已经过了填坑的黄金时期
环境搭建
交叉编译工具链
很多开源项目需要交叉编译到特定架构上,因此需要安装对应的交叉编译工具链。
sudo apt install gcc-arm-linux-gnueabi g++-arm-linux-gnueabi -y
sudo apt install gcc-aarch64-linux-gnu g++-aarch64-linux-gnu -y
sudo apt install gcc-mips64el-linux-gnuabi64 g++-mips64el-linux-gnuabi64 -y
sudo apt install gcc-mips-linux-gnu g++-mips-linux-gnu -y
sudo apt install gcc-mipsel-linux-gnu g++-mipsel-linux-gnu -y
sudo apt install gcc-mips64-linux-gnuabi64 g++-mips64-linux-gnuabi64 -y
sudo apt install gcc-powerpc-linux-gnu g++-powerpc-linux-gnu -y
sudo apt install gcc-powerpc64-linux-gnu g++-powerpc64-linux-gnu -y
sudo apt install gcc-riscv64-linux-gnu g++-riscv64-linux-gnu -y
sudo apt install gcc-alpha-linux-gnu g++-alpha-linux-gnu -y
sudo apt install gcc-s390x-linux-gnu g++-s390x-linux-gnu -y
sudo apt install gcc-sparc64-linux-gnu g++-sparc64-linux-gnu -y
gdb & gdbserver
安装 gdb-multiarch 。
sudo apt install gdb-multiarch
交叉编译多个架构的 gdbserver 静态版本。注意编译的 gdb 版本最好和本机 gdb 版本相同。
curl https://ftp.gnu.org/gnu/gdb/gdb-9.2.tar.gz --output gdb-9.2.tar.gz
tar -zxvf ./gdb-9.2.tar.gz
cd gdb-9.2# arm-32-little gdbserver
mkdir build_arm_static && cd build_arm_static
CC="arm-linux-gnueabi-gcc" CXX="arm-linux-gnueabi-g++" ../gdb/gdbserver/configure --target=arm-linux-gnueabi --host="arm-linux-gnueabi"
make LDFLAGS=-static -j $(nproc) && cd ..# mips-32-little gdbserver
mkdir build_mipsel_static && cd build_mipsel_static
CC="mipsel-linux-gnu-gcc" CXX="mipsel-linux-gnu-g++" ../gdb/gdbserver/configure --target=mipsel-linux-gnu --host="mipsel-linux-gnu"
make LDFLAGS=-static -j $(nproc) && cd ..# mips-32-big gdbserver
mkdir build_mips_static && cd build_mips_static
CC="mips-linux-gnu-gcc" CXX="mips-linux-gnu-g++" ../gdb/gdbserver/configure --target=mips-linux-gnu --host="mips-linux-gnu"
make LDFLAGS=-static -j $(nproc) && cd ..# mips64-64-little gdbserver
mkdir build_mips64el_static && cd build_mips64el_static
CC="mips64el-linux-gnuabi64-gcc" CXX="mips64el-linux-gnuabi64-g++" ../gdb/gdbserver/configure --target=mips64el-linux-gnuabi64 --host="mips64el-linux-gnuabi64"
make LDFLAGS=-static -j $(nproc) && cd ..# mips64-64-big gdbserver
mkdir build_mips64_static && cd build_mips64_static
CC="mips64-linux-gnuabi64-gcc" CXX="mips64-linux-gnuabi64-g++" ../gdb/gdbserver/configure --target=mips64-linux-gnuabi64 --host="mips64-linux-gnuabi64"
make LDFLAGS=-static -j $(nproc) && cd ..# powerpc-32-big gdbserver
mkdir build_ppc_static && cd build_ppc_static
CC="powerpc-linux-gnu-gcc" CXX="powerpc-linux-gnu-g++" ../gdb/gdbserver/configure --target=powerpc-linux-gnu --host="powerpc-linux-gnu"
make LDFLAGS=-static -j $(nproc) && cd ..# aarch64-64-little gdbserver
mkdir build_aarch64_static && cd build_aarch64_static
CC="aarch64-linux-gnu-gcc" CXX="aarch64-linux-gnu-g++" ../gdb/gdbserver/configure --target=aarch64-linux-gnu --host="aarch64-linux-gnu"
make LDFLAGS=-static -j $(nproc) && cd ..
CC="mipsel-linux-gnu-gcc":指定 C 编译器为mipsel-linux-gnu-gcc。这告诉配置脚本在编译期间使用指定的 C 编译器。CXX="mipsel-linux-gnu-g++":指定 C++ 编译器为mipsel-linux-gnu-g++。这告诉配置脚本在编译期间使用指定的 C++ 编译器。../gdb/gdbserver/configure:运行configure脚本,它是一个用于自动配置软件的常见脚本。--target=mipsel-linux-gnu:指定目标平台为mipsel-linux-gnu。这告诉配置脚本生成针对mipsel-linux-gnu平台的交叉编译配置。--host="mipsel-linux-gnu":指定主机平台为mipsel-linux-gnu。这告诉配置脚本生成适用于mipsel-linux-gnu主机平台的编译配置。
有些环境恶劣到这种静态编译 gdbserver 都跑不起来可以考虑尝试能不能将 qemu 虚拟机联网,然后 apt 安装 gdb-multiarch 顺带将 gdbserver 下载下来。
qemu
sudo apt-get install qemu-user qemu-system
将交叉编译工具链添加到对应的 qemu-binfmt,这样 linux 可以根据文件头找相应的程序及方法运行。
sudo ln -s /usr/mipsel-linux-gnu/ /etc/qemu-binfmt/mipsel
Firmadyne
git clone https://github.com/attify/firmware-analysis-toolkit.git
cd firmware-analysis-toolkit
sudo ./setup.sh
之后配置 fat.config 文件,将 sudo_password 改成正确的值,firmadyne_path 不需要改。
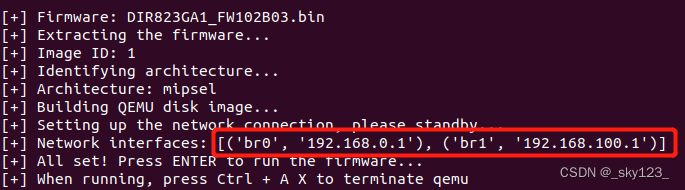
仿真的方式是 fat.py + 固件的路径名
$ ./fat.py <firmware file>
在我的环境下使用 python3 fat.py <firmware file> 命令运行会出现固件解压失败的问题;<firmware file> 不使用绝对路径也会出错,需要注意一下。
运行后 FAT 能正常识别出网卡信息说明能够仿真成功,之后按回车键就可以把系统跑起来。
IoT-vulhub
汇编基础
ARM32
关于汇编
由于 ida 对 arm 汇编进行了“美化”,因此我们通过 ida 看到的不是原生的 arm 汇编。这里我们借助 catstione 和 keystone-engine 库定义了几个辅助函数方便查看原生汇编。
from keystone import *
from capstone import *
import idcasmer =Ks(KS_ARCH_ARM,KS_MODE_ARM)
disasmer=Cs(CS_ARCH_ARM,CS_MODE_ARM)def disasm(machine_code, addr=0):l = ""for i in disasmer.disasm(machine_code, addr):l += "{:8s} {};\n".format(i.mnemonic, i.op_str)return l.strip('\n')def asm(asm_code, addr=0):l = b''for i in asmer.asm(asm_code, addr)[0]:l += bytes([i])return ldef get_disasm(addr):return disasm(idc.get_bytes(addr, idc.next_head(addr) - addr), addr)def get_asm(addr):return asm(get_disasm(addr), addr)def get_code(start, end):cur = startcode = ""while cur < end:code += "0x%08x %s\n"%(cur, get_disasm(cur))cur = idc.next_head(cur)return code
寄存器和指令基本格式
寄存器
| 寄存器名称 | 寄存器描述 |
|---|---|
| R0 | 函数的第1个参数, 以及保存函数返回的结果 |
| R1 - R3 | 保存函数的第2~4个参数 |
| R4 – R8 | 通用寄存器,其中R7在系统调用时存储调用号 |
| R9 | 平台相关 |
| R10 | 通用寄存器, 可用于保存局部变量 |
| R11/FP | 栈帧指针, 用于记录栈帧 |
| R12 | 过程间调用, 保存函数及其调用的子函数之间的立即数 |
| R13/SP | 栈指针, 指向栈顶 |
| R14/LR | 链接寄存器, 用于保存子函数调用的返回地址 |
| R15/PC | 程序计数器, 保存当前执行指令地址+8 |
| CSPR | 当前程序状态寄存器 |
在 pwndbg 项目的 pwndbg/lib/regs.py 中可以修改寄存器显示。
arm = RegisterSet(retaddr=("lr",),flags={"cpsr": arm_cpsr_flags},gpr=("r0", "r1", "r2", "r3", "r4", "r5", "r6", "r7", "r8", "r9", "r10", "r11", "r12", "lr"),args=("r0", "r1", "r2", "r3"),retval="r0",
)
常用指令
| 指令 | 描述 | 指令 | 描述 |
|---|---|---|---|
| MOV | 移动数据 | EOR | 按位异或 |
| MVN | 移动并取反 | LDR | 加载 |
| ADD | 加 | STR | 存储 |
| SUB | 减 | LDM | 加载多个 |
| MUL | 乘 | STM | 存储多个 |
| LSL | 逻辑左移 | PUSH | 入栈 |
| LSR | 逻辑右移 | POP | 出栈 |
| ASR | 算术右移 | B | 跳转 |
| ROR | 循环右移 | BL | 跳转并将返回地址保存到LR寄存器 |
| CMP | 比较 | BX | 跳转并切换Arm/Thumb模式 |
| AND | 按位与 | BLX | 跳转,保存返回地址,并切换ARM/Thubmb模式 |
| ORR | 按位或 | SWI/WVC | 系统调用 |
总体设计和指令规格
- 没有隐式内存操作指令
- 0-3个操作数,内存操作数和立即数不能同时存在,内存操作数至多出现1次,寄存器操作数总在最前
特殊情况:
- C标志位使用
- 读PC寄存器
断点
在 IDA 调试中,无论是断点还是单步调试都是依靠 #UND 0x10 触发断点实现,且 IDA 调试器 无法分辨出改指令是否是自己设置的,在读取数据时会按实际情况返回数据。
该指令在 Arm 模式和 Thumb 模式的硬编码不同:
- Arm 模式断点:
F0 01 F0 E7 - Thumb 模式断点:
10 DE
PC寄存器相关指令
MOV PC, R0:相当于PC = R0MOV R0, PC- 在 Arm 模式中相当于
R0 = PC + 8 - 在 Thumb 模式中相当于
R0 = PC + 4
- 在 Arm 模式中相当于
LDR R0, [PC,#x]
可以看做 3 步:- 读 PC 寄存器的值,规则与
MOV R0, PC相同,即根据处于 Arm 或 Thumb 模式加上相应的偏移 - 将读出的值再加上偏移 x 作为地址,然后将地址向下取整做 4 字节对齐
- 从计算出的地址的值读入到 R0 寄存器中
- 读 PC 寄存器的值,规则与
条件和标志位响应
CPSR 寄存器
CPSR 寄存器结构如下图所示:
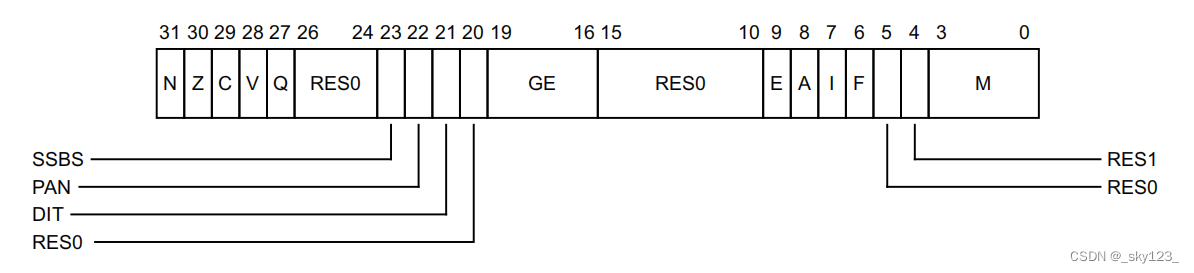
各标志位含义:
N,bit[31]
若运算结果为 0 或正数则该该标志位置 0,若运算结果为负数则该标志位置 1 。Z,bit[30]
运算结果为 0 则置 1,否则置 0 。C,bit[29]
无符号数溢出,加法溢出置 1,减法溢出置 0。V,bit[28]
有符号数溢出T,bit[5]T = 0表示 Arm 模式T = 1表示 Thumb 模式。
注意:指令是否影响标志位取决于是否是否加 S 后缀(大多数情况,具体看指令硬编码第 20 位是否置 1),比如 MOV 不影响标志位但 MOVS 影响标志位。
执行条件
cond 标志的值及其对应含义如下表所示:
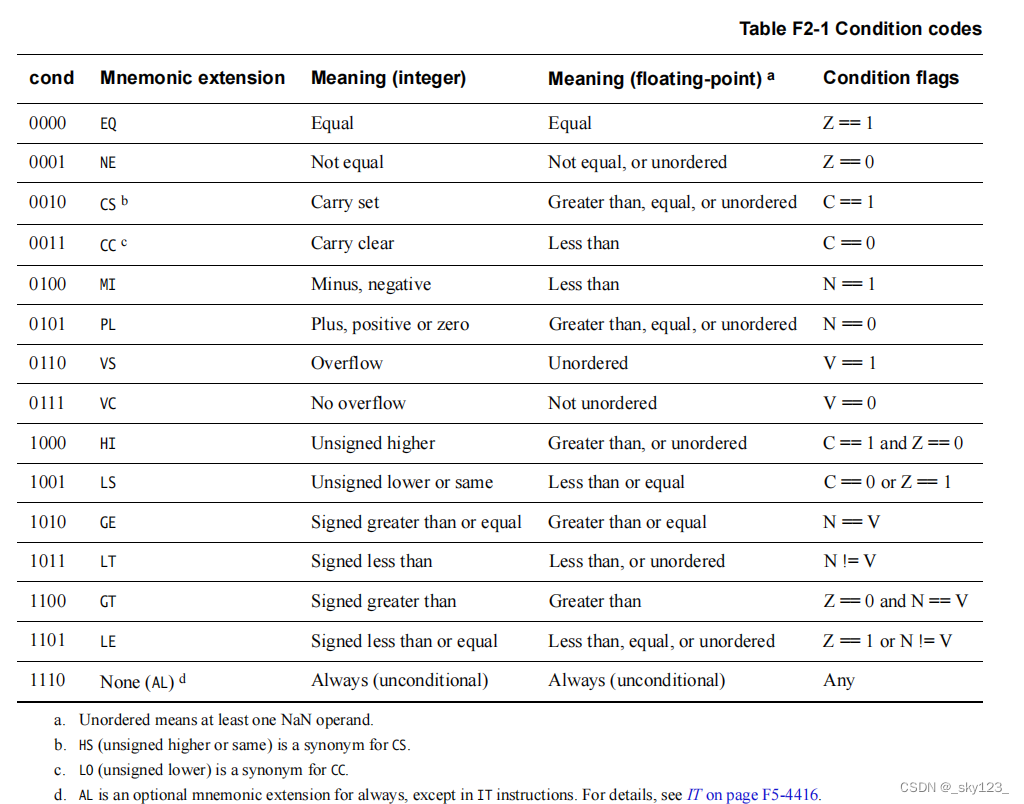
cond 标志位位于指令硬编码的高 4 比特,在执行时根据标志寄存器决定该指令是否执行。
MOV 指令
MOV 不访问内存,因此操作数只能是寄存器或立即数。
MOV 立即数
由于 ARM 汇编指令长度的影响,对立即数范围有严格的限制。允许 MOV 的立即数有如下几类:
- 立即数不超过 16 位

该指令在给寄存器低 16 比特赋值的同时会将寄存器高 16 比特清零。 - 立即数可以用 不超过8 比特的数循环右移不超过 32 的偶数得到

其中 imm12 中的低 8 比特是需要循环右移的数,高 4 比特乘 2 是需要循环右移的次数。 - (MOVT)立即数不超过 16 位且需要移动到寄存器高 16 位(通常与 MOV 配合使且应当先 MOV 后 MOVT)

该指令在给寄存器高 16 比特赋值的同时不会将寄存器低 16 比特清零。
MOV 寄存器, 寄存器
- 寄存器 + 立即数移位

例如MOV R0, R1,LSL#4,该指令等同于LSL R0, R1,#4。
移位类型由 stype 决定,移位的值为 imm5 。 - 寄存器 + 寄存器移位

例如MOV R0, R1,LSR R2,该指令等同于LSR R0, R1,R2。
基本整型运算
相关指令
ADD:加ADR:PC 与操作数相加结果放入结果寄存器中ADRL:伪指令,与ADR相似,不过通过类似MOV + MOVT的方式使得寻址范围更大CMN:加,只影响标志寄存器
SUB:减CMP:减,只影响标志寄存器
RSB:反减AND:与TST:与,只影响标志寄存器
BIC:第二个操作数与第三个操作数的反码逻辑与结果放在第一个寄存器中ORR:或EOR:异或TEQ:异或,只影响标志寄存器
LSL:逻辑左移LSR:逻辑右移ASR:算术右移
ADD 指令(举例)
- ADD 立即数

这里 12 比特长的立即数与前面 MOV 的机制一样,采用移位的方式将其扩展为 32 位范围。 - ADD 寄存器,立即数移位

与 MOV 机制相同,例如ADD R0, R1, R2,LSL #4。 - ADD 寄存器,寄存器移位

- ADR
本质还是 ADD,不过被加数为 PC 寄存器。由于设计到读 PC 寄存器,因此根据当前所处的模式,读出来的 PC 寄存器的值会加上相应的偏移。
访存指令
数据流向
- LDR:
寄存器 ← 内存,例:ldr r0, [pc, #8],ldr r3, [r5], #4。 - STR:
寄存器 → 内存,例:str r3, [r4]。
操作的寄存器和内存地址
- 寄存器:
LDR R0, [R1] - 寄存器 + 偏移(立即数):
LDR R0, [R1,#4]

- 12 位立即数即偏移,不存在移位扩展。
- U 为立即数的正负号。
- P = 0 则外偏移,W = 1 则内偏移,内外偏移不能同时存在。
- 寄存器 + 移位偏移(寄存器):
-
LDR R0, [R1,R2,LSL #4]

-
LDR R0, [R1,R2,LSL R3]
-
后续的附加行为
- 内偏移:
LDR R0, [R1,#4]!
该指令表示将[R1 + 4]赋值给 R0 ,然后将 R1 的值设为R1 + 4。 - 外偏移:
LDR R0, [R1],#4
该指令表示将[R1]赋值给 R0 ,然后将 R1 的值设为R1 + 4。
注意:外偏移和内偏移不能同时存在。
根据附加附加行为性质可知:
PUSH R0相当于STR R0, [SP,#-4]!POP R0相当于LDR R0, [SP],#4
块访存指令
指令结构
LDM\STM+后缀 寄存器(!), {寄存器组}
- LDM 表示将寄存器指向的地址的数据依次存放在寄存器组中。
- STM 表示将寄存器组中的数据依次存放在寄存器指向的地址。
- 寄存器组可以写作范围,比如
{R0-R4};也可指定具体寄存器,比如{R0,R2,R3}。但是读写操作是按照寄存器下标的顺序依次操作寄存器组中的寄存器(编号小的在低地址),因为指令对应硬编码无法体现出寄存器组的顺序。
以 LDM 为例:

后缀类型
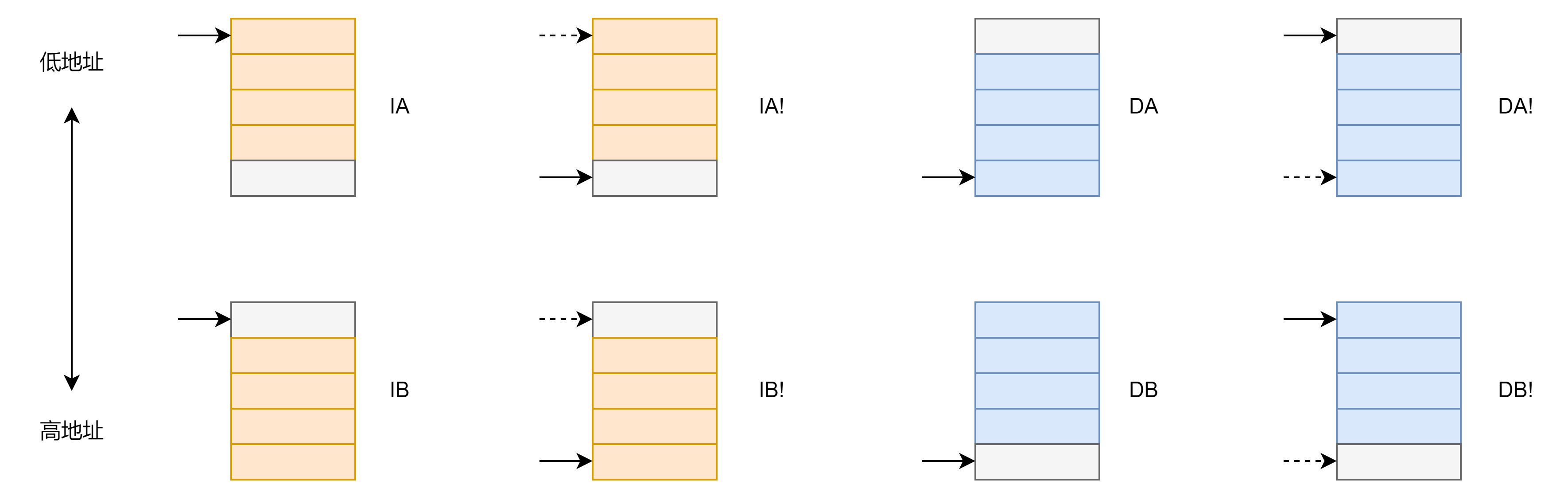
- I 表示地址加;D 表示地址减。
- A 表示先读写内存,再改变指向;B 表示先改变指向,再读写内存。
- 带 ! 表示修改的指向写入寄存器;不带 ! 表示修改的指向不写入寄存器。
- 如果操作地址寄存器为 SP 时LDMFD 相当于 LDMIA ;STMFD 相当于 STMDB 。
根据不同后缀类型的性质可以确定如下用法:
- STMFD 相当于 PUSH
- LDMFD 相当于 POP
- STM\LDMIA 可以快速复制内存
分支和模式切换
B + imm

- 跳转目标:立即数
- 模式切换:不带模式切换
- 写入 LR 的值:不影响 LR 寄存器
指令编码的立即数为目标地址与 PC 寄存器的差值除 4 。由于涉及读 PC 寄存器,因此根据当前模式要加上相应的偏移。跳转范围为 PC 值加上正负 32M 的偏移。
BL + imm

- 跳转目标:立即数
- 模式切换:不带模式切换
- 写入 LR 的值:
下一条指令的地址 | T 标志位
BX + reg

- 跳转目标:寄存器中的值去掉最低一位
- 模式切换:跳转时将寄存器中存储的地址的最低一位写入 T 标志位
- 写入 LR 的值:不影响 LR 寄存器。
BLX + imm

- 跳转目标:立即数
- 模式切换:一定切换模式
- 写入 LR 的值:
下一条指令的地址 | T 标志位
BLX + reg

- 跳转目标:寄存器中的值去掉最低一位
- 模式切换:跳转时将寄存器中存储的地址的最低一位写入 T 标志位
- 写入 LR 的值:
下一条指令的地址 | T 标志位
拓展
BX reg和MOV PC, reg的区别:BX 可以切换模式,MOV 不能切换模式。LDR PC, [R0]:可以做模式切换,常用于 PLT 表中调用 GOT 表中对应的函数地址(最低位表示模式)。LDMFD SP!, {R11,PC}:同样可以做模式切换,常与STMFD SP!, {R11,PC}一起用于函数调用时保存栈帧和返回地址。
Thumb 模式
特点
- 段指令一般不使用 R8-R12
- 一般没有条件码和标志响应位,指令默认影响标志位
- 运算指令优先对第一,第二操作数相同情况有短指令编码。对于 STMFD 和 LDMFD,如果以 SP 寄存器的值作为地址则简写为 PUSH 和 POP 。
IT 块
结构如下图:
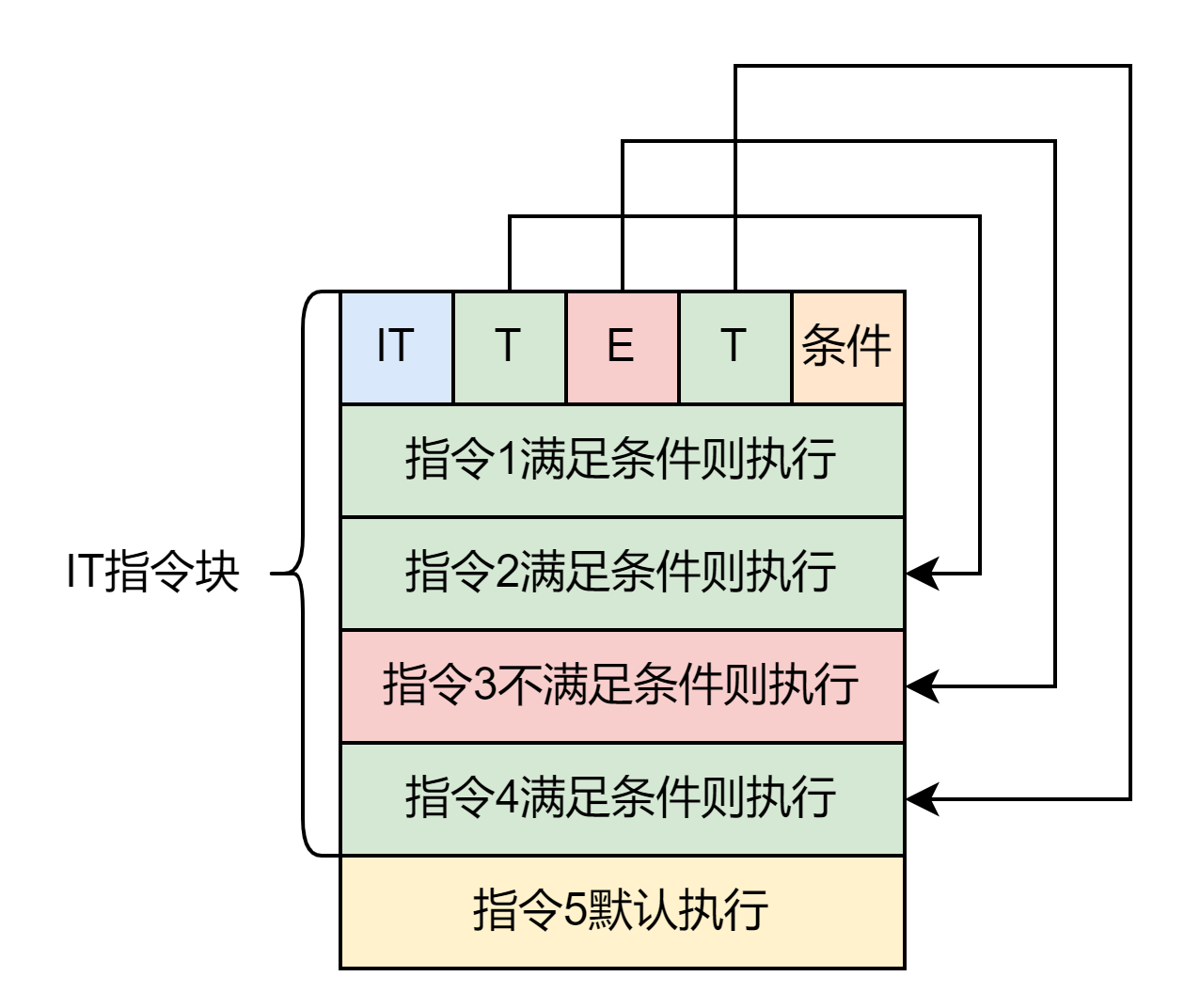
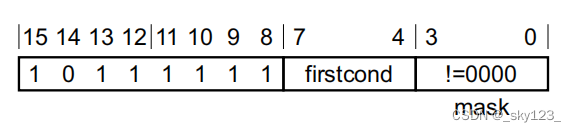
IT 指令的 mask 编码为从高到低,T 为 0,E 为 1 ,最后填一个 1 表示结束。比如 ITTEE EQ 的 mask 的二进制形式为 0111 。
调用约定
- 前 4 个参数:R0-R3,其它参数栈传递
- 非异变寄存器:R4-R11,使用此类寄存器的函数负责恢复寄存器原来的值。
- R11/FP:栈帧指针,类似 EBP。
- R12:导入表寻址
函数示例:
0x00010570 push {fp, lr}; ; 保存 FP 和 LR 寄存器,其中 FP 寄存器在栈顶。
0x00010574 add fp, sp, #4; ; FP 寄存器指向保存返回地址的位置。
0x00010578 sub sp, sp, #0x20; ; 抬升栈顶,开辟栈空间。
0x0001057C sub r3, fp, #0x24; ; R3 寄存器指向局部变量 char s[0x24] 开头,也就是栈顶。
0x00010580 mov r2, #0x20; ; memset 参数3
0x00010584 mov r1, #0; ; memset 参数2
0x00010588 mov r0, r3; ; memset 参数1
0x0001058C bl #0x10410; ; 调用 memset@plt
0x00010590 ldr r0, [pc, #0x40]; ; 由于是 ARM 模式,因此是取 0x00010590 + 8 + 0x40 = 0x000105D8 地址处的值。考虑到 ARM 的访存能力,编译器会为每个函数创建一个地址表来记录全局变量的地址。
0x00010594 bl #0x103d4; ; 调用 puts@plt
0x00010598 ldr r0, [pc, #0x3c];
0x0001059C bl #0x103d4;
0x000105A0 ldr r0, [pc, #0x38];
0x000105A4 bl #0x103d4;
0x000105A8 ldr r0, [pc, #0x34];
0x000105AC bl #0x103bc;
0x000105B0 sub r3, fp, #0x24; ; R3 寄存器指向局部变量 char s[0x24] 开头。
0x000105B4 mov r2, #0x38; ; read 第 3 个参数
0x000105B8 mov r1, r3; ; read 第 2 个参数
0x000105BC mov r0, #0; ; read 第 1 个参数
0x000105C0 bl #0x103c8; ; 调用 read@plt
0x000105C4 ldr r0, [pc, #0x1c];
0x000105C8 bl #0x103d4;
0x000105CC mov r0, r0;
0x000105D0 sub sp, fp, #4; ; SP = FP - 4 ,即指向了栈上保存 FP 寄存器的值的位置。
0x000105D4 pop {fp, pc}; ; 恢复 FP 和 PC 寄存器。.text:000105D8 B0 06 01 00 off_105D8 DCD aForMyFirstTric ; DATA XREF: pwnme+20↑r
.text:000105D8 ; "For my first trick, I will attempt to f"...
.text:000105DC 10 07 01 00 off_105DC DCD aWhatCouldPossi ; DATA XREF: pwnme+28↑r
.text:000105DC ; "What could possibly go wrong?"
.text:000105E0 30 07 01 00 off_105E0 DCD aYouThereMayIHa ; DATA XREF: pwnme+30↑r
.text:000105E0 ; "You there, may I have your input please"...
.text:000105E4 90 07 01 00 off_105E4 DCD format ; DATA XREF: pwnme+38↑r
.text:000105E4 ; "> "
.text:000105E8 94 07 01 00 off_105E8 DCD aThankYou ; DATA XREF: pwnme+54↑r
.text:000105E8 ; "Thank you!"
对应反编译代码如下:
int pwnme()
{char s[36]; // [sp+0h] [bp-24h] BYREFmemset(s, 0, 0x20u);puts("For my first trick, I will attempt to fit 56 bytes of user input into 32 bytes of stack buffer!");puts("What could possibly go wrong?");puts("You there, may I have your input please? And don't worry about null bytes, we're using read()!\n");printf("> ");read(0, s, 0x38u);return puts("Thank you!");
}
MIPS32
寄存器
通用寄存器
MIPS 有 32 个通用寄存器 (General purpose registers),以美元符号 ($) 表示。可以表示为 $0~$31,也可以用寄存器名称表示如,$sp、 $t9 、$fp 等等。
| 寄存器 | 名称 | 用途 |
|---|---|---|
| $0 | $zero | 常量0 |
| $1 | $at | 保留给汇编器 |
| $2-$3 | $v0-$v1 | 函数调用返回值 |
| $4-$7 | $a0-$a3 | 函数调用参数 |
| $8-$15 | $t0-$t7 | 暂时使用,不需要保存恢复 |
| $16-$23 | $s0-$s7 | 使用需要保存和恢复 |
| $24-$25 | $t8-$t9 | 暂时使用,不需要保存和恢复,$t9 通常与调用函数有关 |
| $28 | $gp | 全局指针,用来充当寄存器间接寻址时的基址寄存器 |
| $29 | $sp | 堆栈指针 |
| $30 | $fp | 栈帧指针 |
| $31 | $ra | 返回地址 |
pwndbg 中的 S8 寄存器对应的是 $fp,而 pwndbg 中的 FP 寄存器貌似是虚拟出来用来表示栈底的,大概就是始终指向每次进一个函数时的栈顶位置。
修改一下 pwndbg/lib/regs.py 中寄存器的定义,让 $ra 寄存器也能显示出来。
# http://logos.cs.uic.edu/366/notes/mips%20quick%20tutorial.htm
# r0 => zero
# r1 => temporary
# r2-r3 => values
# r4-r7 => arguments
# r8-r15 => temporary
# r16-r23 => saved values
# r24-r25 => temporary
# r26-r27 => interrupt/trap handler
# r28 => global pointer
# r29 => stack pointer
# r30 => frame pointer
# r31 => return address
mips = RegisterSet(frame="fp",retaddr=("ra",),gpr=("v0","v1","a0","a1","a2","a3","t0","t1","t2","t3","t4","t5","t6","t7","t8","t9","s0","s1","s2","s3","s4","s5","s6","s7","s8","gp","ra",),args=("a0", "a1", "a2", "a3"),retval="v0",
)
特殊寄存器
MIPS32 架构还定义了 3 个特殊寄存器,分别是 $PC(程序计数器)、$HI (乘除结果高位寄存器)和 $LO (乘除结果低位寄存器)。在进行乘运算的时候,$HI 和 $LO 保存乘法的结果,其中 $HI 保存高 32 位,$LO 保存低 32 位。而在除法运算中,$HI 保存余数,$LO 保存商。
运算指令
MIPS 的运算指令有 ADD ,SUB,MULT,DIV,AND,OR,XOR 等,运算指令有如下特征:
- 运算指令通常带有 3 个操作数,表示为后两个操作数做运算,结果存放在第一个操作数中,以 ADD 为例, 指令
add $d, $s, $t表示$d = $s + $t。 - 运算指令后面会跟一个后缀来描述操作数的类型,以 ADD 指令为例:
- ADD 加法指令,语法为:
add $d, $s, $t。 - ADDI(Add immediate)表示第三个操作数为有符号的立即数,语法为:
addi $t, $s, imm。 - ADDU(Add unsigned)表示操作数是无符号数,语法为:
addu $d, $s, $t。 - ADDIU( Add immediate unsigned)前两个指令特征的叠加,语法为:
addiu $t, $s, imm。
- ADD 加法指令,语法为:
另外移位操作 SL(左移),SR(右移)后面必须跟后缀描述操作类型等,以 SR 为例有如下形式:
- SRA(Shift right arithmetic):算术右移指令,高位补符号位,语法为:
sra $d, $t, h。
注意没有算术左移指令,因为左移不需要区分类型。 - SRL(Shift right logical):逻辑右移指令,高位补 0 ,语法为:
srl $d, $t, h。 - SRLV(Shift right logical variable):移位的位数在寄存器中,语法为:
srlv $d, $t, $s。
条件判断指令
与 X86 和 ARM 架构不同,MIPS 没有状态寄存器,条件判断有专门的指令,并将判断结果存放到指定的寄存器中,这与高级语言比较相似。条件判断指令的形式为 SLT+描述操作数类型的后缀。
以 SLT(Set on less than)为例,语法为 slt $d, $s, $t,表示如果 $s < $t 则将 $d 置 0 ,否则置 1 。
分支跳转指令
跳转指令
跳转指令的操作码长度为 6 比特,因此后面的 26 比特的操作数描述了跳转的地址。因为 MIPS 的指令长度为 4 字节,即每条指令的低 2 位始终为 0,也就是说 26 比特的操作数描述了28 比特长度的地址。因此 MIPS 的地址计算方式为:跳转地址 = (当前指令的起始地址 & 0xF0000000)|(操作数 << 2) 。
比如下面这段汇编:
.text:00400728 register_tm_clones:
...
.text:00400824 CA 01 10 08 j register_tm_clones
跳转指令 j 对应的操作数为 0x081001CA & 0x3FFFFFF,因此跳转地址为 ((0x081001CA & 0x3FFFFFF) << 2)|(0x00400824 & 0xF0000000) = 0x00400728 。
从上面的描述可知,立即数的跳转方式只能跳转 256M 范围的地址区域,要想跳转 32 位的地址范围需要使用寄存器存储跳转地址。
跳转指令有如下几种:
- J(Jump):跳转,后跟立即数,语法为:
j target。 - JAL(Jump and link):跳转并将下一条指令的地址保存在 $ra 寄存器中,语法为:
jal target。 - JR(Jump register)跳转,不过地址存在寄存器中,语法为:
jr $s。
条件跳转指令
条件跳转指会根据条件判断是否跳转。对于 3 个操作数的条件跳转指令,计算机会根据前两个操作数是否满足条件来决定是否跳转,跳转的偏移由第 3 个操作数决定,跳转的计算方式是:跳转地址 = 下一条指令的起始地址 + (第3个操作数 << 2),其中第 3 个操作数为指令的低 16 比特。
例如下面这段汇编指令:
.text:00400700 07 00 44 10 beq $v0, $a0, locret_400720
.text:00400704 42 00 1C 3C lui $gp, 0x42 # 'B'
...
.text:00400720 locret_400720:
第 3 个操作数为 0x00404410 & 0xFFFF 而下一条指令起始地址为 0x00400704 ,因此如果满足 $v0 = $a0,则跳转地址为 0x00400704 + (0x00404410 & 0xFFFF) = 0x00400720 。
条件跳转指令有如下几种:
- BEQ(Branch on equal):如果前两个操作数相等则跳转,否则不跳转,语法为:
beq $s, $t, offset。 - BNE(Branch on not equal):与 BEQ 条件相反,语法为:
bne $s, $t, offset。 - BGEZ(Branch on greater than or equal to zero):两个操作数,如果第 1 个操作数大于等于 0 则跳转,否则不跳转,语法为:
bgez $s, offset。 - BGEZAL(Branch on greater than or equal to zero and link):在 BGEZ 指令的基础上将返回地址存放在 $ra 寄存器上,语法为:
bgezal $s, offset。 - BGTZ(Branch on greater than zero):大于 0 则跳转,否则不跳转,语法为:
bgtz $s, offset。 - BLEZ(Branch on less than or equal to zero):小于等于 0 则跳转,否则不跳转,语法为:
blez $s, offset。 - BLTZ(Branch on less than zero):小于 0 则跳转,语法为:
bltz $s, offset。 - BLTZAL(Branch on less than zero and link):在 BLTZ 指令的基础上将返回地址存放在 $ra 寄存器上,语法为:
bltzal $s, offset。
访存指令
MIPS 作为一种 load-store 架构,意味着当我们要访问内存必须要通过加载和存储指令才能访问。所有其他指令(add,sub,mul,div 等等)必须从寄存器获取其操作数并将其结果存储在寄存器中。也就是说除了专门读写内存的指令,其他指令的操作数只能是立即数或寄存器。
MIPS 的访存指令有 l(LOAD)和 s(STORE)两类,二者的数据流向分别是寄存器到内存和内存到寄存器。访存指令后面会跟一个后缀描述存取的数据长度,例如 b(Byte),w(Word)。
以 lb(Load byte)指令为例,语法为 lb $t, offset($s),表示的是读取内存中地址为 $s + offset 的 1 字节数据到 $t 寄存中。
除了访存外,l 指令还有其他用法,比如 LUI(Load upper immediate),语法为 lui $t, imm ,效果是 $t = imm << 16 。
其他指令
- 访问特殊寄存器
- MFHI(Move from HI):读取 HI 寄存器的值存放到操作数指定的寄存器中,语法为
mfhi $d。 - MFLO(Move from LO):读取 LO 寄存器的值存放到操作数指定的寄存器中,语法为
mflo $d。
- MFHI(Move from HI):读取 HI 寄存器的值存放到操作数指定的寄存器中,语法为
- 系统调用:SYSCALL
- 调用号放在 $v0 中,参数存放在 $a0~$a3 中。
- 系统调的返回值通常放在 $v0 中,如果系统调用出错,则会在 $a3 中返回一个错误号。
- 空指令:NOOP
指令特点
- 固定 4 字节指令长度
- 内存中的数据访问(load/store)必须严格对齐(至少 4 字节对齐)
- MIPS默认把子函数的返回地址保存在 $ra 中
- 流水线效应(分支延迟效应)
在执行第 2 行的跳转分支时,第 3 行的 move 指令已经执行完了。故 strchr 函数参数 $a0 来自于第 3 行的 $s0,而不是第 1 行的 $s2 。mov $a0, $s2 jalr strchr mov $a0, $s0 - MIPS 架构缓存问题
MIPS CPUs有两个独立的cache: 指令cache和数据cache。指令和数据分别在两个不同的缓存中。当缓存满了,会触发flush,将数据写回到主内存。攻击者的攻击payload通会被应用当做数据来处理,存储在数据缓存中。当payload触发漏洞,劫持程序执行流程的时候,会去执行内存中的shellcode。如果数据缓存没有触发flush的话,shellcode依旧存储在缓存中,而没有写入主内存。这会导致程序执行了本该存储shellcode的地址处随机的代码,导致不可预知的后果。
最简单可靠的让缓存数据写入内存的方式是调用一个阻塞函数。比如sleep(1)或者其他类似的函数。sleep的过程中,处理器会切换上下文让给其他正在执行的程序,缓存会自动执行flush。
调用约定
在函数开头先开辟栈帧然后保存 $fp 和 $ra ,ida 在分析栈的时候按照保存上一个 $fp 的位置为基址进行分析。
.text:004008F4 addiu $sp, -0x40
.text:004008F8 sw $ra, 0x38+ret_addr($sp)
.text:004008FC sw $fp, 0x38+last_fp($sp)
.text:00400900 move $fp, $sp
在函数结束的时候恢复 $fp 和 $ra 然后跳转至 $ra 返回。
.text:004009E8 move $sp, $fp
.text:004009EC lw $ra, 0x38+ret_addr($sp)
.text:004009F0 lw $fp, 0x38+last_fp($sp)
.text:004009F4 addiu $sp, 0x40
.text:004009F8 jr $ra
由于 MIPS 没有 call 指令,也就是说无法根据内存中存储的函数地址跳转到函数上,而是需要将内存中存储的函数地址 lw 到寄存器中,然后再通过寄存器跳转到函数上。这一点与 plt 中的功能极为相似,因此 mips 架构的程序是直接从 got 表中取函数地址然后跳转到函数执行的,如果开启了延迟绑定且函数对应 got 表未修复则会跳转至 plt 表来完成修复 got 表和调用函数的工作。

)



)



)
)
)
函数详解和示例)


以及分布式的概念)

)

