作者:小柠檬 | 来源:3DCV
在公众号「3DCV」后台,回复「原论文」可获取论文pdf
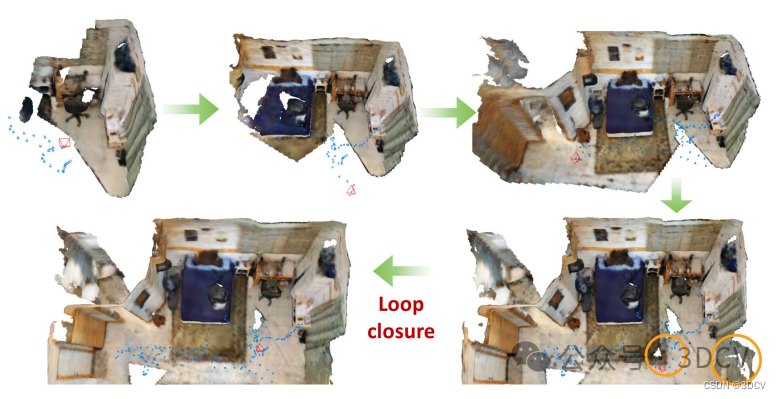
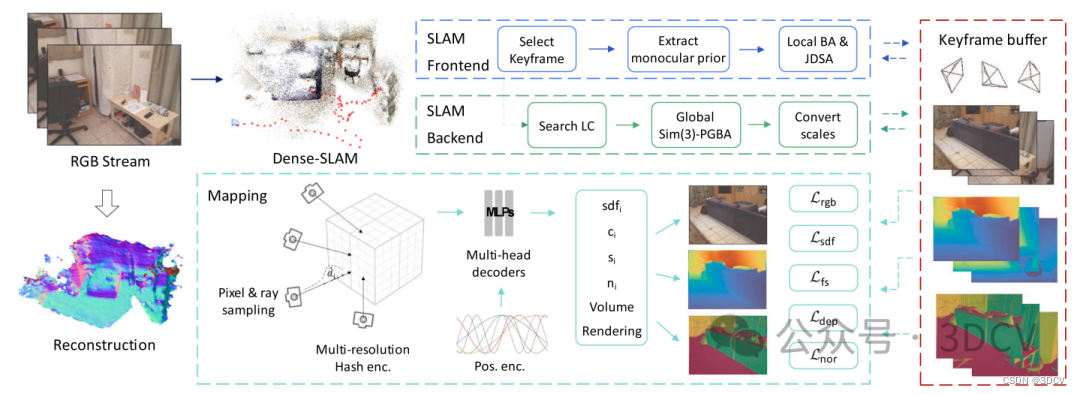
我们提出了一种新颖的方法,它将基于深度学习的密集SLAM与神经隐式场相结合,实时生成密集地图,而无需像以前的方法那样依赖RGB-D或姿势输入。我们的方法充分利用了深度学习的表征能力和神经隐式场的适应性,为实时单目密集SLAM提供了鲁棒、高效和准确的解决方案。
原文链接:慕尼黑工业大学最新提出!单目实时密集建图的混合隐式场方法
作者:小柠檬 | 来源:3DCV
在公众号「3DCV」后台,回复「原论文」可获取论文pdf
我们提出了一种新颖的方法,它将基于深度学习的密集SLAM与神经隐式场相结合,实时生成密集地图,而无需像以前的方法那样依赖RGB-D或姿势输入。我们的方法充分利用了深度学习的表征能力和神经隐式场的适应性,为实时单目密集SLAM提供了鲁棒、高效和准确的解决方案。
原文链接:慕尼黑工业大学最新提出!单目实时密集建图的混合隐式场方法
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.mzph.cn/news/620081.shtml
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!
)




:爬取B站番剧的简介)






)

)



