计算原理
角度计算
-
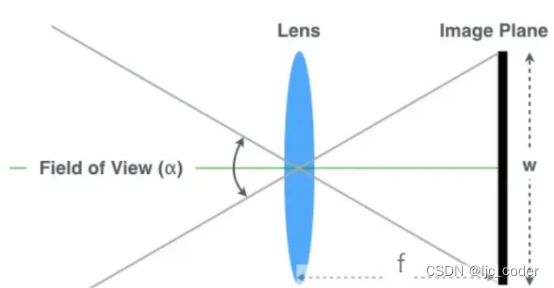
相机CCD大小固定,即相机成像平面大小固定,相机视场角(FOV)仅由相机焦距F决定;
- 因此,定焦相机的FOV大小固定,通过上图可以看出相机视场角的计算公式为:
FOV = 2*atan(w/2f) - 注意,这里w/2f代表的是w/2除以f;
-
因此,要想获取图像上任意点(x0,x0)到图像中心的旋转角度,只需求出任意点在成像画面中与图像中心(x1,x2)在x、y方向上的距离差作为新的w即可,但需注意x轴方向的差对应的是y轴的旋转角度,其余类似,如下式:
机械臂位姿计算
- 已知两个旋转角度,将其转化为旋转矩阵R_x、R_y;
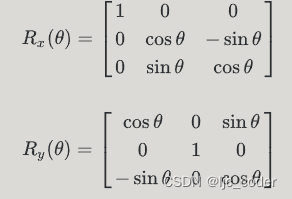
- 左乘机械臂当前位姿矩阵,即可获取机械臂到达中心点的机械臂位姿即:


)
![ElasticSearch扫盲概念篇[ES系列] - 第500篇](http://pic.xiahunao.cn/ElasticSearch扫盲概念篇[ES系列] - 第500篇)
)



)





)
)
)


