我就废话不多说了,大家还是直接看代码吧~
import numpy as np
kernel = np.array([1, 1, 1, 2]).reshape((2, 2))
print(kernel)
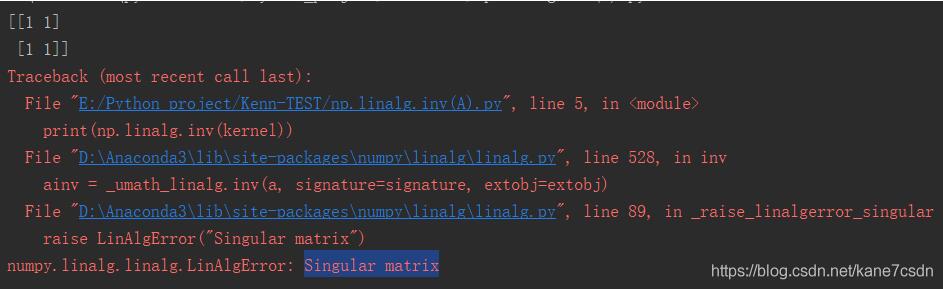
print(np.linalg.inv(kernel))
注意,Singular matrix奇异矩阵不可求逆
补充:python+numpy中矩阵的逆和伪逆的区别
定义:
对于矩阵A,如果存在一个矩阵B,使得AB=BA=E,其中E为与A,B同维数的单位阵,就称A为可逆矩阵(或者称A可逆),并称B是A的逆矩阵,简称逆阵。(此时的逆称为凯利逆)
矩阵A可逆的充分必要条件是|A|≠0。
伪逆矩阵是逆矩阵的广义形式。由于奇异矩阵或非方阵的矩阵不存在逆矩阵,但可以用函数pinv(A)求其伪逆矩阵。
基本语法为X=pinv(A),X=pinv(A,tol),其中tol为误差,pinv为pseudo-inverse的缩写:max(size(A))*norm(A)*eps。
函数返回一个与A的转置矩阵A' 同型的矩阵X,并且满足:AXA=A,XAX=X.此时,称矩阵X为矩阵A的伪逆,也称为广义逆矩阵。
pinv(A)具有inv(A)的部分特性,但不与inv(A)完全等同。
如果A为非奇异方阵,pinv(A)=inv(A),但却会耗费大量的计算时间,相比较而言,inv(A)花费更少的时间。
代码如下:
1.矩阵求逆
import numpy as np
a = np.array([[1, 2], [3, 4]]) # 初始化一个非奇异矩阵(数组)
print(np.linalg.inv(a)) # 对应于MATLAB中 inv() 函数
# 矩阵对象可以通过 .I 求逆,但必须先使用matirx转化
A = np.matrix(a)
print(A.I)
2.矩阵求伪逆
import numpy as np
# 定义一个奇异阵 A
A = np.zeros((4, 4))
A[0, -1] = 1
A[-1, 0] = -1
A = np.matrix(A)
print(A)
# print(A.I) 将报错,矩阵 A 为奇异矩阵,不可逆
print(np.linalg.pinv(A)) # 求矩阵 A 的伪逆(广义逆矩阵),对应于MATLAB中 pinv() 函数
这就是矩阵的逆和伪逆的区别
截至2020/10/4,matrix函数还可以使用,但已经过时,应该是mat函数这种。
以上为个人经验,希望能给大家一个参考,也希望大家多多支持我们。如有错误或未考虑完全的地方,望不吝赐教。
时间: 2021-03-09


)


(示例代码))





)







