🌞欢迎来到深度学习的世界
🌈博客主页:卿云阁💌欢迎关注🎉点赞👍收藏⭐️留言📝
🌟本文由卿云阁原创!
🙏作者水平很有限,如果发现错误,请留言轰炸哦!万分感谢!
1. 深度图
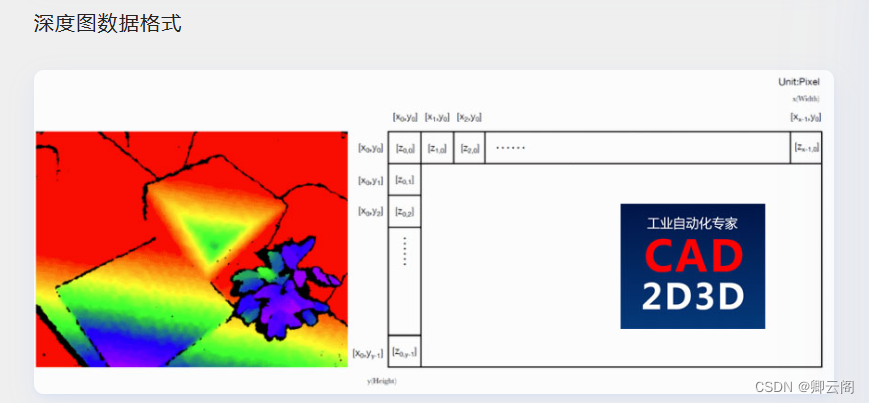
深度图中的单个像素值是空间中物体的某个点到垂直于左红外镜头光轴并通过镜头光心(深度相机光学零点)平面的垂直距离。
深度图是深度相机视野内所有点的深度数据构成的矩阵。深度图是一个16bit位深的单通道矩阵,单位为毫米。没有深度信息的点值为0。为直观的体现不同距离数值,在SDK提供的sample程序中,输出的深度图均被映射到了RGB色彩空间,所以显示出来的结果为RGB三通道8bit位深的位图,深度数据无外参,无畸变,只能提供用于转换点云数据的内参。
2.点云图
通过深度相机得到的物体外观表面的点数据集合是点云。使用深度相机得到的点云信息为三维坐标(X,Y,Z)。点云图是深度相机捕捉到的所有点的点云信息构成的数据矩阵。每点为3个float类型x,y,z值。没有三维空间信息的点为(0,0,0)。
点云图数据格式。
3. IR图
IR图像为红外图像传感器输出的红外图像。在输出深度图的时候,部分型号的相机输出的IR图像是被系统处理过的图像,如果需要看原始的IR图像,需要关闭深度图像输出。关闭深度图像输出后,激光投射器也会自动关闭。如果需要打开激光器,需主动调用SDK API关闭激光器的自动控制功能,并且设置激光机强度,才能看到正常的红外图像传感器图像。IR图像分为左IR图和右IR图,二者均包含内参和畸变参数,但是因为左IR和深度图是同一个空间坐标系,所以左IR图像无外参。
4. RGB图像
不同型号的Percipio相机会输出不同数据类型的RGB图像。其中一类RGB图像传感器含有硬件ISP模块,输出机为正常的YUV422/JPG图像,经OPENCV处理即可显示为RGB图像。另一类RGB图像传感器没有硬件ISP模块,输出的raw bayer图像数据显示为图像时,画面颜色”偏绿”,经过SDK的软件ISP处理(如白平衡),才可以显示为正常色彩空间的RGB图像; 没有硬件ISP模块的RGB图像传感器可以确保输出的图像数据与IR图像数据同步。RGB图像传感器组件提供了内参,外参数,畸变参数。
3D视觉专用名词概念解释,深度图、点云图、IR图、RGB图像

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.mzph.cn/news/633989.shtml
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章

【PyTorch】PyTorch之Tensors属性篇
文章目录 前言一、Tensors1、is_tensor2、is_storage3、is_complex4、is_conj5、is_floating_point6、is_nonzero7、set_default_dtype8、get_default_dtype9、set_default_device10、set_default_tensor_type11、torch.numel12、set_printoptions13、set_flush_denormal 前言 …

JAVA电商平台 免 费 搭 建 B2B2C商城系统 多用户商城系统 直播带货 新零售商城 o2o商城 电子商务 拼团商城 分销商城
涉及平台 平台管理、商家端(PC端、手机端)、买家平台(H5/公众号、小程序、APP端(IOS/Android)、微服务平台(业务服务) 2. 核心架构 Spring Cloud、Spring Boot、Mybatis、Redis …

Debian系统写Mysql时中文出现乱码无法定入的问题解决方案
原因是操作系统可能精简安装,没有GBK字符集,只有UTF8在转换或使用的时候有问题。
使用locale -a查看系统支持的字符集。正常的比较全的字符集的操作系统如下: 有问题的操作系统字符集如下:
解决方案:
步骤1&#…
ros实现将智能小车数据通过TCP/IP发送到上位机网关)
智能小车(八)ros实现将智能小车数据通过TCP/IP发送到上位机网关
ros实现将智能小车数据通过TCP/IP发送到上位机网关 这里主要注意: 将浮点型数据*1000转换成int型数据然后分字节储存(另取一个字节作为符号位)。没有用struct.pack进行字节流打包,原因是不同平台,字节流的打包浮点型数据不一样&am…
第830题较大分组的位置(Python))
力扣(leetcode)第830题较大分组的位置(Python)
830.较大分组的位置
题目链接:830.较大分组的位置
在一个由小写字母构成的字符串 s 中,包含由一些连续的相同字符所构成的分组。
例如,在字符串 s “abbxxxxzyy” 中,就含有 “a”, “bb”, “xxxx”, “z” 和 “yy” 这样的…

C++ //练习 2.11 指出下面的语句是声明还是定义:
C Primer(第5版) 练习 2.11
练习 2.11 指出下面的语句是声明还是定义:
( a ) extern int ix 1024;
( b ) int iy;
( c ) extern int iz;
环境:Linux Ubuntu(云服务器)
工具:vim 解释
( …

time-to-event数据的参考资料
目录 一、书籍推荐
二、方法论文章
Introductory/Overview Articles Censoring
Non-parametric survival methods Semi-parametric survival methods
Parametric survival methods
Time-Varying Covariates
Competing risk analysis
Analysis of clustered data and fra…

基于Java+SSM框架的智慧医疗问诊管理系统【附源码】
基于JavaSSM框架的智慧医疗问诊管理系统详细设计和实现【附源码】 🍅 作者主页 央顺技术团队 🍅 欢迎点赞 👍 收藏 ⭐留言 📝 🍅 文末获取源码联系方式 📝 🍅 查看下方微信号获取联系方式 承接各…

高效视频剪辑:视频合并让视频焕然一新,添加背景音乐更动听
随着社交媒体和数字内容的普及,视频剪辑已成为一项常用的技能。除了基本的剪辑技巧外,添加合适的背景音乐也是提升视频质量的方法。下面来看云炫AI智剪的高效视频剪辑技巧——如何批量合并视频,添加动听的背景音乐。
视频合并后的效果展示&a…

Interface 接口
/* * 语法1:使用interface关键字定义 * 语法2:接口中,允许定义“抽象方法”,public 和 abstract关键字可以省略 * 语法3:接口中,允许定义“默认方法” * 语法4:实现类通过implements关键字实现接…

What is `@Repository` does?
Repository 是Spring注解,标识数据访问层组件(DAO, Data Access Object) 当一个类被标记为 Repository 时: 1、组件扫描与自动代理: Spring通过组件扫描(Component Scan)机制发现带有 Reposit…

编程语言的比较—c语言,c++与java,c#的比较
c语言是历史悠久的语言,不仅可以开发应用程序,还可以用来编写操作系统。如果对接近硬件的部分进行操作,c语言是不二之选。
c语言是c语言中增加面向对象功能的编程语言。通常情况下,c可以编译c语言编写的代码。c广泛应用于微型计算…
)
【AI绘画+本地部署】基于krita的AI绘画(含windows一键整合包)
comfyuikrita所有相关资源整合包(无需下载后面链接)百度网盘:https://pan.baidu.com/s/1iwNRpdTaD26YbzSDm6WLDA?pwdbur8
–来自百度网盘超级会员V4的分享 krita绘画软件官网地址 https://krita.org/en/download/krita-desktop/ krita-ai-diffusion 插件ÿ…
)
数据库:园林题库软件(《城市绿地系统规划》答题卷四)
《城市绿地系统规划》答题卷四
填空题
1、生产绿地是指为城市绿化提供苗木、花草、种子的苗圃、草圃等圃地,是为城市绿化服务的生产、科研实验绿地。
园林苗圃的规模按照其用地面积来划分,可分为大型苗圃、中型苗圃、小型苗圃三类。
2、防护绿地是出…

P1451 求细胞数量——深搜、广搜
求细胞数量
题目描述
一矩形阵列由数字 0 0 0 到 9 9 9 组成,数字 1 1 1 到 9 9 9 代表细胞,细胞的定义为沿细胞数字上下左右若还是细胞数字则为同一细胞,求给定矩形阵列的细胞个数。
输入格式
第一行两个整数代表矩阵大小 n n n 和…

计算机网络-ACL访问控制列表
上一篇介绍NAT时候就看到了ACL这个东西了,这个是什么意思?有什么作用呢? 一、ACL访问控制列表 访问控制列表 (ACL, Access Control List)是由一系列permit或deny语句组成的、有序规则的列表。ACL是一个匹配工具,能够对报文进行匹配…

鸿蒙原生应用/元服务实战-AGC团队账户
多人及内外结合去开发运营鸿蒙原生应用元服务时,需要用到团队账户,AGC提供了强大的团队角色与权限分工能力。
团队帐号是开发者联盟为实名开发者提供的多个成员帐号登录与权限管理服务。当前团队帐号支持成员参与应用市场(付费推广、应用内付…
-设备树是什么?设备树基础概念及语法)
设备树(1)-设备树是什么?设备树基础概念及语法
1.简介
设备树:device tree DTS:设备树源码文件,采用树形结构描述板级信息,例如IIC、SPI等接口接了哪些设备 DTSI:设备树头文件,描述SOC级信息,例如几个CPU、主频多少、各个外设控制信息等 DTB…

