1 毫米波雷达已广泛应用于汽车 ADAS 系统
汽车智能驾驶需要感知层、决策层、执行层三大核心系统的高效配合,其中感知层通过传感器探知周围的环境。汽车智能驾驶感知层将真实世界的视觉、物理、事件等信息转变成数字信号,为车辆了解周边环境、制定驾驶操作提供基本保障,并为高级辅助驾驶系统的决策层提供准确、及时、充分的依据,进而由执行层对汽车安全行驶作出准确判断。目前市场上主流的汽车智能驾驶感知系统包括视觉感知、超声波感知、毫米波感知、激光感知等技术路线。
图 1 :多传感器融合的单车感知层
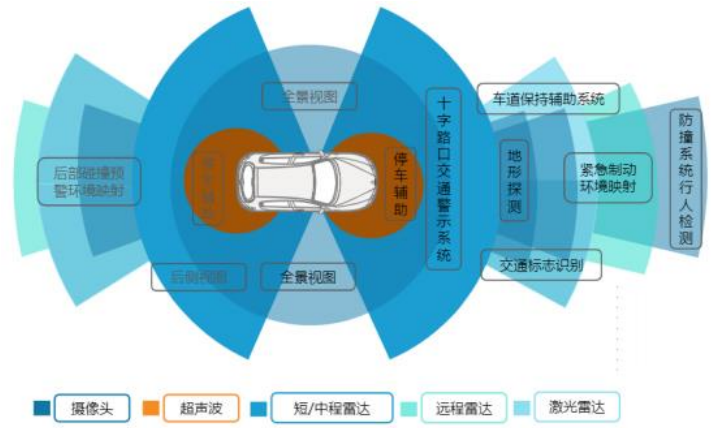
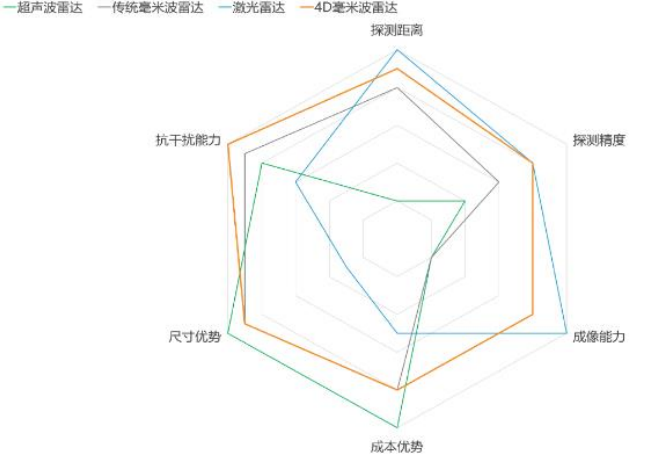
图 2 :多种汽车雷达性能对比图
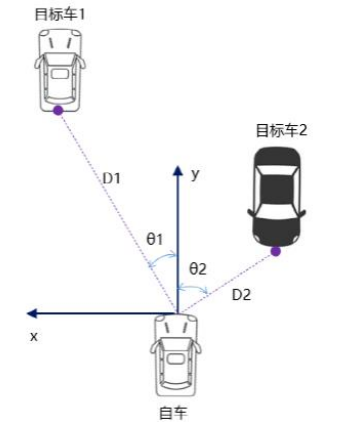
毫米波雷达是目前实现自动驾驶及 ADAS 功能常用的感知层硬件。毫米波雷达通过天线发射调频连续波(FMCW),利用反射回波与发射波的时间差可计算出目标距离。此外,毫米波雷达可也基于多普勒原理,通过发射与反射信号的频率差异可以精确测量目标相对于雷达的运动速度,进一步通过多目标检测与跟踪算法实现多目标分离与跟踪。
图 3 :多普勒效应示意图

图 4 :车载毫米波雷达工作原理
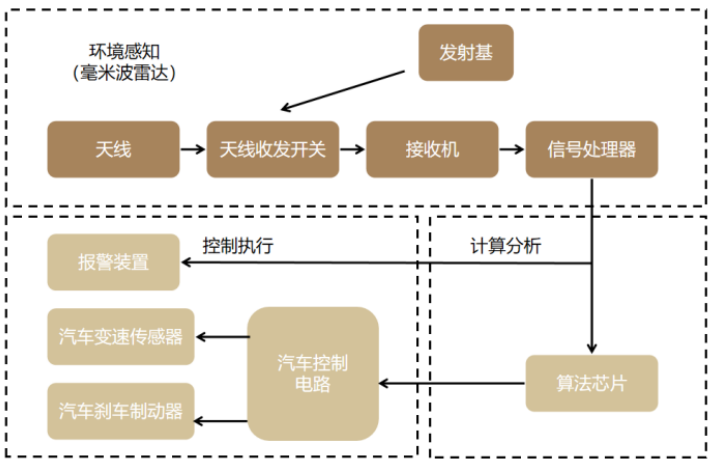
毫米波雷达在自动驾驶领域主要分为 3 个波段,分别是 24GHz 、 77GHz 和 79GHz 。 24GHz 探测距离有限,在自动驾驶系统中常用于感知车辆近处的障碍物,能够实现盲点补测、变道辅助等功能。 77GHz 最大检测距离可达 160 米以上,能够用于实现紧急制动、高速公路跟车等 ADAS 功能;同时也能满足自动驾驶领域,对障碍物距离、速度和角度的测量需求。 79GHz 通信频段在 76GHz-81GHz,探测距离中等但分辨率高。根据公式:光速 =波长×频率,频率越高波长越短,而波长越短有利于提高分辨率,因此 79GHz 的毫米波雷达有望成为未来的发展趋势。
表 1 :不同频率车载毫米波雷达对比

表 2 :不同探测距离车载毫米波雷达的 ADAS 功能

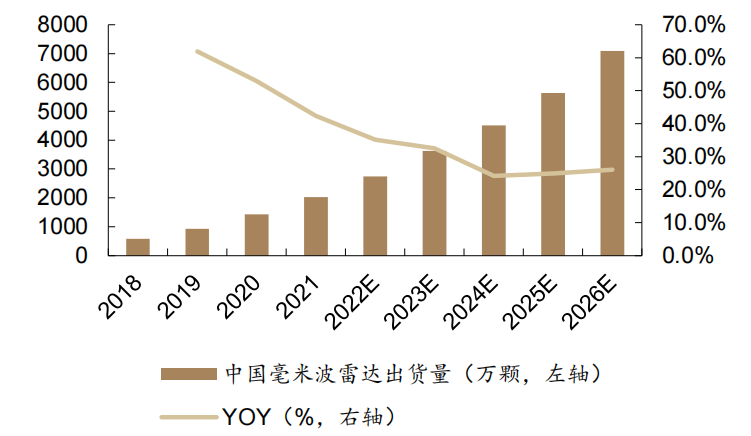
单车搭载毫米波雷达数量不断增多,带动整个毫米波雷达出货量高速增长。近年来,汽车智能化发展改革不断推进,毫米波雷达已广泛应用于汽车的 ADAS系统。根据智研咨询的数据, 2021 年我国毫米波雷达出货量已达 2000 万颗,同比增幅超 40% ,展望未来,毫米波雷达出货量将不断扩大, 2026 年出货量有望超 7000 万颗。市场规模方面,我国毫米波雷达市场规模由 2018 年的 31 亿元增加至 2021 年的 69 亿元,其中汽车领域市场规模为 56 亿元;预计 2026 年市场规
模将接近 200 亿元,其中汽车领域占比约为 77% 。
图 5 :部分车型配备毫米波雷达数量

图 6 :中国毫米波雷达出货量及预测
2 4D 毫米波成像雷达:颠覆性、创新性产品
3D 毫米波雷达存在缺陷。目前主流毫米波雷达主要功能为测角、测距与测速,故也称之为 3D 毫米波雷达。 3D 毫米波雷达固有的缺陷为无法测量物体高度,从而使其不能识别前方静止物体是否会对车辆通行产生影响。除此之外, 3D 毫米波雷达另一个缺陷是信噪比太低,存在大量误测。当视觉感知结果与 3D 毫米波雷达的结果发生冲突的时候,通常会屏蔽掉后者,这或是特斯拉 AutoPilot 出现多次事故的原因:一旦视觉感知结果有误,将对汽车驾驶安全产生严重威胁。 2021 年5 月,特斯拉宣布为北美市场制造的 Model 3 和 Model Y 将不配备毫米波雷达,Autopilot 将由摄像头系统提供运算支持。
图 7 :特斯拉与白色拖挂卡车相撞

图 8 : 3D 毫米波雷达成像示意图
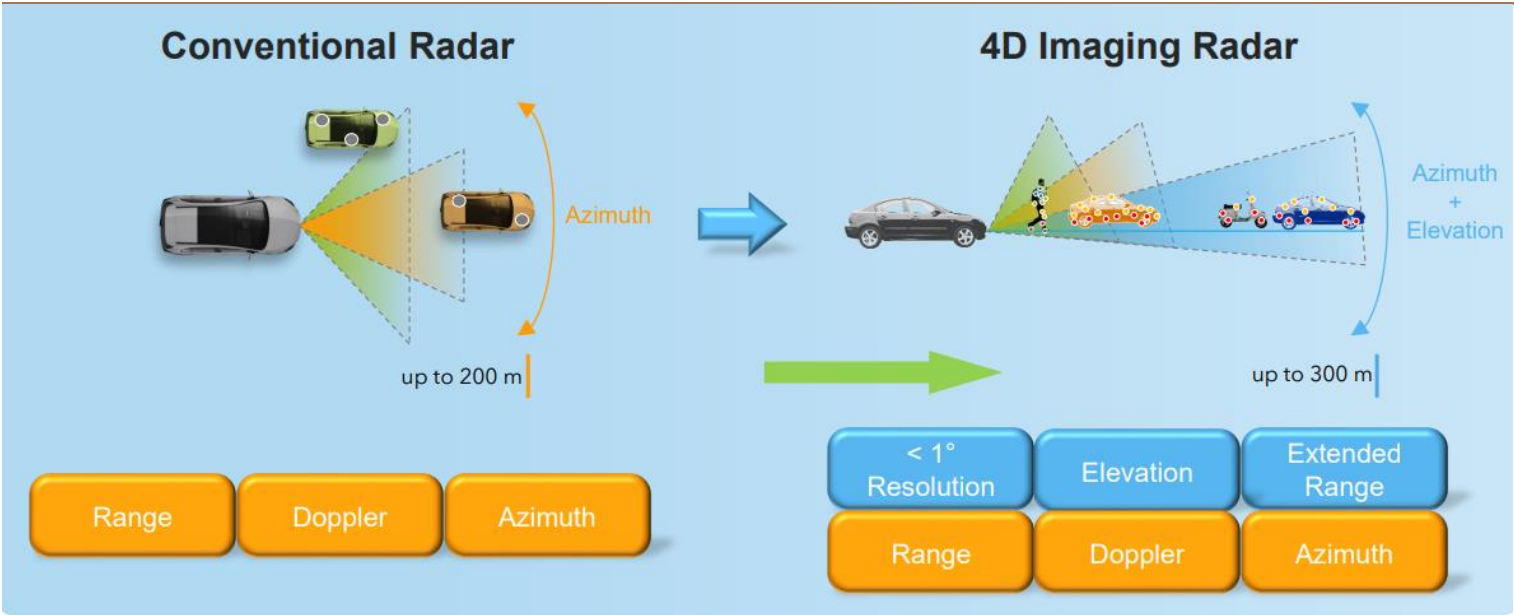
4D 毫米波成像雷达突破了传统毫米波雷达的局限性。 4D 毫米波成像雷达也称为 4D 成像雷达,与传统毫米波雷达相比, 4D 成像雷达增加了俯仰角的测量信息,并且角度分辨率可达到亚度( <1°)级别,能够通过输出大量的测量点清晰地呈现出目标障碍物的轮廓。 4D 成像雷达也能通过神经网络技术,根据呈现的点云图像信息,对道路的使用者和障碍物进行目标检测及分类,可在最远 300m 处检测、区分、追踪多个静止和移动的目标。此外, 4D 成像雷达在前前车刹车,防止连续追尾以及大光比、恶劣天气等 corner case 场景下能够保持较好的性能。
图 9 : 4D 毫米波雷达与传统毫米波雷达的对比
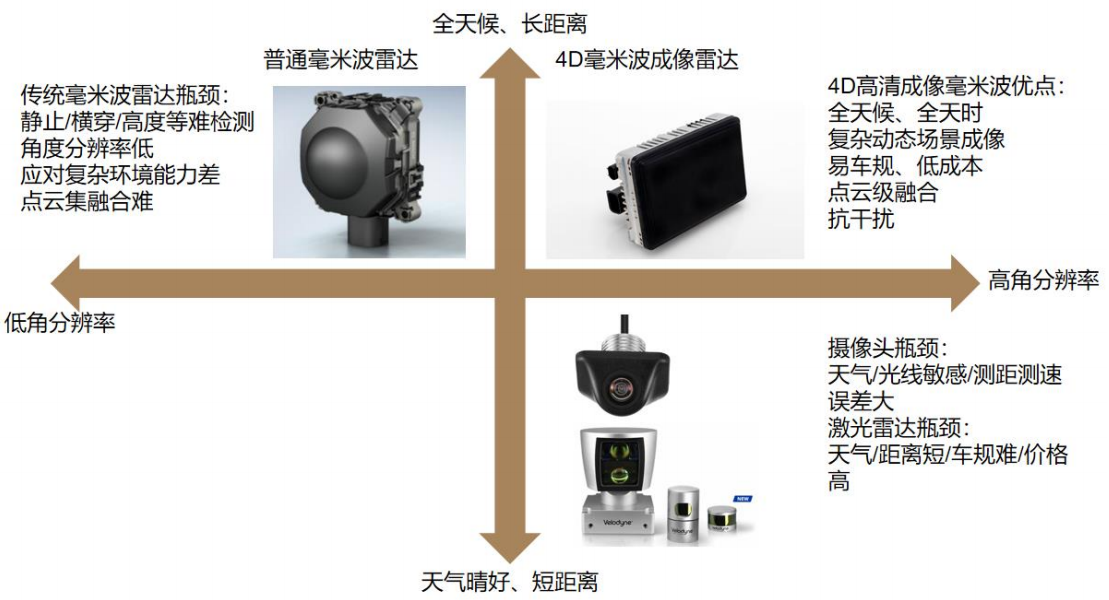
4D 成像雷达与激光雷达性能各有千秋。
在点云密度与质量方面,根据九章智驾披露的信息,4D 成像雷达可达到几万点云密度,性能相当于低线数激光雷达,无法与可达到几十万甚至百万点云密度的高线数激光雷达相提并论。
在角度分辨率方面,根据九章智驾披露的信息,百线激光雷达水平与垂直角度分辨率可达到 0.1-0.2 °,而 4D 成像雷达短期内难以做到 1 °以下。
成本价格方面,根据与非研究院披露的信息,激光雷达成本价格在 1000 美元左右,而 4D 成像雷达成本约为激光雷达的 1/10 。
工作环境方面,与摄像头和激光雷达相比,毫米波雷达受天气影响较小,恶劣天气条件带来的环境污垢或水滴折射不会影响雷达工作。
穿透能力方面,毫米波雷达也可以穿过介电材料(例如汽车保险杠)发射信号,因此它不需要开放的窗口来收发信号。此外, 4D 成像雷达能够穿过前方障碍物探测到激光雷达无法探测到的前前方障碍物。
图 10 : 4D 毫米波 vs 3D 毫米波 vs 激光雷达 & 摄像头
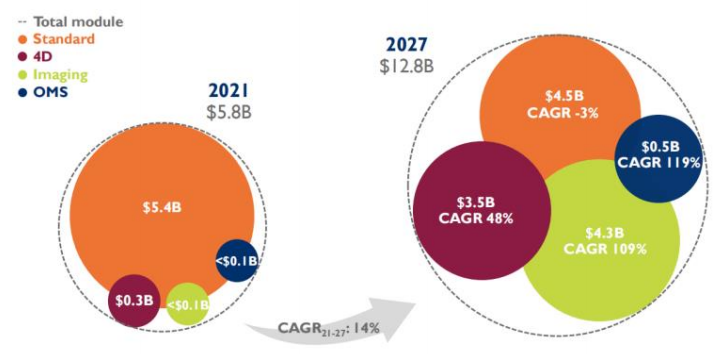
随着自动驾驶级别的提高,4D 成像雷达将在各级别自动驾驶方案中均得到更 多应用。 根据 Arbe 的预测, 4D 毫米波雷达将于 2024 年在欧洲与北美市场 L1-L4级别自动驾驶车型中开始列装。市场规模方面,根据 Yole 预测, 4D 毫米波雷达2021 年 -2027 年复合增长率将达到 48% ,而 4D 成像雷达 CARG 将达到 109%。中国市场方面,根据高工智能汽车研究院预测, 2023 年中国乘用车前装市场 4D成像雷达的搭载量有望突破百万颗,到 2025 年 4D 成像雷达占全部前向毫米波雷达的比重有望超过 40% 。
图 11 :自动驾驶级别提升与不同雷达用量 2020-2030 (北美 & 欧 洲)
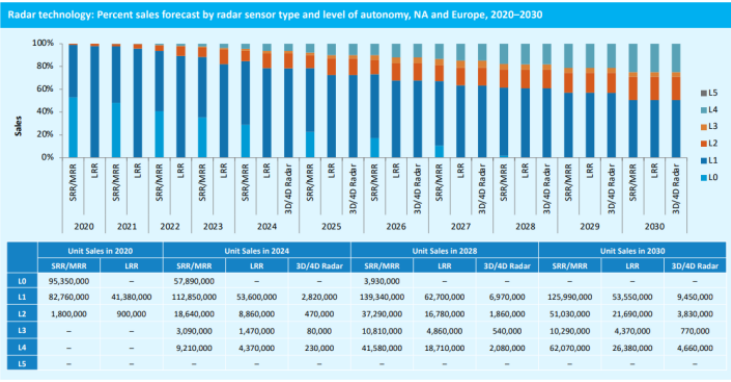
图 12 : 2021-2027 不同雷达市场规模增长幅度比较
3 4D 毫米波成像雷达技术路线演进
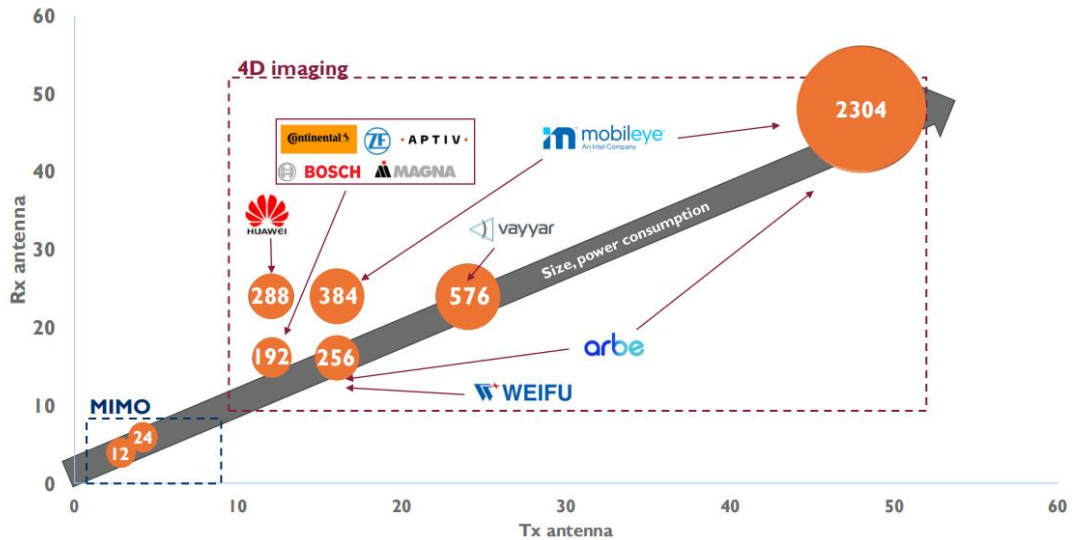
为了获取更好的角度分辨率,提高点云信号的密度,目前 4D 成像雷达的技术路线围绕增加通道数展开。对于多发多收的毫米波雷达而言,虚拟通道数为收发天线数的乘积。通过增加天线的数量和密度,可以优化角度和速度分辨率,使得输出点云图像更密集,更有效地分析测量目标的轮廓、行为和类别。目前,Arbe的 Phoenix 可做到 48 发 48 收,共计 2304 通道(高于大陆、采埃孚的 192 个)。据高工智能汽车公众号披露的信息, Mobileye 也已在部署具有 2304 个虚拟通道
的 4D 成像雷达,计划于 2025 年量产。
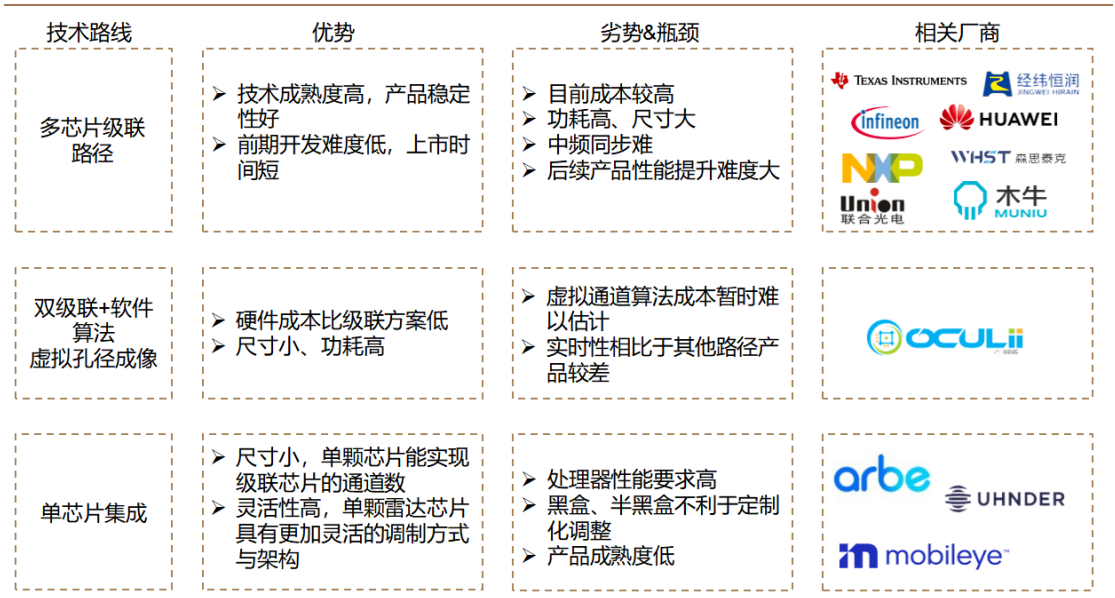
整体而言,为提升通道数目前主要存在三种技术方案,分别为多芯片级联、 虚拟孔径算法与单芯片集成 。
图 13 : 4D 毫米波雷达的方案趋势是通道数越来越多
多芯片级联方案指的是将标准雷达芯片通过 2 级联 /4 级联 /8 级联的方式实现 虚拟通道数的增加。多芯片级联方案的优点在于,该方案较为成熟,开发难度低,上市时间短,但弊端在于成本、功耗、体积较大,并且会面临 PCB 板面翘曲、中频同步等问题。此外该方案并非长久之计,后续产品性能提升困难。 目前采用多 芯片级联方案的厂商有大陆、 采埃孚、华为等。 以大陆为例,大陆 ARS 540基于 Xilinx 的 Zynq® UltraScale+™ MPSoC 平台开发, 是全球第一款量产的 4D成像雷达,宝马的下一代自动驾驶车辆 iNext 将首先使用。 ARS540 采用 4 片级联的形式,将 4 片 NXP 的 77GHz 毫米波雷达收发器(即 MMIC ) MR3003 级联,每个 MR3003 是 3 发 4 收, 4 片就是 12 发 16 收,形成 192 个虚拟通道,大大提升了分辨率,效果逼近 8 线激光雷达。
图 14 :大陆 ARS540 立交桥信号效果
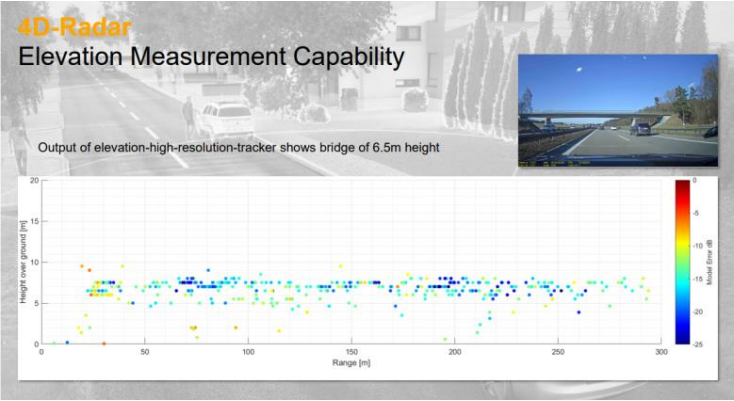
图 15 : NXP MR3003 结构图
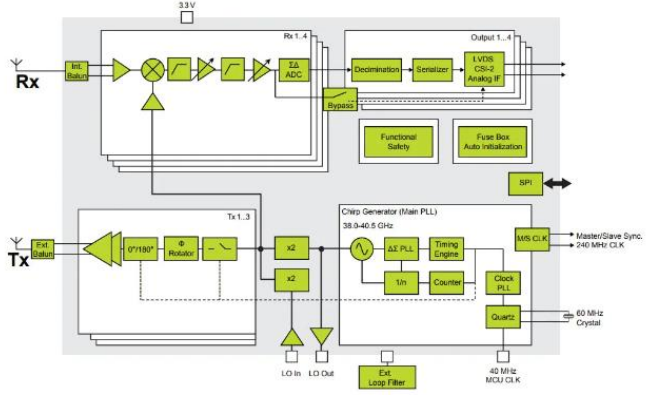
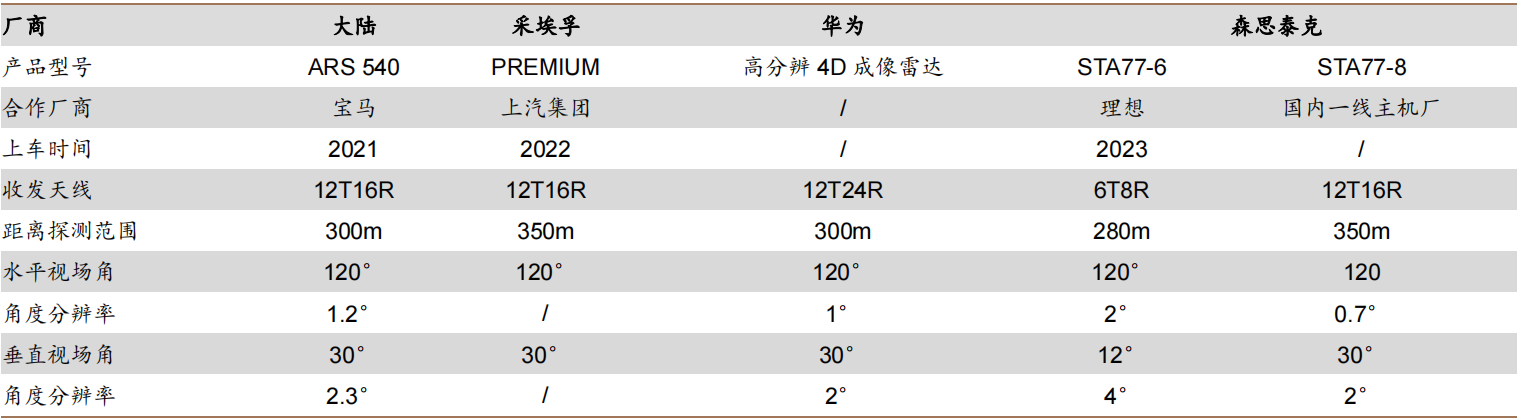
表 3 :采用级联方案的部分厂商与产品
虚拟孔径成像方案指的是每根接收天线在不同时间产生不同的相位,有效虚拟出更多的接收天线,创建出很大的“虚拟孔径”。与传统雷达依赖堆叠天线数相比,该方案使用软件智能增加处理的数据量,从而提升雷达的分辨率与灵敏度。虚拟孔径成像技术的优点在于硬件成本与功耗较低,尺寸也偏小,缺陷在于需要先通过算法的方式实现通道数量的增加,实时性较差。
目前采用虚拟孔径成像方案的是傲酷。傲酷的 FALCON 77 GHz 成像雷达在单芯片 (3T4R) 平台上的宽 FOV 范围内提供高角度分辨率和仰角信息,通过虚拟孔径成像技术使角分辨率提高了 20 倍。傲酷的 EAGLE 77 GHz 成像雷达采用的是双芯片非级联,通过虚拟孔径成像技术可使角分辨率提高 50 倍。目前,傲酷已经与包括通用汽车、戴姆勒、吉利、长城汽车、海拉、松下、摩比斯、 AutoX 等多家国内外知名主车企巨头、 Tier1 及自动驾驶公司等展开深度合作。
表 4 :傲酷两大产品参数


单芯片集成方案指的是将多发多收天线集成在一颗芯片中。该方案的优点一方面在于硬件尺寸较小,另一方面在于具有更加灵活的调制方式与架构。整体而言,该方案可将毫米波雷达的体积大大缩小,并可以市场上每通道最低的成本实现了最先进的射频性能,但仍存在两大挑战:一是是对处理器要求高,单芯片实现的数据量更多,对 MCU 性能提出更高要求,二是天线布局、干扰、信噪比等问题仍需要大量验证。
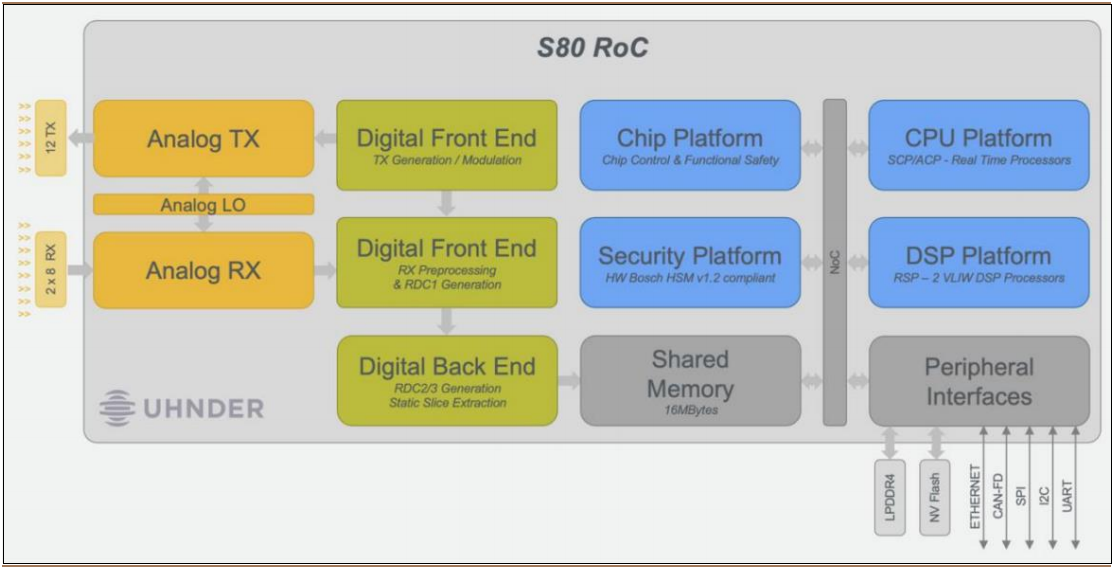
目前采用单芯片集成方案的厂商有 Vayyar 、 Uhnder 等。 Vayyar 曾推出一款车规级 ROC ( Radar on Chip ),搭载 48 个收发天线 + 数字信号处理器 (DSP)+实时信号处理微控制器单元 (MCU) 。 Uhnder 曾推出一款 77 GHz 的车规级 4D 数字成像 ROC ,型号为 S80 。这款产品采用调相连续波( PMCW ),搭载天线 12 发16 收,共 192 个通道。该设备的 DCM(数字调码技术)最大限度地减少了相邻雷达的相互干扰,并提供了高对比度分辨率 (HCR )以及独立目标的高可信度检测。2022 年 Uhnder 与欧菲光共同宣布将基于 Uhnder 的 DCM,研发智能驾驶高级辅助系统( ADAS ),并将于 2023 年发布一款数字雷达产品。
图 16 : Uhnder S80 ROC 产品框图
4D 毫米波雷达短期以级联+虚拟孔径方案为主,未来看好单芯片集成方案。短期而言,厂商需要尽快推出 4D 毫米波雷达抢占市场份额,而级联方案基于成熟的标准雷达芯片打造,前期开发难度低,便于资本雄厚的公司快速实现产品量产。然级联方案下,堆叠芯片带来的尺寸问题、多芯片之间存在干扰等问题严重限制了级联方案提升通道数的上限,故级联方案并非为长久之计。虚拟孔径成像方案则是在少量芯片级联的基础上,通过算法去提升通道数,该方案的优点在于能够降低 4D 毫米波雷达的价格,便于产品的渗透,但该方案在实时性上的不足也使得其难以成为高阶自动驾驶上的选择。单芯片方案能够满足 4D 毫米波雷达小型化的需求,同时在成本上也存在优势,虽然目前在算法与硬件上仍需攻关,但我们认为单芯片集成方案有望成为未来 4D 毫米波雷达的主流技术路径。
图 17 : 4D 毫米波雷达三种技术方案对比




)



)
)









