w c ) + σ ( w − w c ) ] + 1 2 [ M ( w + w c ) + M ( w − w c ) ] S_{AM}(w)=\pi A_0 [\sigma (w+w_c)+\sigma (w-w_c)]+\frac{1}{2}[M(w+w_c)+M(w-w_c)] SAM(w)=πA0[σ(w+wc)+σ(w−wc)]+21[M(w+wc)+M(w−wc)]
AM调制需要满足的条件:调制信号 m ( t ) m(t) m(t)和叠加的直流偏量 A 0 A_0 A0需满足 ∣ m ( t ) ∣ m a x ≤ A 0 |m(t)|_{max} \leq A_0 ∣m(t)∣max≤A0
这样就可以使用包络检波的方法恢复原始调制信号,否则就会发生y轴上下混叠,需改用相干解调,失去了AM接受设备要求简单的特性
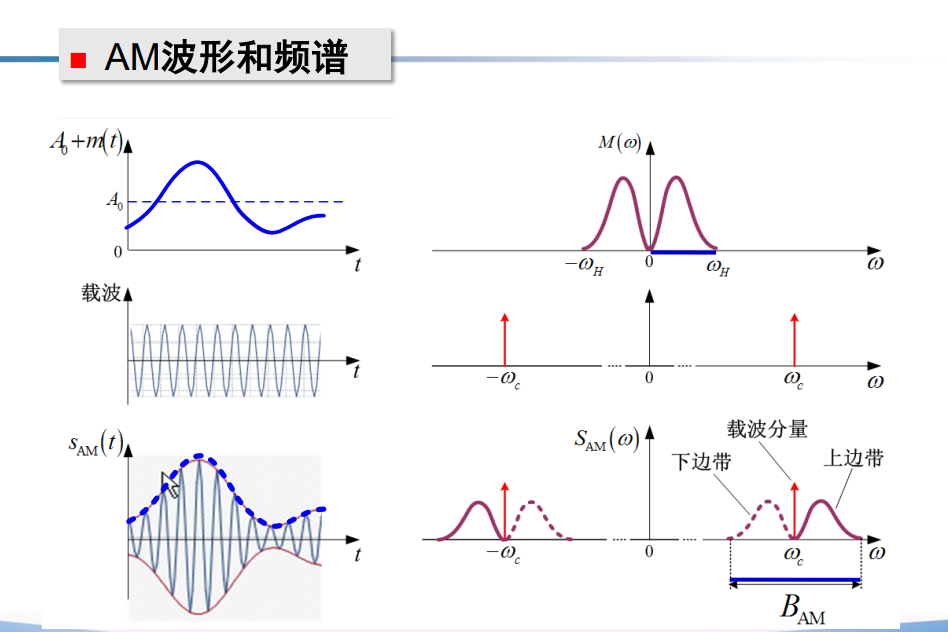
AM已调信号的频谱由载波分量、上边带和下边带组成(使用对称的双边谱在搬移时产生了两个边带)
B A M = 2 f H B_{AM}=2f_H BAM=2fH
画AM已调信号的原则:先用虚线画信号 A 0 + m ( t ) A_0+m(t) A0+m(t)的波形,再画其关于t轴对称波形,阐明了载波的最大幅度包络边界;然后按照载波原有的频率(周期)将其搬移到两个对称波形之间,幅度按照对称波形的包络起伏
调制效率 η A M = P S P A M \eta_{AM}=\frac{P_S}{P_{AM}} ηAM=PAMPS P S P_S PS为边带功率,最大值为 1 3 \frac{1}{3} 31,效率低
条件及引理:
- 通常假设 m ( t ) ‾ = 0 \overline{m(t)}=0 m(t)=0,时间平均为零
- 信号的平均功率等于其均方值
- c o s 2 w c ( t ) ‾ = 1 2 \overline{cos^2w_c(t)}=\frac{1}{2} cos2wc(t)=21
P A M = s A M 2 ( t ) ‾ = 1 2 [ A 0 2 + m 2 ( t ) ‾ ] = P c + P s P_{AM}=\overline{s^2_{AM}(t)}=\frac{1}{2}[A_0^2+\overline{m^2(t)}]=P_c+P_s PAM=sAM2(t)=21[A02+m2(t)]=Pc+Ps
总功率等于载频功率和边带功率之和
AM抗噪声性能–只讨论包络检波
通过包络检波器后的合成包络 E ( t ) = [ A 0 + m ( t ) + n c ( t ) ] 2 + n s ( t ) 2 ) E(t)=\sqrt{[A_0+m(t)+n_c(t)]^2+n_s(t)^2)} E(t)=[A0+m(t)+nc(t)]2+ns(t)2)
- 大信噪比: E ( t ) = A 0 + m ( t ) + n c ( t ) E(t)=A_0+m(t)+n_c(t) E(t)=A0+m(t)+nc(t) 经过电容器后直流分量 A 0 A_0 A0被消除 S o = m 2 ( t ) ‾ S_o=\overline{m^2(t)} So=m2(t) N o = n c ( t ) 2 ‾ = n i ( t ) 2 ‾ = n o B N_o=\overline{n_c(t)^2}=\overline{n_i(t)^2}=n_oB No=nc(t)2=ni(t)2=noB
结论 G A M = 2 3 G_{AM}=\frac{2}{3} GAM=32 - 小信噪比:有门限效应(输出信噪比在输入信噪比小于门限值时急剧下降)
DSB–双边带调制
将AM中的直流偏置去除,就消除了频谱中的载频分量,消除了已调信号表达式的载频项,调制效率为1
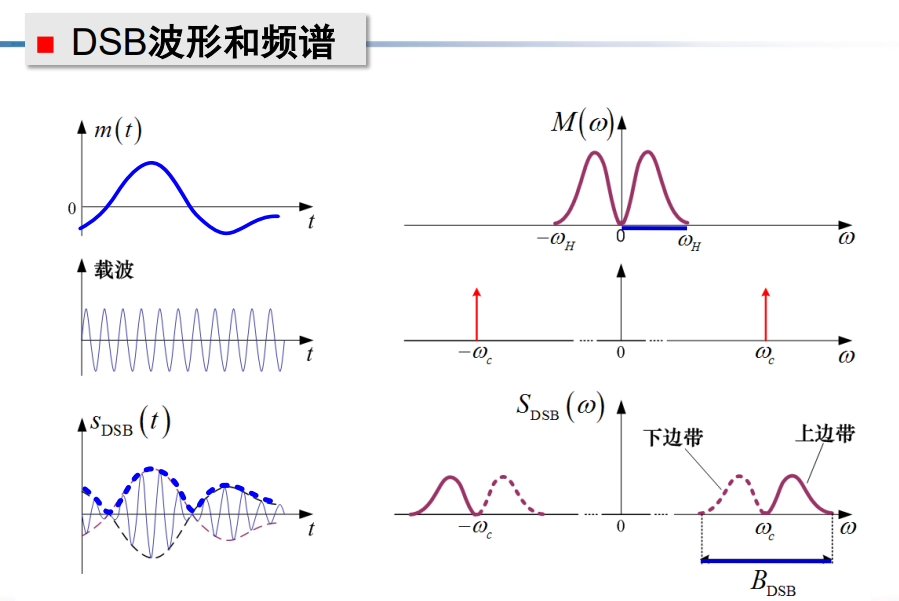
s D S B ( t ) = m ( t ) c o s w c t s_{DSB}(t)=m(t)cosw_ct sDSB(t)=m(t)coswct
S D S B ( w ) = 1 2 [ M ( w + w c ) + M ( w − w c ) ] S_{DSB}(w)=\frac{1}{2}[M(w+w_c)+M(w-w_c)] SDSB(w)=21[M(w+wc)+M(w−wc)]
S i ( t ) = S m 2 ( t ) ‾ = 1 2 m 2 ( t ) S_i(t)=\overline{S_m^2(t)}=\frac{1}{2}m^2(t) Si(t)=Sm2(t)=21m2(t)
经过相干解调乘上同步载波后恢复出来 m o ( t ) = 1 2 m ( t ) m_o(t)=\frac{1}{2}m(t) mo(t)=21m(t)
则 S o ( t ) = m o 2 ( t ) ‾ = 1 4 m 2 ( t ) ‾ S_o(t)=\overline{m_o^2(t)}=\frac{1}{4}\overline{m^2(t)} So(t)=mo2(t)=41m2(t)
由于高斯窄带噪声 n i ( t ) = n c ( t ) c o s w 0 t − n s ( t ) s i n w 0 t n_i(t)=n_c(t)cosw_0t-n_s(t)sinw_0t ni(t)=nc(t)cosw0t−ns(t)sinw0t且窄带噪声及其两个分量的均值相同均为 N i N_i Ni
则同理输出的噪声 n 0 n_0 n0也是其同相分量 n c n_c nc的一半
N o = n o 2 ( t ) ‾ = 1 4 n c 2 ( t ) ‾ = 1 4 N i N_o=\overline{n_o^2(t)}=\frac{1}{4}\overline{n_c^2(t)}=\frac{1}{4}N_i No=no2(t)=41nc2(t)=41Ni
而其正交分量 n i n_i ni被抑制掉
所以 G D S B = 2 G_{DSB}=2 GDSB=2
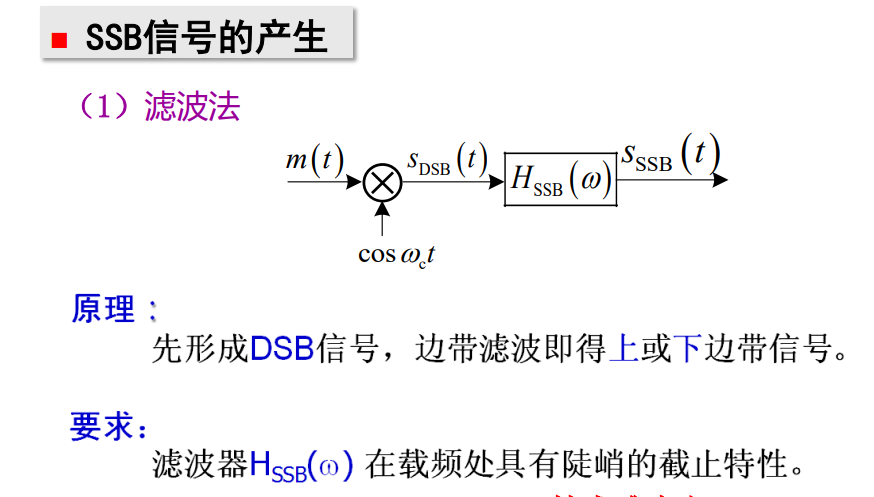
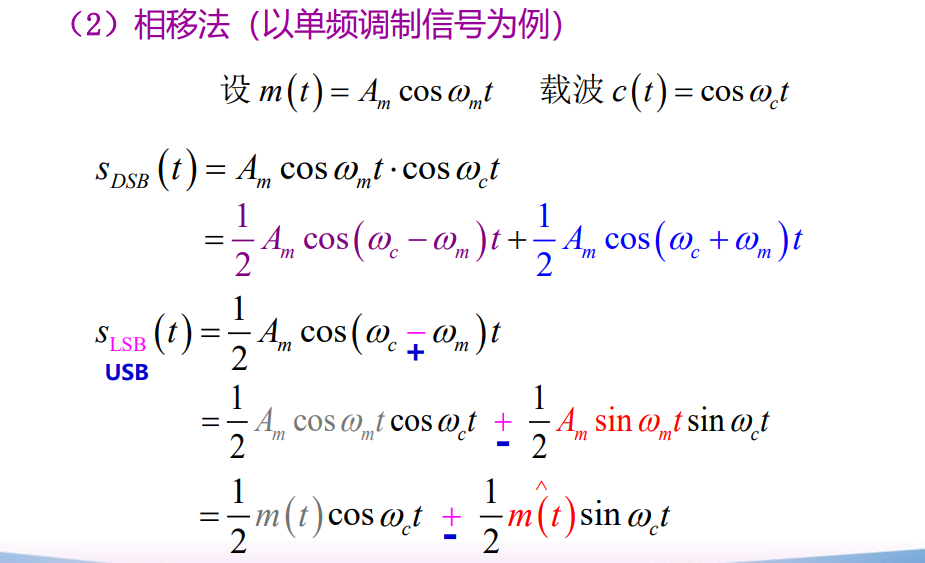
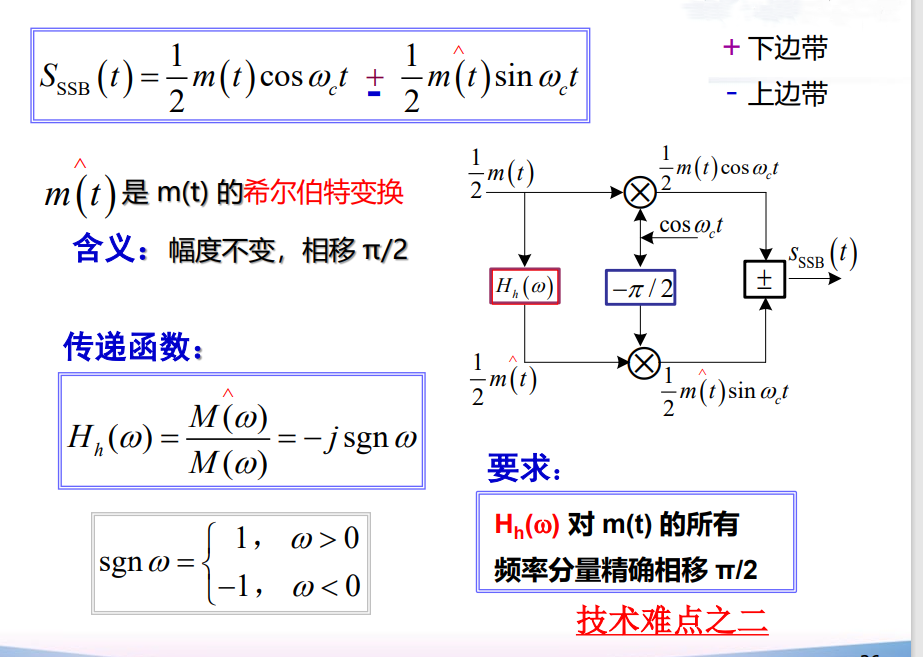
SSB–单边带调制
与DSB相比只传输其上下边带中的一个,节省一半的带宽, B S S B = f H B_{SSB}=f_H BSSB=fH
S i = S S S B 2 ( t ) ‾ = 1 4 m 2 ( t ) ‾ S_i=\overline{S_{SSB}^2(t)}=\frac{1}{4}\overline{m^2(t)} Si=SSSB2(t)=41m2(t)
由于有两个分量的影响 m o ( t ) = 1 4 m ( t ) m_o(t)=\frac{1}{4}m(t) mo(t)=41m(t)
S o = m o 2 ( t ) ‾ = 1 16 m 2 ( t ) ‾ S_o=\overline{m_o^2(t)}=\frac{1}{16}\overline{m^2(t)} So=mo2(t)=161m2(t)
而 N i N_i Ni与 N o N_o No和DSB情况相同
故有 G S S B = 1 G_{SSB}=1 GSSB=1
但两者的抗噪声能力相同(相同带宽)
VSB–残留边带调制
这里以DSB信号通过滤波器为例
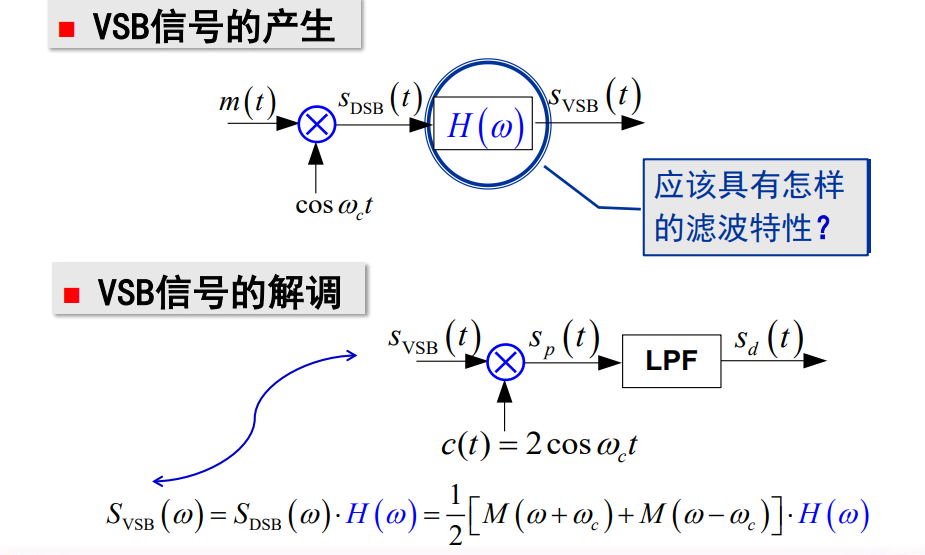
VSB滤波器需满足的条件(载频处互补对称)
H ( w + w c ) + H ( w − w c ) = c o n s t H(w+w_c)+H(w-w_c)=const H(w+wc)+H(w−wc)=const
已调信号的带宽
f H < B V S B < 2 f H f_H<B_{VSB}<2f_H fH<BVSB<2fH
非线性调制(角度调制)
s m ( t ) = A c o s ( w c t + ϕ ( t ) ) s_m(t)=Acos(w_ct+\phi (t)) sm(t)=Acos(wct+ϕ(t))
ϕ ( t ) \phi (t) ϕ(t)称作瞬时相位偏移(相对于载波相位 w c t w_ct wct)
d ϕ ( t ) d t \frac{d\phi(t)}{dt} dtdϕ(t)陈作瞬时频偏(相对于载频 w c w_c wc),这里用到了瞬时相位对时间求导得到瞬时频率
与线性调制相比:
- 较高的抗噪声性能
- 占用更宽的带宽
PM–调相
瞬时相位偏移随调制信号线性变化
S P M ( t ) = A c o s ( w c ( t ) + K p m ( t ) ) S_{PM}(t)=Acos(w_c(t)+K_pm(t)) SPM(t)=Acos(wc(t)+Kpm(t))调相灵敏度 K p ( r a d / V ) K_p(rad/V) Kp(rad/V)
调相系数 m p = K p A m m_p=K_pA_m mp=KpAm
FM–调频
瞬时频率偏移随调制信号线性变化(瞬时相位偏移随信号积分线性变化)
S F M ( t ) = A c o s ( w c ( t ) + K f ∫ m ( λ ) d λ ) = A c o s [ w c ( t ) + K f A m ∫ c o s w m τ d τ ] = A c o s [ w c ( t ) + K f A m w m s i n w m t ] \begin{aligned}S_{FM}(t)&=Acos(w_c(t)+K_f\int m(\lambda)d\lambda)\\&=Acos[w_c(t)+K_fA_m\int cosw_m\tau d\tau]\\&=Acos[w_c(t)+\frac{K_fA_m}{w_m}sinw_mt]\\\end{aligned} SFM(t)=Acos(wc(t)+Kf∫m(λ)dλ)=Acos[wc(t)+KfAm∫coswmτdτ]=Acos[wc(t)+wmKfAmsinwmt]调相灵敏度 K f ( r a d / ( V ⋅ s ) K_f(rad/(V\cdot s) Kf(rad/(V⋅s)
调频系数 m f = K f A m w m = Δ w w m = Δ f f m m_f=\frac{K_fA_m}{w_m}=\frac{\Delta w}{w_m}=\frac{\Delta f}{f_m} mf=wmKfAm=wmΔw=fmΔf Δ f \Delta f Δf为最大频偏, f m f_m fm相邻变频间隔
带宽(卡森公式,工程近似) B F M = 2 ( m f + 1 ) f m = 2 ( Δ f + f m ) B_{FM}=2(m_f+1)f_m=2(\Delta f+f_m) BFM=2(mf+1)fm=2(Δf+fm)
调频信号的产生:直接调频和间接调频(NBFM-WBFM)
调频信号的解调:
- 非相干解调(NBFM和WBFM)
- 相干解调(NBFM)
调制后总功率不变,功率分配比例与 m f m_f mf有关
输出信噪比(大信噪比) S o N o = 3 2 m f 2 A 2 / 2 n o f m \frac{S_o}{N_o}=\frac{3}{2}m^2_f\frac{A^2/2}{n_of_m} NoSo=23mf2nofmA2/2
制度增益 G F M = 3 m f 2 ( m f + 1 ) G_{FM}=3m_f^2(m_f+1) GFM=3mf2(mf+1)
输出信噪比与调幅信号相比为其 3 m f 2 3m^2_f 3mf2倍

安装keepalived和haproxy)

















