文章目录
- 一 、硬件介绍
- 二 、实验:LED闪烁、LED流水灯、蜂鸣器提示
- 2.1 需求1:面包板上的LED以1s为周期进行闪烁。亮0.5s,灭0.5s.....
- 2.2 需求2: 8个LED实现流水灯
- 三、硬件介绍-按键开关、光敏电阻
- 四、 实验 按键控制LED、光敏传感器控制蜂鸣器
- 4.1 需求1:一个按键开关控制一个LED,每次按下按键,LED就改变自己的亮灭状态;两套系统互不影响
- 4.2 需求2:光敏电阻被遮挡,蜂鸣器长鸣,光敏电阻不被遮挡,蜂鸣器不响。
核心:本文共4个小实验:
第一个:LED灯闪烁
第二个:LED流水灯
第三个:按键控制LED
第四个:光敏传感器控制蜂鸣器
一 、硬件介绍
1.1 LED、蜂鸣器、面包板
- LED:发光二极管,正向通电点亮,反向通电不亮。
- 有源蜂鸣器(本实验):内部自带振荡源,将正负极接上直流电压即可持续发声,频率固定。如下图所示的蜂鸣器模块使用三极管作为开关。
- 无源蜂鸣器:内部不带振荡源,需要控制器提供振荡脉冲才可发声,调整提供振荡脉冲的频率,可发出不同频率的声音(UP的51单片机课程中用晶振提供振荡源)。
注:LED长脚为正极,灯里面内部小头为正极。本实验的蜂鸣器低电平驱动。
最右边的半圆符号是蜂鸣器
1.2 硬件电路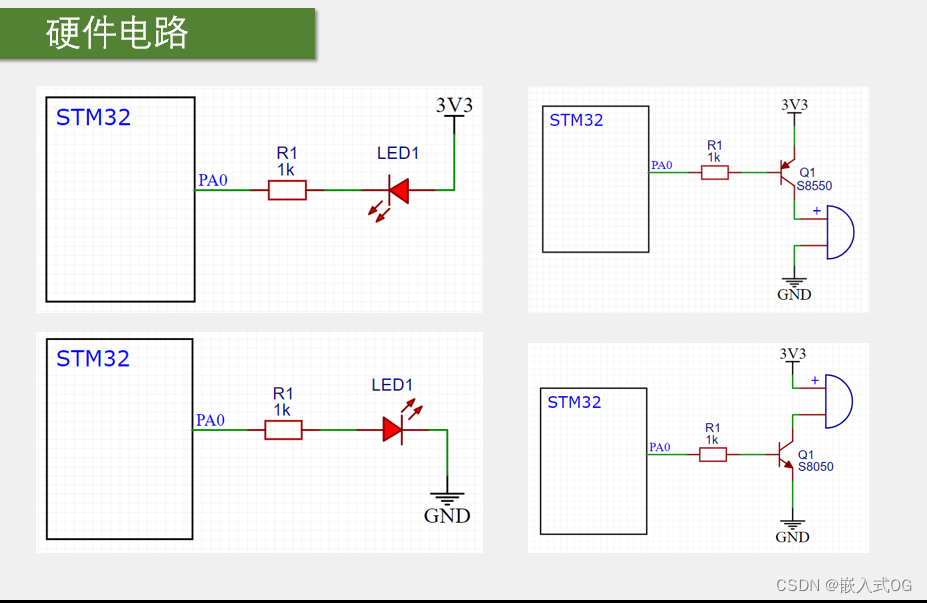
上图给出了led和蜂鸣器的驱动电路图。注意,三极管的发射极一定要直接接正电源/地,这是因为三极管的开启需要发射极和基极之间有一定的电压(电压差),如果接在负载侧则有可能会导致三极管无法正常开启。
三极管开关是最简单的驱动电路
这里的保护电阻(限流电阻)在UP视频中为了方便没有加,自己设计电路需要加上去。
很多单片机中或者芯片片,都使用了高电平弱驱动,低电平强驱动的规则。
1.3 三极管的简单介绍
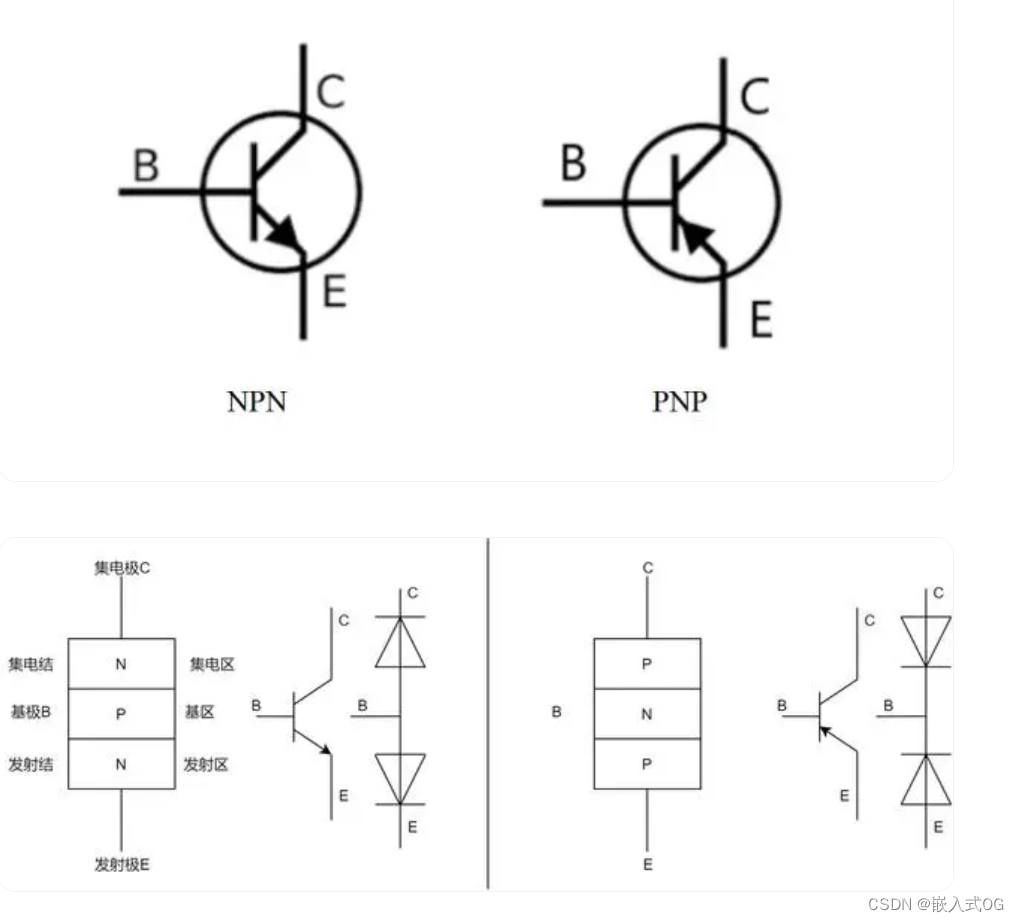
三极管(Transistor):
三极管是一种由三个半导体区域组成的电子元件,通常是NPN或PNP型。它具有三个引脚:发射极(Emitter)、基极(Base)和集电极(Collector)。三极管是一种可控电流放大器,可以根据输入信号的变化来控制输出电流。它可以作为开关或放大器使用。在放大器应用中,输入信号作用在基极上,通过控制基极电流,可以放大电流并将其输出到集电极。在开关应用中,基极电流的变化可以控制集电极与发射极之间的电流流动,实现开关功能。
1.4 面包板
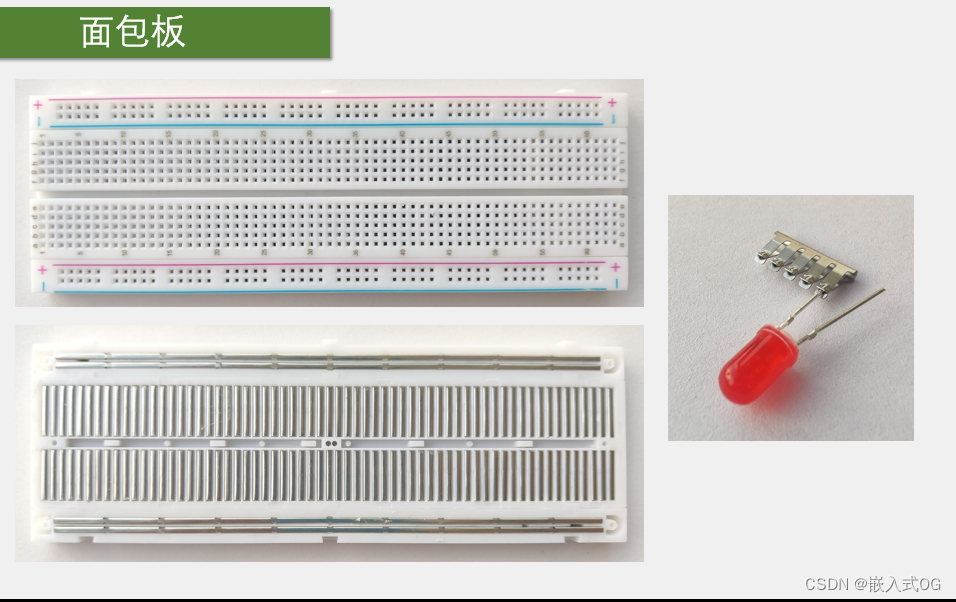 上图是面包板。可以看出,面包板中间的金属爪是竖着排列的,用于插各种元器件;最上和最下的两条金属爪是横着排列的,一般用于供电。注意,在使用面包板之前,一定要观察孔位的连接情况,比如接电源那里可能会有断开的情况,而且用杜邦线插拔可能会接触不到位的情况。
上图是面包板。可以看出,面包板中间的金属爪是竖着排列的,用于插各种元器件;最上和最下的两条金属爪是横着排列的,一般用于供电。注意,在使用面包板之前,一定要观察孔位的连接情况,比如接电源那里可能会有断开的情况,而且用杜邦线插拔可能会接触不到位的情况。
二 、实验:LED闪烁、LED流水灯、蜂鸣器提示
2.1 需求1:面包板上的LED以1s为周期进行闪烁。亮0.5s,灭0.5s…
- LED低电平驱动
低电平驱动(Low-Level Driving)是指在数字电路中,输出信号的电平为低电平(通常为低电压)时,能够正确地驱动连接的设备或元件。在数字电路中,通常将高电平定义为逻辑1,低电平定义为逻辑0。相当于低电平触发。
- 需要用到延时函数Delay.h、Delay.c ,在UP提供的“程序源码”中,为了方便管理,应在工程内建System文件夹,专门存放这些可以复用的代码。
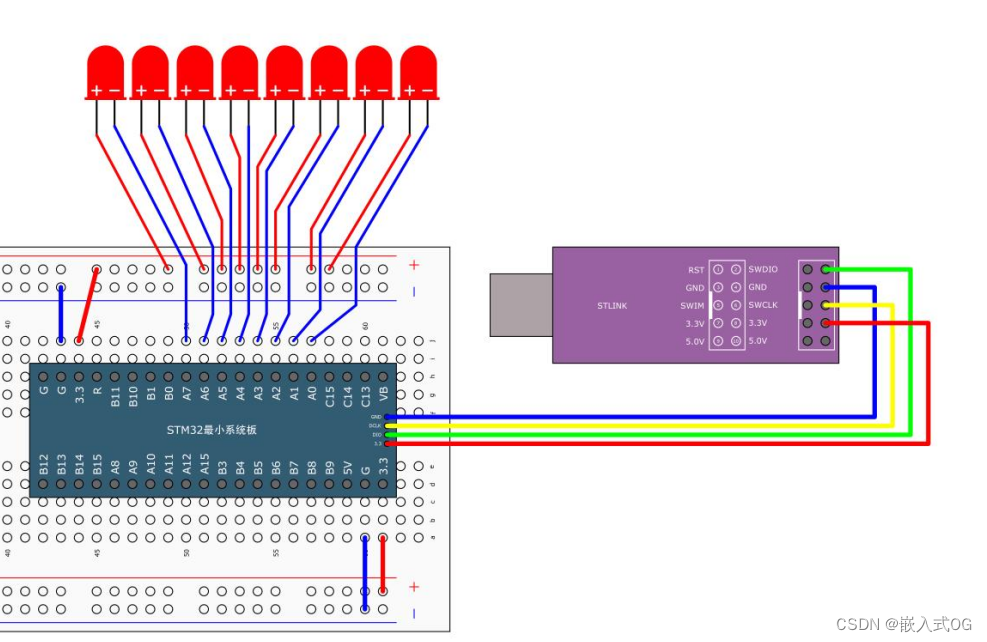
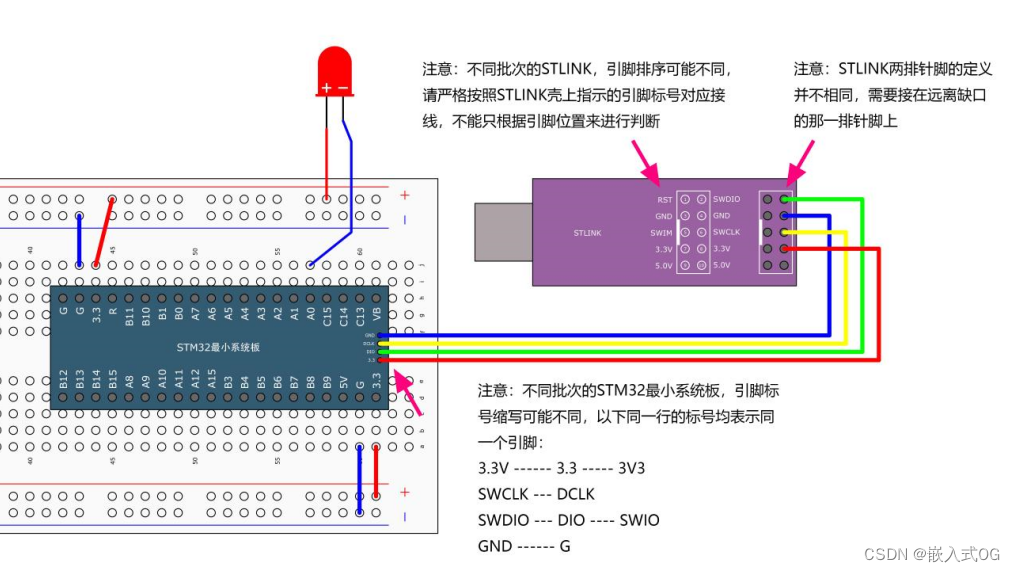 上图为LED闪烁接线图,实际上,应该在led和驱动电源之间接上保护电阻,但由于本电路过于简单,于是直接省略保护电阻。后面的"LED流水灯“、”蜂鸣器提示”实验同样省略保护电阻(我试过如果Vcc接5V甚至更大,如图的小发光二极管(容忍电压上限3v左右)会冒烟烧坏)
上图为LED闪烁接线图,实际上,应该在led和驱动电源之间接上保护电阻,但由于本电路过于简单,于是直接省略保护电阻。后面的"LED流水灯“、”蜂鸣器提示”实验同样省略保护电阻(我试过如果Vcc接5V甚至更大,如图的小发光二极管(容忍电压上限3v左右)会冒烟烧坏)
2.1 代码展示
选中函数名,按F12进入查看函数参数原型(部分注释没有改过来别搞乱了,关注点是红色框框)
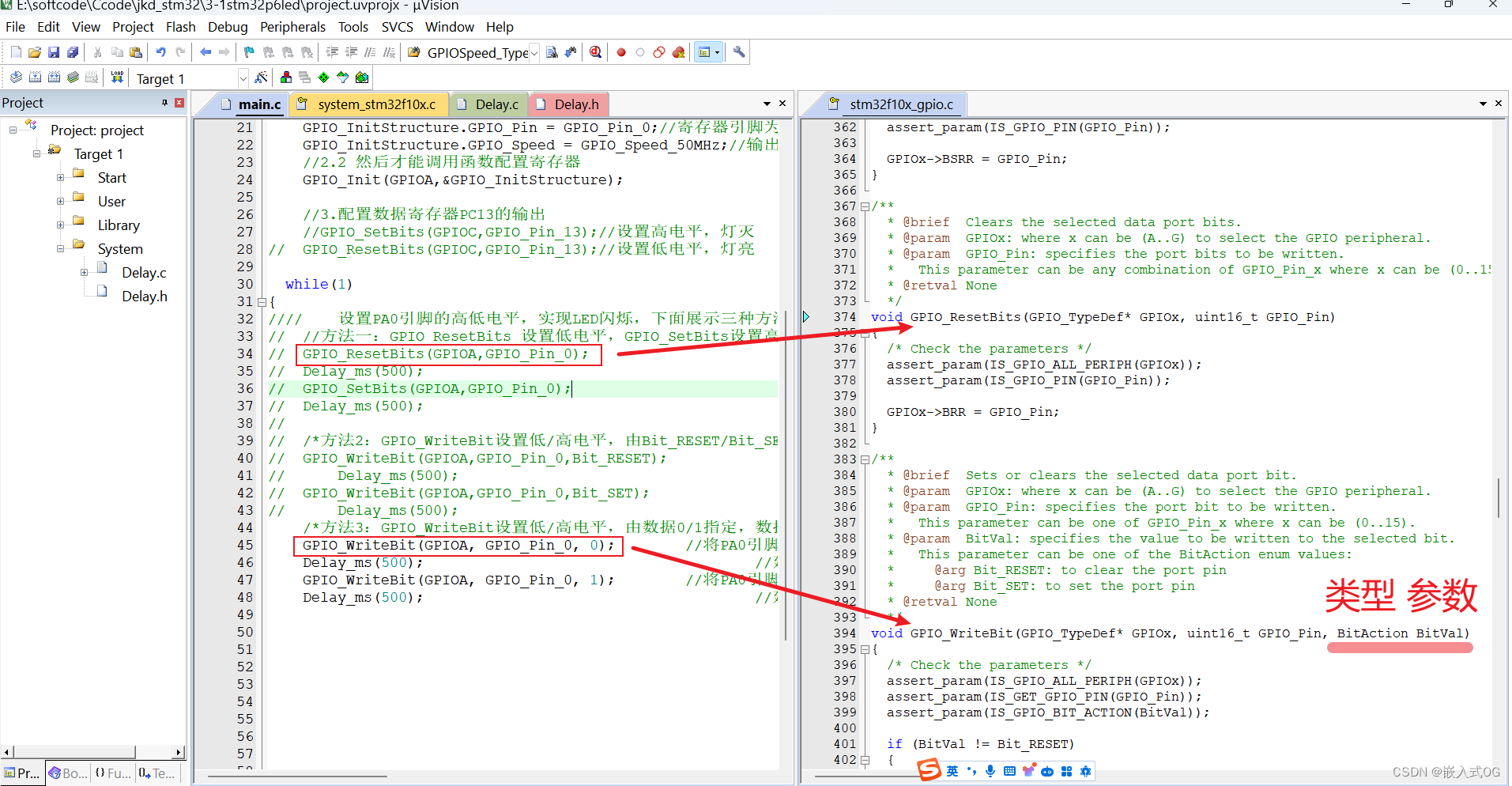
上图为除库函数之外的LED闪烁-代码调用
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"int main(void)
{/*开启时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟//使用各个外设前必须开启时钟,否则对外设的操作无效/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure; //定义结构体变量GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //GPIO模式,赋值为推挽输出模式GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //GPIO引脚,赋值为第0号引脚GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //GPIO速度,赋值为50MHzGPIO_Init(GPIOA, &GPIO_InitStructure); //将赋值后的构体变量传递给GPIO_Init函数//函数内部会自动根据结构体的参数配置相应寄存器//实现GPIOA的初始化/*主循环,循环体内的代码会一直循环执行*/while (1){/*设置PA0引脚的高低电平,实现LED闪烁,下面展示3种方法*//*方法1:GPIO_ResetBits设置低电平,GPIO_SetBits设置高电平*/GPIO_ResetBits(GPIOA, GPIO_Pin_0); //将PA0引脚设置为低电平Delay_ms(500); //延时500msGPIO_SetBits(GPIOA, GPIO_Pin_0); //将PA0引脚设置为高电平Delay_ms(500); //延时500ms/*方法2:GPIO_WriteBit设置低/高电平,由Bit_RESET/Bit_SET指定*/GPIO_WriteBit(GPIOA, GPIO_Pin_0, Bit_RESET); //将PA0引脚设置为低电平Delay_ms(500); //延时500msGPIO_WriteBit(GPIOA, GPIO_Pin_0, Bit_SET); //将PA0引脚设置为高电平Delay_ms(500); //延时500ms/*方法3:GPIO_WriteBit设置低/高电平,由数据0/1指定,数据需要强转为BitAction类型*/GPIO_WriteBit(GPIOA, GPIO_Pin_0, (BitAction)0); //将PA0引脚设置为低电平Delay_ms(500); //延时500msGPIO_WriteBit(GPIOA, GPIO_Pin_0, (BitAction)1); //将PA0引脚设置为高电平Delay_ms(500); //延时500ms}
}Delay.c
#include "stm32f10x.h"/*** @brief 微秒级延时* @param xus 延时时长,范围:0~233015* @retval 无*/
void Delay_us(uint32_t xus)
{SysTick->LOAD = 72 * xus; //设置定时器重装值SysTick->VAL = 0x00; //清空当前计数值SysTick->CTRL = 0x00000005; //设置时钟源为HCLK,启动定时器while(!(SysTick->CTRL & 0x00010000)); //等待计数到0SysTick->CTRL = 0x00000004; //关闭定时器
}/*** @brief 毫秒级延时* @param xms 延时时长,范围:0~4294967295* @retval 无*/
void Delay_ms(uint32_t xms)
{while(xms--){Delay_us(1000);}
}/*** @brief 秒级延时* @param xs 延时时长,范围:0~4294967295* @retval 无*/
void Delay_s(uint32_t xs)
{while(xs--){Delay_ms(1000);}
} Delay.h
#ifndef __DELAY_H //这是预处理指令,用来判断某个宏是否已经定义,如果该宏(没有)定义,则执行下面的代码
#define __DELAY_H //宏定义void Delay_us(uint32_t us);
void Delay_ms(uint32_t ms);
void Delay_s(uint32_t s);#endif当一个头文件(例如delay.h)被多个源文件引用时,可以使用预处理指令 #ifndef、#define 和 #endif 来确保头文件只被编译一次。
#ifndef 预处理指令:
#ifndef 是 “if not defined” 的简写。
#ifndef 用于检查某个宏是否未定义。如果该宏未定义,则执行下面的代码。
如果宏已经定义过了,#ifndef 中的代码将被忽略。
举例子说明:
#endif 是C/C++中的预处理指令,用于结束条件编译块。
当在代码中使用
#ifdef、#ifndef或#if这些条件编译指令时,需要使用#endif
来标记条件编译块的结束位置。例如,以下是一个简单的条件编译示例:
#ifdef DEBUG_MODE// 调试模式下执行的代码printf("Debug mode is enabled.\n"); #else// 正常模式下执行的代码printf("Debug mode is disabled.\n"); #endif 在这个示例中, #ifdef DEBUG_MODE 判断是否定义了 DEBUG_MODE 宏。如果定义了该宏,则执行调试模式下的代码;否则,执行正常模式下的代码。最后的 #endif 指令用于标记条件编译块的结束位置。它表示上面的条件编译块已经结束,之后的代码将会被正常编译。总结来说, #endif 用于结束条件编译块,它与 #ifdef 、 #ifndef 或 #if 一起使用,确保条件编译的范围正确闭合。
注意:此后Delay.h、Delay.c 将作为常用处理函数长期存放于System文件夹中,后续如果使用到将直接调用,故后续不会再在笔记中展示源代码。
编程感想:
- Keil编译过后,整个工程会比较大,不利于分享给别人。可以使用UP主提供的批处理程序,删掉工程中的中间文件后再分享给别人,其他人使用的时候只需要重新编译一下就行。
- 本教程用到了RCC和GPIO两个外设,这些外设的库函数在Library中,一般存放在相应的.h文件的最后。
- 将LED的短脚接负极,长脚接PA0口,就是高电平驱动方式,但是现象和低电平相同。
- 将GPIO设置成开漏输出模式,可以发现高电平(高阻态)无驱动能力,低电平有驱动能力。
5.记得添加文件夹的路径
2.2 需求2: 8个LED实现流水灯
面包板上的8个LED以0.5s切换一个的速度,实现流水灯。低电平驱动。
 上图为LED流水灯-接线图
上图为LED流水灯-接线图
代码调用关系与“2-1的LED闪烁实验”相同,下面是代码展示:
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"int main(void){
// //配置RCC寄存器,使能GPIOC的时钟。GPIO都属于APB2外设
// RCC->APB2ENR = 0x00000010;
// //配置寄存器PC13:通用推挽输出模式、输出模式50MHz
// GPIOC->CRH = 0x00300000;
// //输出数据寄存器PC13:
// //GPIOC->ODR = 0x00002000;//LED灭
// GPIOC->ODR = 0x00000000;//LED亮//1.开启GPIO的外设时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//2.配置寄存器PC13的端口模式//2.1 首先配置GPIO结构体GPIO_InitTypeDef GPIO_InitStructure ;//给结构体起名字GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//寄存器模式为通用推挽输出GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7;//寄存器引脚为13GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//输出速度为50MHz//2.2 然后才能调用函数配置寄存器GPIO_Init(GPIOA,&GPIO_InitStructure);//3.配置数据寄存器PC13的输出//GPIO_SetBits(GPIOC,GPIO_Pin_13);//设置高电平,灯灭
// GPIO_ResetBits(GPIOC,GPIO_Pin_13);//设置低电平,灯亮while(1)
{//使用GPIO_SetBits、GPIO_ResetBits进行赋值,这里仅用于演示“或操作”同时赋值GPIO_SetBits(GPIOA,GPIO_Pin_0 | GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7);GPIO_ResetBits(GPIOA,GPIO_Pin_0 | GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7);//使用GPIO_Write,同时设置GPIOA所有引脚的高低电平,实现LED流水灯//对指定的端口同时赋值GPIO_Write(GPIOA,~0x01);Delay_ms(500);GPIO_Write(GPIOA,~0x02);Delay_ms(500);GPIO_Write(GPIOA,~0x04);Delay_ms(500);GPIO_Write(GPIOA,~0x08);Delay_ms(500);GPIO_Write(GPIOA,~0x010);Delay_ms(500);GPIO_Write(GPIOA, ~0x20);Delay_ms(500);GPIO_Write(GPIOA, ~0x40);Delay_ms(500);GPIO_Write(GPIOA, ~0x80);//对应的二进制数 1000 0000,表示最高位的引脚
}
}思路:使用或操作 | 就可以实现只初始化定义某几个GPIO,或者某几个外设的时钟
2.3 需求3:蜂鸣器不断地发出滴滴、滴滴…的提示音。蜂鸣器低电平触发。
注:蜂鸣器执行四个动作为1个周期,分别是响0.1s,静音0.1s,响0.1s,静音0.1s。
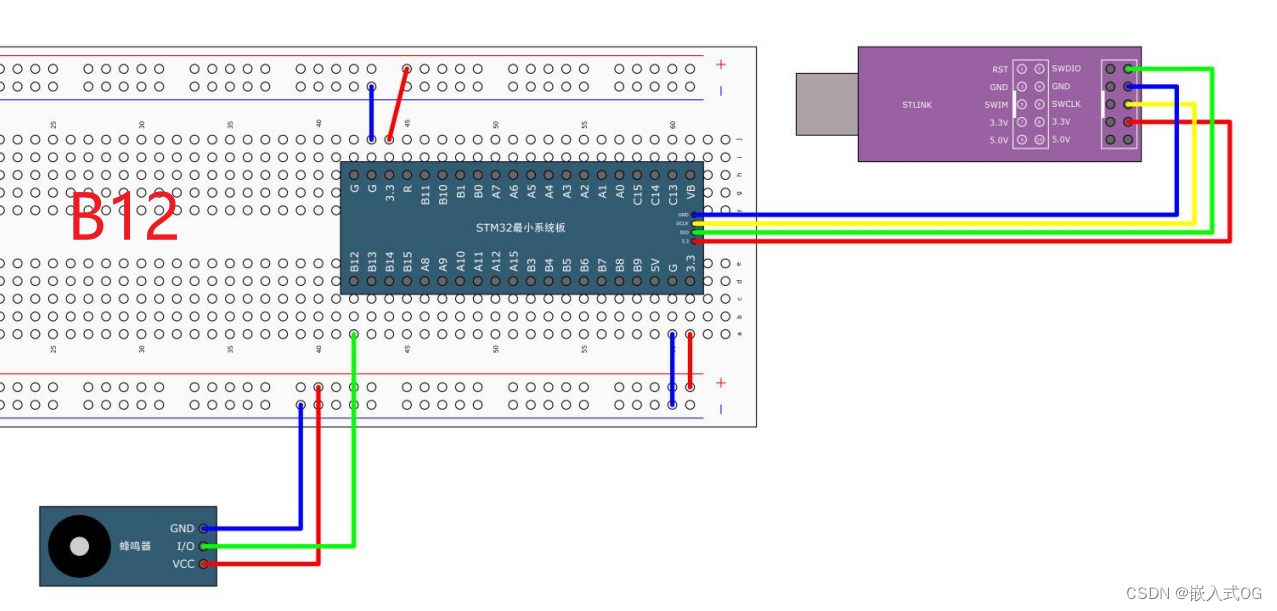
上图是蜂鸣器提示-接线图(GPIOB,Pin_12)
代码调用关系与“LED闪烁”实验相同,下面是代码展示:
mian.c
#include "stm32f10x.h" // Device header
#include "Delay.h"int main(void){// 开启APB2-GPIOB的外设时钟RCCRCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);// 初始化PB12端口:定义结构体及参数GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_Init(GPIOB, &GPIO_InitStructure);while(1){GPIO_ResetBits(GPIOB, GPIO_Pin_12);Delay_ms(100);GPIO_SetBits(GPIOB, GPIO_Pin_12);Delay_ms(100);GPIO_ResetBits(GPIOB, GPIO_Pin_12);Delay_ms(100);GPIO_SetBits(GPIOB, GPIO_Pin_12);Delay_ms(100);Delay_ms(600);};
}编程感想:
1.控制蜂鸣器的IO端口可以随便选,但是不要选择三个JTAG调试端口:PA15、PB3、PB4。本实验选择PB12端口进行输出。
2.关于调用库函数,有以下几种方法:
- 直接查看每一个外设的.h函数,拖到最后就可以看到本外设的所有库函数,然后在对应的.c文件中查看函数定义和调用方式即可。
- 查看库函数的用户手册-“stm32f103xx固件函数库用户手册.pdf”,这个中文版比较老;新版本的用户手册可以在st公司的帮助文档中查看,但只有英文版。
- CSDN百度别人的代码。
三、硬件介绍-按键开关、光敏电阻
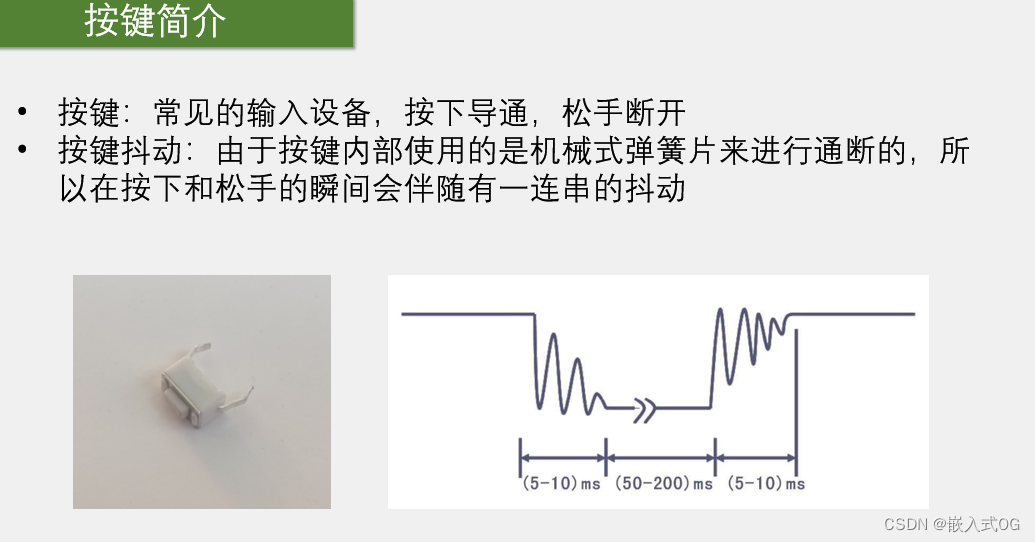 上图是按键开关实物图,虽然前面说过,GPIO端口有专门的肖特基触发器对输入信号进行整型,但按键开关的抖动幅度大、时间长,所以还需要“软件消抖”。基本思路就是延迟5-10ms,跳过抖动时间范围即可。
上图是按键开关实物图,虽然前面说过,GPIO端口有专门的肖特基触发器对输入信号进行整型,但按键开关的抖动幅度大、时间长,所以还需要“软件消抖”。基本思路就是延迟5-10ms,跳过抖动时间范围即可。
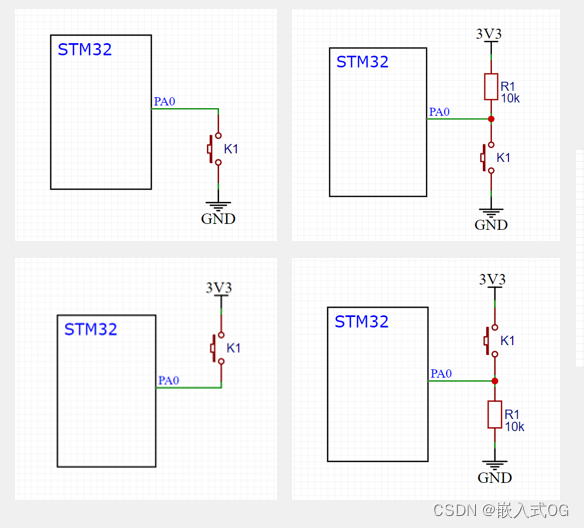 上图是按键开关硬件电路,上图给出了按键开关的硬件电路设计图。对于按键开关来说,常见以上四种设计方法,而行业规范中,单片机端口一般都有上拉输入模式(弱上拉),所以基本上就选择内部上拉/外部上拉的设计电路。
上图是按键开关硬件电路,上图给出了按键开关的硬件电路设计图。对于按键开关来说,常见以上四种设计方法,而行业规范中,单片机端口一般都有上拉输入模式(弱上拉),所以基本上就选择内部上拉/外部上拉的设计电路。
- 如果电路同时存在内部上拉和外部上拉,那么其高电平的驱动能力更强,但是低电平会更加耗电。两个下拉电路则可以使低电平驱动能力更强,而不会明显增加损耗。
- 浮空输入模式下,每部没有上下拉,此时必须在外部有上下拉电路。
- 注意内部和外部的上下拉必须一致,内部有上下拉时,就可以不用配置外部上下拉。

上图是传感器模块实物图,从左到右依次是:光敏电阻传感器、热敏电阻传感器、对射式红外传感器、反射式红外传感器。传感器(光敏电阻/热敏电阻/红外接收管等)的电阻会随外界模拟量的变化而变化,通过与定值电阻分压可得到模拟电压输出,再通过电压比较器进行二值化即可得到数字电压输出。
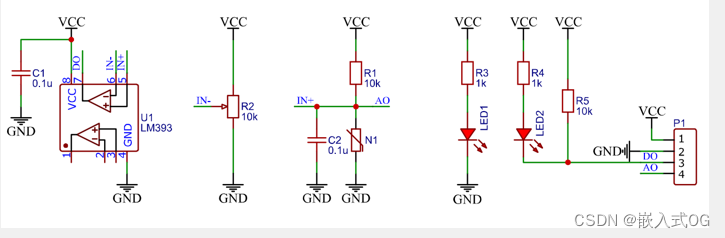 上图是传感器模块原理图:
上图是传感器模块原理图:
上述所给出的是一个比较通用的传感器模块格式
- 左起第三个模块:下面的可变电阻就是各种传感器模块所对应的阻值,与上面的分压电压R1进行,进而输出模拟电压值A0。电容C2是滤波电容。
- 左边起第一个模块:使用LM393模块,通过运算放大器实现“电压比较器”的功能。IN-是一个可以调节的值,IN+则直接连接传感器的模拟分压AO,当AO>IN-时,数字输出DO拉高;当AO<IN-时,数字输出DO拉低。
- 左边起第二个模块:通过一个滑变电阻器实现比较电压IN-的调整。
- 左边起第四个模块:电源指示灯。
- 左边起第五个模块:传感器模块的端口。LED2用于指示数字输出DO的值。注意R5上拉电阻保证DO的默认值为高。
补充情况:
1.对于对射式红外传感器来说,N1就是红外接收管,并且额外还有一个点亮红外发射管的电路,模拟电压表示时接收红外信号的强度。并且该模块常用于检测通断,所以用两个电阻将阈值固定为1/2的参考电压,而不是采用滑动变阻器。
2.对于反射式红外式传感器,向下发射和接收红外光,可以做循迹小车。
而对于传感器模块的电路设计来说,由于采用模块的方案,所以直接给传感器接上VCC和GND,将模拟信号AO和数字信号DO接在stm32的对应端口上即可。
本次实验采用数字信号DO接入,关于模拟信号接入的使用方法在后面AD/DA的实验中继续讲解。
四、 实验 按键控制LED、光敏传感器控制蜂鸣器
4.1 需求1:一个按键开关控制一个LED,每次按下按键,LED就改变自己的亮灭状态;两套系统互不影响
- LED低电平驱动。
- 按键B11控制LEDA2,按键B1控制LEDA1.
- LED的状态改变是“松开触发”。
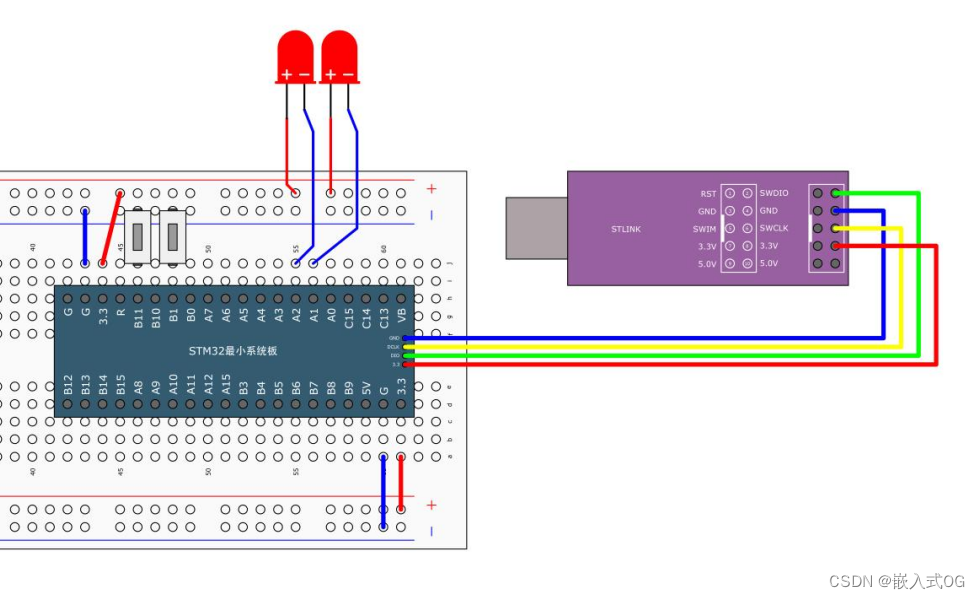
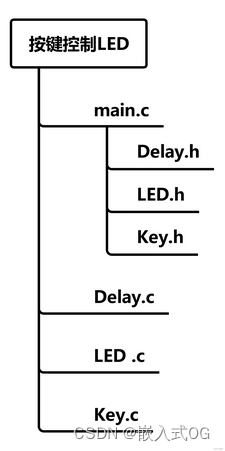
上图分别依次是按键控制LED-接线图和代码调用(不包括库函数)
以下是代码展示
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "LED.h"
#include "Key.h"uint8_t KeyNum; //定义用于接收按键键码的变量int main(void)
{/*模块初始化*/LED_Init(); //LED初始化Key_Init(); //按键初始化while (1){KeyNum = Key_GetNum(); //获取按键键码if (KeyNum == 1) //按键1按下{LED1_Turn(); //LED1翻转}if (KeyNum == 2) //按键2按下{LED2_Turn(); //LED2翻转}}
}LED.h
#ifndef __LED_H
#define __LED_Hvoid LED_Init(void);
void LED1_ON(void);
void LED1_OFF(void);
void LED1_Turn(void);
void LED2_ON(void);
void LED2_OFF(void);
void LED2_Turn(void);#endifKey.h
#ifndef __KEY_H
#define __KEY_Hvoid Key_Init(void);
uint8_t Key_GetNum(void);#endifLED.c
#include "stm32f10x.h" // Device header/*** 函 数:LED初始化,初始化PA2、PA1作为两个LED的输出端口* 参 数:无* 返 回 值:无*/
void LED_Init(void)
{/*开启时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟/*GPIO初始化*///初始化PA的输出端口:定义结构体及参数GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//推挽输出GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_2;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA1和PA2引脚初始化为推挽输出/*设置GPIO初始化后的默认电平,默认输出为低电平LED初始不亮*/GPIO_SetBits(GPIOA, GPIO_Pin_1 | GPIO_Pin_2); //设置PA1和PA2引脚为高电平
}/*** 函 数:LED1开启* 参 数:无* 返 回 值:无*/
void LED1_ON(void)
{GPIO_ResetBits(GPIOA, GPIO_Pin_1); //设置PA1引脚为低电平
}/*** 函 数:LED1关闭* 参 数:无* 返 回 值:无*/
void LED1_OFF(void)
{GPIO_SetBits(GPIOA, GPIO_Pin_1); //设置PA1引脚为高电平
}/*** 函 数:LED1状态翻转* 参 数:无* 返 回 值:无*/
void LED1_Turn(void)
{if (GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_1) == 0) //获取输出寄存器的状态,如果当前引脚输出低电平{GPIO_SetBits(GPIOA, GPIO_Pin_1); //则设置PA1引脚为高电平}else //否则,即当前引脚输出高电平{GPIO_ResetBits(GPIOA, GPIO_Pin_1); //则设置PA1引脚为低电平}
}/*** 函 数:LED2开启* 参 数:无* 返 回 值:无*/
void LED2_ON(void)
{GPIO_ResetBits(GPIOA, GPIO_Pin_2); //设置PA2引脚为低电平
}/*** 函 数:LED2关闭* 参 数:无* 返 回 值:无*/
void LED2_OFF(void)
{GPIO_SetBits(GPIOA, GPIO_Pin_2); //设置PA2引脚为高电平
}/*** 函 数:LED2状态翻转* 参 数:无* 返 回 值:无*/
void LED2_Turn(void)
{if (GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_2) == 0) //获取输出寄存器的状态,如果当前引脚输出低电平{ GPIO_SetBits(GPIOA, GPIO_Pin_2); //则设置PA2引脚为高电平} else //否则,即当前引脚输出高电平{ GPIO_ResetBits(GPIOA, GPIO_Pin_2); //则设置PA2引脚为低电平}
}Key.c
#include "stm32f10x.h" // Device header
#include "Delay.h"/*** 函 数:按键初始化,初始化B11、B1作为按键2、按键1* 参 数:无* 返 回 值:无*/
void Key_Init(void)
{/*开启时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB的时钟/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_11;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure); //将PB1和PB11引脚初始化为上拉输入
}/*** 函 数:按键获取键码* 参 数:无* 返 回 值:按下按键的键码值,范围:0~2,返回0代表没有按键按下* 注意事项:此函数是阻塞式操作,当按键按住不放时,函数会卡住,直到按键松手*/
uint8_t Key_GetNum(void)
{uint8_t KeyNum = 0; //定义变量,默认键码值为0if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0) //读PB1输入寄存器的状态,如果为0,则代表按键1按下{Delay_ms(20); //延时消抖while (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0); //等待按键松手Delay_ms(20); //延时消抖KeyNum = 1; //置键码为1}if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11) == 0) //读PB11输入寄存器的状态,如果为0,则代表按键2按下{Delay_ms(20); //延时消抖while (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11) == 0); //等待按键松手Delay_ms(20); //延时消抖KeyNum = 2; //置键码为2}return KeyNum; //返回键码值,如果没有按键按下,所有if都不成立,则键码为默认值0
}编程感想:
1 .代码提示框如果不弹出,可以使用CTRL+space 弹出代码提示框。如果没用的话,大概率是和中英切换快捷键冲突,输入法右键设置取消即可。
2.GPIO配置好之后默认就是低电平,所以配置好后LED会默认是亮的状态。
3.本工程创建了全新的驱动函数文件夹Hardware,专门用于存放程序中使用到的外设(如LED、按键、光敏传感器等)的驱动函数。做好驱动代码的提取是非常重要的,可以极大地方便梳理框架。
4.其实写完之后发现,这个按键开关非常不灵敏,经常出现按键松手后LED没有反应的情况,大概这就是设置“光敏传感器控制蜂鸣器”实验的原因吧
4.2 需求2:光敏电阻被遮挡,蜂鸣器长鸣,光敏电阻不被遮挡,蜂鸣器不响。
- 蜂鸣器低电平驱动。
- 光敏传感器,光强越强阻值越小,分压越小;DO的LED指示灯低电平驱动。

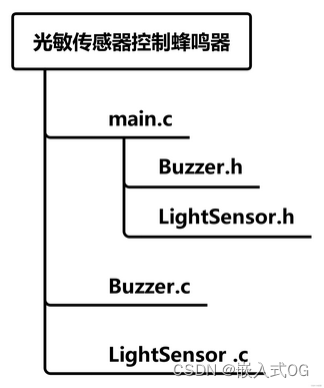
上图是光敏传感器控制蜂鸣器的接线图,下图是代码调用(不包括库函数)
 main.c
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "Buzzer.h"
#include "LightSensor.h"int main(void)
{/*模块初始化*/Buzzer_Init(); //蜂鸣器初始化LightSensor_Init(); //光敏传感器初始化while (1){if (LightSensor_Get() == 1) //如果当前光敏输出1{Buzzer_ON(); //蜂鸣器开启}else //否则{Buzzer_OFF(); //蜂鸣器关闭}}
}Buzzer.h
#ifndef __BUZZER_H
#define __BUZZER_Hvoid Buzzer_Init(void);
void Buzzer_ON(void);
void Buzzer_OFF(void);
void Buzzer_Turn(void);#endifBuzzer.c
#include "stm32f10x.h" // Device header/*** 函 数:蜂鸣器初始化* 参 数:无* 返 回 值:无*/
void Buzzer_Init(void)
{/*开启时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB的时钟/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure); //将PB12引脚初始化为推挽输出/*设置GPIO初始化后的默认电平*/GPIO_SetBits(GPIOB, GPIO_Pin_12); //设置PB12引脚为高电平
}/*** 函 数:蜂鸣器开启* 参 数:无* 返 回 值:无*/
void Buzzer_ON(void)
{GPIO_ResetBits(GPIOB, GPIO_Pin_12); //设置PB12引脚为低电平
}/*** 函 数:蜂鸣器关闭* 参 数:无* 返 回 值:无*/
void Buzzer_OFF(void)
{GPIO_SetBits(GPIOB, GPIO_Pin_12); //设置PB12引脚为高电平
}/*** 函 数:蜂鸣器状态翻转* 参 数:无* 返 回 值:无*/
void Buzzer_Turn(void)
{if (GPIO_ReadOutputDataBit(GPIOB, GPIO_Pin_12) == 0) //获取输出寄存器的状态,如果当前引脚输出低电平{GPIO_SetBits(GPIOB, GPIO_Pin_12); //则设置PB12引脚为高电平}else //否则,即当前引脚输出高电平{GPIO_ResetBits(GPIOB, GPIO_Pin_12); //则设置PB12引脚为低电平}
}LightSensor.h
#ifndef __LIGHT_SENSOR_H
#define __LIGHT_SENSOR_Hvoid LightSensor_Init(void);
uint8_t LightSensor_Get(void);#endifLightSensor.c
#include "stm32f10x.h" // Device header/*** 函 数:光敏传感器初始化* 参 数:无* 返 回 值:无*/
void LightSensor_Init(void)
{/*开启时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB的时钟/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure); //将PB13引脚初始化为上拉输入
}/*** 函 数:获取当前光敏传感器输出的高低电平* 参 数:无* 返 回 值:光敏传感器输出的高低电平,范围:0/1*/
uint8_t LightSensor_Get(void)
{return GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_13); //返回PB13输入寄存器的状态
}编程感想:
1.模块化编程香,每个模块都写一个专门的驱动函数存放在Hardware文件夹中,使得main.c函数极其简单,几乎就可以直接按照人类正常的功能逻辑书写代码
2.蜂鸣器是低电平驱动 光敏传感器,光强越强那阻值越小,分压越小;光敏电阻被阻挡,蜂鸣器长鸣。
3.获取光敏电阻返回的GPIO值初始值是1,当有光源时,变为0。

)

海豚与沙丁鱼全过程文档及程序)




![[Error]连接iPhone调试时提示Failed to prepare the device for development.](http://pic.xiahunao.cn/[Error]连接iPhone调试时提示Failed to prepare the device for development.)
)
: Flink Doris Connector - (1)-源码编译)








