《测绘学报》
构建与学术的桥梁 拉近与权威的距离
复制链接,关注《测绘学报》抖音!
【测绘学报的个人主页】长按复制此条消息,长按复制打开抖音查看TA的更多作品##7NsBSynuc88##[抖音口令]
本文内容来源于《测绘学报》2020年第10期,审图号GS(2020)5551号。
基于状态和残差的北斗基准站观测数据表达与信息分级
周乐韬1 ,黄丁发1
,黄丁发1 ,袁林果1,冯威1,龚晓颖1,田玉淼1,张熙2,赵英豪1
,袁林果1,冯威1,龚晓颖1,田玉淼1,张熙2,赵英豪1
1.西南交通大学地球科学与环境工程学院测绘遥感信息系, 四川 成都 611756;2.四川省第一测绘工程院, 四川 成都 610049
基金项目:国家重点研发计划(2016YFB0501900);国家自然科学基金(41874008)
摘要:北斗卫星导航系统基准站通常直接存储传输原始观测量,导致了两种不利情况:①没有形成对用户的分级授权机制,任意用户通过原始观测量都可以获取基准站的精确空间基准、时间基准和大气基准数据,这会对基准站的安全构成潜在威胁;②原始观测量之间的强相关性导致其数据量很大,在北斗接收机观测显现网络化、不间断、高采样和多波段的趋势下,观测数据的海量爆发给数据的存储和传输都带来了巨大的压力。因此,本文提出利用状态和残差来表达北斗基准站观测数据。与通用的基于RINEX、Compact RINEX和RTCM等国际协议的数据服务相比,其优点是不但可以对不同级别用户进行信息分级授权,从技术上保障数据服务的安全,而且大幅减小了存储传输数据量和用户端计算量。同时本文证明了新的表达方式与原始数据等效,不会降低最终计算结果的精度。利用该方法可以建立具有自主知识产权的北斗观测数据存储和传输协议,并为高精度星基数据播发服务提供技术支持。
关键词:分级 状态 残差 数据协议 星基播发 网络RTK 精密单点定位


引文格式:周乐韬, 黄丁发, 袁林果, 等. 基于状态和残差的北斗基准站观测数据表达与信息分级. 测绘学报,2020,49(10):1265-1274. DOI: 10.11947/j.AGCS.2020.20190300.
阅读全文:http://xb.sinomaps.com/article/2020/1001-1595/20201003.htm
全文概述
基准站是北斗卫星导航系统的重要组成部分,在精确定位、导航和定轨领域发挥着重要作用。随着北斗卫星导航系统的高速发展,北斗基准站在全国的布设数量越来越多、范围越来越广,加强卫星导航定位基准站监管,保障国家地理信息安全十分必要[1]。2017年修订的《中华人民共和国测绘法》明确写入了基准站的建设和数据安全条款。该法的实施一方面为北斗基准站的数据安全服务提供了法律保障,另一方面,也使大量基准站为了免除法律责任而趋于保守地提供数据服务,造成了某种程度的资源浪费,特别是对具有高精度实时动态定位需求的产业发展造成了一定的影响。鉴于以上情况,为了更加安全、高效和积极地服务于经济建设和社会需求,北斗基准站数据服务面临几个亟待解决的问题。
北斗基准站数据服务的首要问题是基准站的安全问题。通常,用户需要获取基准站的观测数据并与本站数据进行联合解算,才能进行精确的定位导航。一旦基准站将这些数据提供给用户,相当于把其空间基准[2]、时间基准和大气基准全部暴露给用户,这会对基准站的安全构成潜在威胁,而大部分用户通常的需求是对自身进行精确定位授时,基准站的基准信息对其并非必要数据。因此,开发一种既可对空间基准、时间基准和大气基准授权用户提供数据分级服务,同时又不影响用户自身进行精确定位授时的数据表达方法,极具实用价值。目前的解决方法是利用虚拟基准站技术[3-4],设定一个远离原基准站的虚拟基准站,从而对用户屏蔽物理基准站的基准信息。但是虚拟基准站无法为基准信息授权用户提供准确基准信息,更无法提供独立的基准信息分级服务。
北斗基准站数据服务还存在数据量大的问题。由于北斗基准站布设数量的大幅增加,同时接收机的观测呈现不间断、高采样和多波段的特点,导致观测数据呈海量爆发,这给其存储和传输都带来巨大的压力。另外,对于地面通信不畅或缺失的地区,北斗基准站的数据服务有星基播发的需求,而卫星通信的带宽是有限的,因此减小传输数据量具有重要意义。使用数据编码的方法可以压缩数据量[5-6],但其缺陷是需要解压缩才能使用,计算量大且实时性差。目前,国际上通常采用Compact RINEX和RTCM格式。Compact RINEX使用历元间数据求差的方法压缩观测数据[7],RTCM使用同一个历元的不同类型的数据间求差的方法压缩观测数据[8]。两种格式的数据量得到一定程度的减小,但都是基于原始观测量的数据表达,而各卫星、各频率、各历元观测值之间都具有相关性,通过去相关的方法大幅减小其数据量则更有效。
为了解决上述两个问题,本文提出利用状态和残差来表达北斗基准站观测数据,将观测向量由观测空间映射到状态空间来降低数据维度,同时生成残差向量吸收未建模误差,在基准站接收机端从原始观测量直接分离基准、状态和残差信息,最大程度降低数据间的相关性和数据量。从而利用基准信息对分级授权用户进行基准信息服务,利用状态和残差信息进行定位、导航和授时服务。
1 基于状态和残差的观测数据表达
观测数据的残差和状态表达(state and residuals representation,SRR)方法[9]分为3个步骤:①从观测数据中消除基准信息,生成伪观测值;②进行状态估计和残差计算,即将伪观测向量表达为各元素之间相互独立的状态向量的线性组合,通过最小二乘把观测向量从高维(观测量的维数)空间向低维(状态量的维数)子空间(状态空间)进行投影,由于状态量各元素之间相互独立,从而削弱了相关性,达到减小数据量的目的;③残差的时域差分,由于观测模型的不完善导致残差向量时间序列通常含有有色噪声,因此残差量也具有时间相关性,故对残差进行时域差分,进一步减小数据量。如果要增加效率,还可以使用小波压缩方法[10]。这3个步骤可以在各个基准站接收机上实时独立完成,原始数据即可表达为状态和残差数据。
1.1 消除已知信息
基准站应该具有某参考框架下精确的空间坐标、配有标定好的原子钟,以及水汽辐射计和气温、气压、湿度等气象测量设备。因此,可以精确获取其空间基准、时间基准和天顶湿延迟基准。但大部分基准站条件有限,没有原子钟和水汽辐射计,只能获取其空间基准信息,因此,消除了已知信息的关于相位和码的伪观测值φ和ρ由式(1)计算

(1)
式中,下标i表示频率序号,通常基准站的观测频率个数大于等于2;ϕ和α表示相位和码观测值;λ为波长;R=|Xs-Xr|,表示星站几何距离;Xs和δ表示通过广播星历或精密星历计算的卫星坐标和卫星钟差(已做地球自转和相对论效应改正);Xr为基准站天线参考点的精确空间坐标;c为真空中光速;mh和mω表示干延迟映射函数和湿延迟映射函数[11];h和ω为天顶对流层干延迟和天顶对流层湿延迟,均使用国际地球自转服务约定模型[12-14],其中气象模型使用GPT2全球模型[15],对于配有水汽辐射计的基准站,ω则为水汽辐射计测量的天顶对流层湿延迟;pi为天线相位中心偏差改正[16-17]。对于长基线用户和精密单点定位用户,为了确保精度应使用精密星历。
1.2 状态估计和残差计算
相对于基准站坐标、天顶对流层延迟等低频信息,接收机钟差和电离层延迟变化较快,但可以假设短周期内(比如10s内)的电离层延迟变化和大部分基准站的接收机钟差符合线性模型,因此,在每周期内都可以建立接收机钟差、钟速、电离层延迟及其变化率的时不变观测模型

(2)
式中,下标i表示频率序号;ρ和φ是式(1)中消去已知信息的相位和码对应的伪观测值;f和λ是对应的频率和波长;dt是每个周期内的第1个历元的接收机钟差;dṫ是接收机钟速;Δt是该历元与周期内第1个历元的时间差;E=40.3c-2TEC,E定义为每个周期内第1个历元的路径电子含量;Ė为其变化率;u为相位未建模误差,其中包括了整周模糊度、硬件延迟和其他低频变化的误差(以周为单位);μ为接收机伪距相对硬件延迟,只与频率有关,与卫星无关,当频率个数为k时,设置k-1个码伪距相对硬件延迟参数[18];ε和ϵ代表观测噪声,均服从零均值高斯分布,ε的方差为10-4sin-2θ平方周,精码ϵ的方差为0.1sin-2θm2,粗码ϵ的方差为sin-2θm2,θ是对应卫星的高度角,在同一周期内,为了简化计算,可以认为卫星高度角为常数。
若一个周期内观测了m个历元,n颗卫星和k个频率(k>1),根据式(2)形成数学模型
 (3)
(3)
式中,

;φ和ρ均是通过式(1)计算的mnk行1列的伪观测向量,其中φ已经探测和修复了周跳,并剔除了粗差;Aφ和Aρ为对应于相位观测值和码观测值的系数矩阵,均为mnk行2+2n列;Bφ是mnk行nk+k-1列的矩阵,其中最后k-1列元素都为零;Bφ为mnk行nk+k-1列的伪距相对硬件延迟系数矩阵,该矩阵前nk列元素都为零;X是2+2n行1列的待估状态量,其中包括接收机钟差、钟速两个参数,以及n个路径电子含量参数和n个电子含量变化率参数;U为nk+k-1行1列的未建模误差参数,包括nk个相位未建模误差参数和k-1个伪距相对硬件延迟参数;ζ为2mnk行1列的观测噪声;ζ服从均值为零、方差为Dζ的高斯分布;Dζ为2mnk维的对角阵。
未建模误差U的变化是极缓慢的,但是在式(3)的模型中,受伪距噪声和多路径效应的影响,相邻周期的估值之间会发生很大的跳变,因此加入未建模误差的状态约束模型
 (4)
(4)
式中,U为上一周期的未建模误差估值;C=[0I],C为nk+k-1行2+2n+nk+k-1列的矩阵,I为nk+k-1维单位阵;ξ为nk+k-1行1列的状态转移噪声;Dξ为nk+k-1维的对角阵;对应于相位未建模误差的对角元素设为0.0004τ平方周,对应于伪距相对硬件延迟的对角元素设置为0.0001τm2,τ为周期时长,以s为单位。当使用新的数据龄期的广播星历时,τ设为无穷大。
上述模型在第一个周期是秩亏的,原因是路径电子含量没有约束条件,并且与伪距相对硬件延迟形成了秩亏自由网,为了减小路径电子含量的存储空间(值域范围),对其进行重心约束[19]
 (5)
(5)
式中,S为1行2+2n+nk+k-1列的系数阵,其对应于路径电子含量的n个参数的系数均为1,对应于其他参数的系数均为0;ζ为零均值,方差为σζ2的高斯噪声,通过统计Klobuchar模型[20-21]的斜路径电子含量的方差,将σζ2设为2500平方米之一。
联立式(3)、式(4)、式(5),通过最小二乘求解得到状态参数和未建模误差的估值,同时求得残差
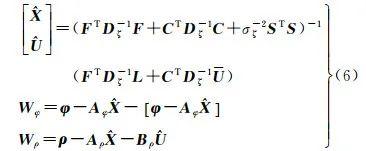
(6)
式中,Wφ为相位残差,单位为周; Wρ为伪距残差,单位为m;Û则作为式(4)的未建模误差预测值参与到下一个周期的计算。
Wρ为伪距残差,单位为m;Û则作为式(4)的未建模误差预测值参与到下一个周期的计算。
由于值域范围的减小,伪观测值L的数据量小于原始观测值的数据量,通过式(6)又可以将伪观测量L表达为状态量 W的形式。L的维度为2mnk,的维度远小于L,仅为2+2n;W的值域范围很小,其中Wφ的值域范围是[0, 1)。因此,基于状态和残差的观测数据表达方式能够大幅减小数据量。
W的形式。L的维度为2mnk,的维度远小于L,仅为2+2n;W的值域范围很小,其中Wφ的值域范围是[0, 1)。因此,基于状态和残差的观测数据表达方式能够大幅减小数据量。
对于采样间隔较大(10s及大于10s)的情况,周期时长与采样间隔相等,因此,一个周期只有一个观测历元,即每个历元都对接收机钟差和路径电子含量进行估计,式(2)中则不设钟速和路径电子含量变化率参数,式(3)也要进行相应的改变。限于篇幅,不再赘述。
1.3 残差的时域差分
当观测采样率较高时,残差量具有较强的时间相关性,本文使用时域差分方法减小其相关性,进一步减小数据量。Wφ和Wρ是一个计算周期内m个历元的所有残差值,所以可设

,则相对残差为

(7)
式中,j=1, 2, …,m-1。Wφ, j和Wρ, j是第j+1历元的相位和码残差,Wφ, 0和Wρ, 0是第一个历元的相位和码残差。显然,首历元的残差W0和其他历元的相对残差ΔWj比残差W的数据量小,因此,存储、传输W0和相对残差ΔWj更高效。
2 基准信息分级授权的数据服务方法
在式(1)中,基准站坐标和天顶对流层延迟为外部独立测量信息,可以作为空间基准和大气基准。如果没有外部独立测量信息,则可以通过式(6)进行估计,以状态的估值作为基准,式(2)中的接收机钟差和路径电子含量就是待估状态信息,其估值也可以作为基准。通常,利用外部独立测量的基准信息精度高,通过状态参数估计的基准信息精度较低。利用这些基准信息和残差信息进行组合,就可以提供基准信息分级授权的基准站数据服务。不同的基准站数据采样率和用户授权级别需要的数据类型是不同的,其关系见表 1,黑点代表需要的数据类型。
表 1 基准信息分级授权的基准站数据服务内容Tab. 1 Data service content of base station authorized by base information classification
| 采样间隔/s | 数据类授型权级别 | 基准站坐标 | 天顶对流层延迟 | 接收机钟差 | 接收机钟速 | 路径电子含量 | 电子含量变化率 | 残差 | 相对残差 |
| <10 | 民用差分 | ● | ● | ● | |||||
| <10 | 空间基准 | ● | ● | ● | ● | ||||
| <10 | 时间基准 | ● | ● | ● | ● | ● | |||
| <10 | 大气基准 | ● | ● | ● | ● | ||||
| ≥10 | 民用差分 | ● | ● | ||||||
| ≥10 | 空间基准 | ● | ● | ● | |||||
| ≥10 | 时间基准 | ● | ● | ● | |||||
| ≥10 | 大气基准 | ● | ● | ● | |||||
| ≥10 | 民用PPP | ● |
表选项
依据表 1,利用单基准站接收机自带处理器即可实时解算上述产品,并提供基准站数据服务:①对于定位导航、授时和气象应用需求的民用差分用户,可以只提供残差和路径电子含量数据(由于缺失基准站的基准信息,因此无法恢复原始观测值);②对于空间基准、时间基准和大气基准的单独授权用户和组合授权用户(通常是特许用户),不仅提供基准站的残差和路径电子含量数据,同时也提供相应的独立基准信息和组合基准信息;③对于最高级别用户,提供所有的基准信息和残差信息,这些信息与原始数据等效,可以通过其恢复原始观测值;④星基播发常用于精密单点定位或者广域差分,用户通常远离基准站,基准站路径电子含量与用户站路径电子含量间相关性很弱,因此,星基播发只需要播发残差量(需使用精密星历计算)。可以看出:民用精密单点定位用户需要的数据量最少,其次是民用差分用户,所需数据量最多的是基准授权用户;各状态量的存储和传输频率与其变化频率成正比,存储传输频率由低到高依次为基准站坐标、天顶对流层延迟、接收机钟差和钟速、路径电子含量及其变化率。残差量的存储和传输频率与原始观测值一致。
3 基于基准站状态及残差数据的解算模型
通过基准站单站处理,即可生成基准站状态及残差数据产品进行发布,无论是定位导航终端差分用户、精密单点定位用户,还是基准站网络服务端用户,都可以利用状态和残差数据产品建立解算模型。其解算模型与基于原始观测值的双差模型等价,计算量更小,本节予以证明。
3.1 终端用户差分解算模型
针对定位导航终端用户,利用上述基准站的路径电子含量和残差数据,可以建立差分模型

(8)
式中,▽为星间单差算子,▽(·)=(·)s-(·)r,其中上标s表示目标卫星,上标r表示参考卫星;Δ▽为双差算子,Δ▽(·)=(·)us-(·)ur-(·)rs+(·)rr,下标u表示用户站,下标r表示基准站; R0表示卫星坐标与用户站天线参考点概略坐标X0之间的几何距离(应该通过数据协议保障用户在相同的历元使用与式(1)一致的星历);
R0表示卫星坐标与用户站天线参考点概略坐标X0之间的几何距离(应该通过数据协议保障用户在相同的历元使用与式(1)一致的星历); x为3行1列的坐标改正数向量;mω为用户站上的湿延迟映射函数;N为整周模糊度。式(8)中路径电子含量Er和残差w是基准站服务数据;wφ表示基准站的相位残差;wρ表示基准站的伪距残差;φi和ρi都是用户站信息。
x为3行1列的坐标改正数向量;mω为用户站上的湿延迟映射函数;N为整周模糊度。式(8)中路径电子含量Er和残差w是基准站服务数据;wφ表示基准站的相位残差;wρ表示基准站的伪距残差;φi和ρi都是用户站信息。
结合式(1)、式(2)和式(6),可以推导出基准站上的星间单差数据符合式(9)

(9)
考察基于原始观测值的双差观测方程

(10)
式中,Δ▽R0表示参考卫星、目标卫星与用户站概略坐标、基准站形成的双差几何距离;

将式(9)代入式(8),容易证明式(8)和式(10)相位方程伪观测值之差为对应波长的整数倍,式(8)和式(10)测码方程伪观测值相等,式(8)待估参数系数矩阵与式(10)相同,式(8)与式(10)随机模型相同,所以式(8)与式(10)等价,两式解算的模糊度会有整数偏差,而待估参数固定解是完全相同的。因此,基于状态和残差数据的差分模型与基于原始观测值的双差模型最终结果完全相同。
比较式(8)与式(10)在用户端的计算量,发现式(10)还需要额外计算基准站的接收机钟差、站星几何距离、对流层延迟、相位中心偏差等,因此,使用本方法还可以减小计算量。
另外,式(8)也可用于网络RTK用户,通过基准站网络可以估计用户与主基准站间的路径电子含量,将其合并到主基准站的路径电子含量中,与主基准站的残差数据一同发送,用户就可以进行网络RTK定位,限于篇幅,不再赘述。
3.2 终端用户精密单点定位解算模型
针对精密单点定位用户,利用基准站的星间单差残差(精密星历计算),可以建立PPP模型

(11)
式中,基准站的星间单差残差包含了卫星端的所有未建模误差,包括了精密单点定位的相位小数偏差(fractional bias isolating,FBI)或未标定的相位延迟(uncalibrated phase delays,UPD)产品[22-24],Δ▽υi为基准站、用户站及卫星的精确模型改正量在路径方向投影的双差值,这些模型改正包括相位缠绕、固体潮汐、海洋潮汐(若测站靠近海洋)、电离层高阶项等,Δ▽υi在用户端进行计算(基准站须提供10km级精度的粗略坐标)。
3.3 基准站网络服务端解算模型
针对基准站网络服务端,利用各基准站的残差,服务端可建立基准站基线的差分模型

(12)
式中,Δ▽e为双差路径电子含量Δ▽E的改正数;Δ▽E为基准站状态量;当Δ▽e得到固定解后,可以求得基准站间的精确双差路径电子含量,从而为用户提供网络RTK服务。
考察基准站基线的双差观测方程,同理可以证明式(12)与基于原始观测值的双差观测模型等价

(13)
式中,Δ▽W为通过模型计算的基准站基线的双差对流层湿延迟。
比较式(12)与式(13)在服务端(数据中心)的计算量,同理可知式(12)计算量更小。
针对授时用户,通常只使用高度角最高的共视卫星建立基于状态和残差的授时观测模型,同理可以证明该模型与基于原始观测值的单差授时观测模型等价,限于篇幅,不再赘述。
4 数据实例
本文利用IGS-MEGX观测网的JFNG站(湖北九峰站)2019年1月10日10:30—11:30的采样率为1s的多模压缩数据还原成RINEX文件,使用其中的北斗三频观测数据;星历数据为广播星历;精确空间坐标为多个IGS分析中心的融合解,参考到IGS14框架(CGCS2000与WGS-84一致误差为厘米级[25])、参考历元为2019年1月10日;气象参数使用GPT2模型,天顶对流层干延迟和湿延迟使用Saastamoinen模型、映射函数使用GMF模型;天线相位中心使用igs14.atx模型;利用本文方法研制了GSRR(GNSS state and residuals representation)软件,将观测值表达为状态及残差数据。
图 1为观测时段内北斗三频B1、B3和B2频率(RINEX表达为L1、L6、L7)的码伪距和相位残差,伪距和相位残差都呈缓慢变化;残差主要包括轨道误差、卫星钟差残差、多路径效应、相位缠绕、地球固体潮汐等误差;如果要进一步减小残差值域,需要使用精密星历,并且对上述误差进行改正;当相位残差大于1或者小于0的值时,自动加入1周周跳,让残差恢复到1周范围内,这种周跳很容易修复;图中相位残差中的飞点是接收机钟差发生较大跳变导致的状态估值产生的偏差,从而使残差产生相应的变化。

图 1 北斗三频(L1、L6、L7)伪距残差及相位残差Fig. 1 Pseudorange and phasere sidualsat three frequencies of BeiDou L1, L6, L7
图选项
图 1显示码伪距残差的值域为±5m以内,相位残差的值域为1周以内,若设置码伪距残差的截断误差(分辨率)为2cm、相位残差截断误差为0.001周,则本文方法最多用3位有效数字(0~999)就可以表示码伪距或相位残差,而RINEX格式中码伪距或相位观测值则需要14位。
除了残差以外,本方法还需要记录状态信息,包括路径电子含量和接收机钟差等效距离,如图 2和图 3所示,可以看出路径电子含量和接收机钟差等效距离具有很强的时间相关性,可以使用文中的时域差分方法进一步减小数据量。
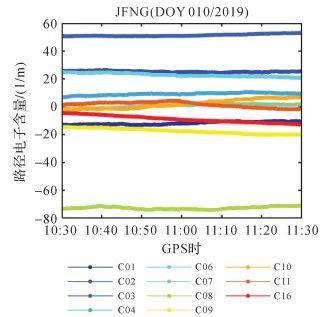
图 2 路径电子含量Fig. 2 Electron content on slant path
图选项

图 3 接收机钟差等效距离Fig. 3 Equivalent distance of receiver clock offset
图选项
图 4第1、2和3数据块分别显示了JFNG站北斗观测数据的RINEX格式数据、Compact RINEX格式数据和状态及残差表达(SRR)的数据,可以直观地看出SRR格式数据量最小。该时段北斗三频数据的RINEX格式、Compact RINEX格式数据和SRR格式的文本文件大小分别为5874KB、1403KB和1032KB,SRR格式的文件是RINEX文件大小的17.5%,是Compact RINEX文件大小的73.5%。

图 4 RINEX格式、Compact RINEX格式和SRR格式数据量对比Fig. 4 Data volume comparison of RINEX format, compact RINEX format and SRR format
图选项
表 2显示了1个观测周期内观测了m个历元n颗卫星k个频率的数据时,RINEX格式、SRR文本格式、RTCM MSM格式和SRR二进制格式的数据量的对比情况。通过对大量数据的解算结果进行统计,可以确定残差和状态的值域范围:其中伪距残差的值域为[-5.12, 5.10],单位为m,伪距相对残差的值域为[-1.28, 1.26],单位为m;SRR文本格式中相位残差值域为[0, 0.999],单位为周,相位相对残差值域为[-0.128, 0.127],单位为周;SRR二进制格式中相位残差值域为[0, 0.998],单位为周,相位相对残差的值域为[-0.128, 0.126],单位为周;路径电子含量值域为[-409.6, 409.5],单位为m-1,路径电子含量变化率值域为[-1.28, 1.26],单位为m-1s-1;接收机钟差值域为[-524.288, 524.287],单位为m,接收机钟速值域为[-0.2048, 0.2046],单位为m/s;根据上述状态和残差的值域及表 2中对应的分辨率,就可以确定其数据量的大小。其中SRR文本格式的相位残差分辨率设置与RINEX相位观测值分辨率一致,SRR二进制格式的相位残差分辨率设置略高于RTCMMSM相位观测值的分辨率,因此,其相位数据精度完全能与原始数据保持一致。SRR二进制格式的伪距残差分辨率与RTCMMSM伪距观测值分辨率一致,均为0.02m。在实际数据处理中,由于观测噪声和多路径效应的影响,伪距分辨率设为0.02m已经足够,因此,RINEX格式的伪距观测值分辨率过高(0.001m),SRR文本中,设置伪距残差分辨率为0.02m。
表 2 各数据格式数据量对比Tab. 2 Data volume comparison of different data formats
| 项目 | 码伪距(残差) | 相位(残差) | 路径电子含量 | 路径电子含量变化率 | 接收机钟差 | 接收机钟速 |
| RINEX/字符 | 14mnk | 14mnk | ||||
| RINEX分辨率 | 0.001m | 0.001周 | ||||
| SRR文本/字符 | ≤3mnk | ≤3mnk | ≤4n | ≤2n | ≤6 | ≤4 |
| SRR分辨率 | 0.02m | 0.001周 | 0.1m-1 | 0.02m-1/s | 0.001m | 0.0002m/s |
| RTCMMSM/位 | 15mnk | 22mnk | ||||
| RTCM分辨率 | 0.02m | 0.0005m | ||||
| SRR二进制/位 | 2nk+7mnk | 2nk+7mnk | 13n | 7n | 20 | 12 |
| SRR二进制分辨率 | 0.02m | 0.002周 | 0.1m-1 | 0.02m-1/s | 0.001m | 0.0002m/s |
表选项
根据表 2,假设某观测时段内观测了10个历元,每历元观测10颗北斗卫星,每颗卫星有3个频率,RINEX观测值数据量为8400字符,SRR文本格式数据量不超过1870字符,后者为前者的22.2%,RTCM MSM观测值数据量为11100比特,SRR二进制格式数据量为4552比特,后者为前者的41%,数据量得到显著减小。
5 结论
本文提出利用状态和残差(SRR)来表达北斗基准站观测数据,从而分离基准数据、状态和残差数据,研制了SRR数据产品生成软件——GSRR,设计了基准站数据分级授权服务方法,证明了基于SRR数据的解算模型与基于原始观测值的解算模型的等价性。与通用的基于RINEX、Compact RINEX和RTCM等国际协议的数据服务相比,本文阐明了SRR数据服务具有以下优势:①可以对不同级别用户进行基准信息分级授权,非授权用户无法获取基准信息,从技术上保障基准站数据服务的安全;②大幅减小了存储传输数据量和用户端计算量,并利用数据实例进行了验证。与RINEX相比,SRR文本数据量减小了近80%;与RTCM MSM相比,SRR二进制数据量减小了近60%。利用该方法可以建立具有自主知识产权的北斗观测数据存储和传输协议,并为高精度星基数据播发服务提供技术支持。
作者简介
第一作者简介:周乐韬(1977-), 男, 副教授, 博士生导师, 研究方向为大地测量与导航。E-mail:ltzhou@swjtu.edu.cn
通信作者:黄丁发, E-mail:dfhuang@swjtu.edu.cn


重磅!! | 姚宜斌, 杨元喜, 孙和平, 李建成:大地测量学科发展现状与趋势
综述 | 楼良盛,刘志铭,张昊,钱方明, 黄艳:天绘二号卫星工程设计与实现
通知丨关于举办第三届遥感应用技术论坛的通知
回顾经典 | 王任享, 王建荣, 李晶, 等:天绘一号03星无控定位精度改进策略

权威 | 专业 | 学术 | 前沿
微信、抖音小视频投稿邮箱 | song_qi_fan@163.com
欢迎加入《测绘学报》作者QQ群: 751717395
进群请备注:姓名+单位+稿件编号




![streaming接mysql数据库_[Spark streaming举例]-- 实时统计并且存储到mysql数据库中](http://pic.xiahunao.cn/streaming接mysql数据库_[Spark streaming举例]-- 实时统计并且存储到mysql数据库中)




:语言处理和Python)

)



搭建网站(nginx+php+mysql+ddclient))


![一帮一python_[python]L1-030 一帮一 (15分)](http://pic.xiahunao.cn/一帮一python_[python]L1-030 一帮一 (15分))
