智慧高速车路协同需要更加稳固的技术基座
智慧高速是中国高速公路建设的热点之一,车路协同又是未来智慧高速建设的核心内容。高速公路运行环境相对简单、主体权责清晰、路侧机电设施齐全,具备开展车路协同创新示范的良好条件。
广西交科集团(以下简称“广西交科”)是一家在广西乃至全国交通运输系统中具有重要影响力的高新技术企业,作为交通基础设施领域综合解决方案供应商,广西交科市场拓展至全国20个省份及东盟各国,占据广西全省交通科技行业主要市场,其中高速公路相关业务占据集团业务相当重要地位。
在这样的背景下,广西交科积极开展智慧高速车路协同技术的相关研究,初步构建载运工具、交通基础设施、通行环境互联的交通控制网基础云平台,模拟各类交通应用场景、算法及关键流程,旨在通过探索并构建生态完善、功能适配的“车-路-云”产品和技术互联互通需求的示范场景,建设车路协同智能网联生态基地,为远期车路协同智慧高速项目的落地应用奠定基础。
满足8大需求,实现园区道路全感知智能网联
车路协同作为5G、高精定位、大数据等新技术与智慧交通相结合的重要场景,在新一代智慧高速系统迭代升级中发挥重要作用,组成交通智能物联网,实现业务全流程线上化,使原本巨量、孤立的数据实现融合性采集、传输、存储与分析应用,推动智慧高速数据智能化、业务智能化。
广西交科车路协同智能网联示范园区建成后,将实现本园区内人、车、气象等信息的全面感知,提供道路信息服务和道路安全防控服务,并且具备可控制性、可复制性、可持续性。示范园区将作为进一步开展雷视融合技术研究和智慧高速车路协同技术研究的基础性设施,为未来相关技术和设备的更新迭代提供测试平台。
广西交科从实际业务需求角度出发,提出了8大需求:
1、安全类
感知数据共享:路侧单元RSU利用摄像头、雷达等传感器感知设备,探测周围其他交通参与者/道路异常情况,然后在V2X的支持下共享给周围的车辆,从而减少因视距限制而出现的交通事故。
协作式变道:车辆行驶过程中若要变道,将自身的行驶意图通过V2X发送给周围车辆和路侧RSU。演示车辆收到前车信息后做出调整,从而保证其安全完成变道。
弱势群体安全通行:路端RSU通过相机与边缘计算设备处理后得到行人信息,并与车辆进行通信,进行潜在风险预警。
2、信息服务类
差分数据服务:利用雷视融合技术形成基准点与运动点的经纬度误差校正,差分数据提高移动目标定位精度,呈现出车道级精度虚拟行驶轨迹。
道路环境信息服务:利用2D或3D数字孪生级IoT技术将道路信息数字化通过RSU发布路侧气象环境信息、道路积水情况和道路车况、车流量等数据至智能网联汽车或自动驾驶车辆。
3、效率类
协作式优先车辆通行:智能交通系统调度交通资源针对优先车辆采取提前预留车道、封闭道路或切换信号灯等方式,让优先车辆在安全高效的情况下到达目的地,开启绿色通道。
4、交通管理类
数据采集:路侧感知设备采集路况以及交通违法事件等ITS基础数据,如前方拥堵或施工,通过云控平台控制中心控制信号面板引导车辆同行,并下发消息给路侧设备RSU,通过V2X通信系统推送给行驶车辆。
5、自动驾驶类
将单车智能和车路协同相融合,L3/L4汽车结合ADAS实现辅助驾驶,同时通过路侧感知设备信息与车端信息进行交互协同处理,提升预警准确度,提高自动驾驶安全性。
6、综合类
模拟高速匝道汇车,路侧单元RSU获取周围车辆运行和行驶意图,发送车辆引导信息,协调匝道和主路汇入车道车辆,引导匝道车辆安全、高效地汇入主路。
7、展示类
作为交通管理者有效的研判辅助,利用建模与虚拟影像等技术并结合一系列仿真技术,实现道路真实环境的映射,大信息量数据的可视化展现,提高整体交通事件处理效率。
8、生态类
未来智能网联必将会从试验场先导区走到公众中,所以本次建设方案中也需要设计有与气象、市政设施等相关设备的联合场景,通过不断实践探索出更多的车联网运营模式。
基于以上的诉求,广西交科选择九州未来,共同建设车路协同智能网联示范园区。九州未来团队第一时间了解企业需求、结合企业发展特点,经过深入分析后,给出了综合性的解决方案。
园区范围约300m*250m,双向两车道道路环绕园区一周,总长约900m,宽约6m,园区内建筑物多,路边植被茂盛,拐角路段多。运用OpenV2X开源项目的技术优势,采用雷达+摄像机一对一的方式将环园区道路进行全覆盖,实现园区道路全感知智能网联。
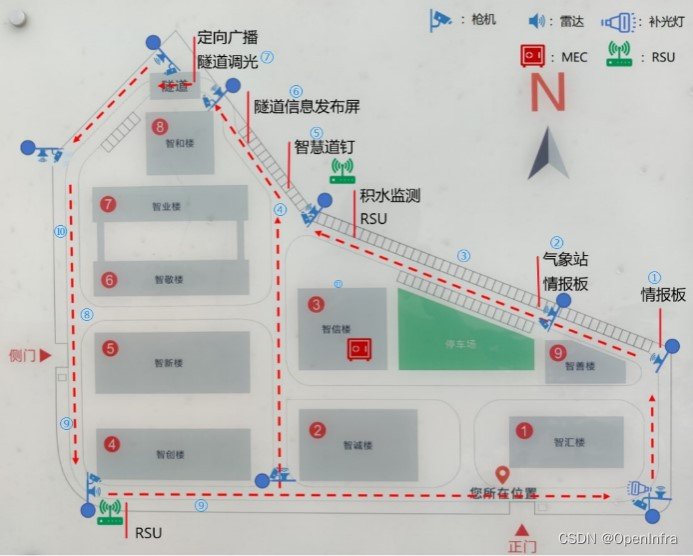
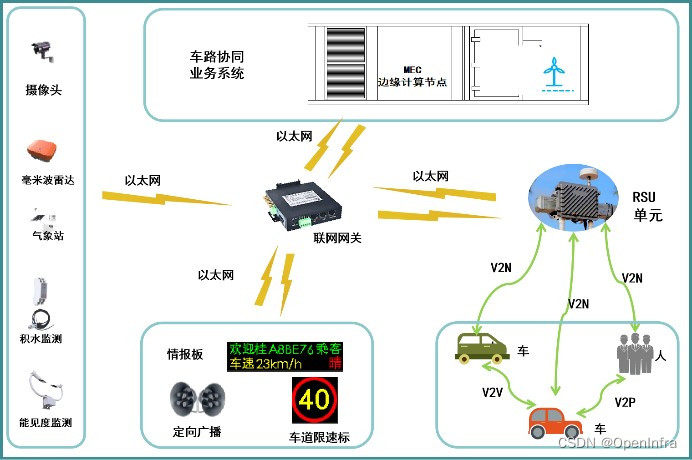
前端物联感知设备采集的人、车、路相关数据及自身状态数据后,经联网网关上传至车路协同综合管理平台,为道路管控和设备健康运维决策提供数据支撑。综合管理平台部署于容器化边缘计算平台,实现核心算法、运算存储、设备管理及决策支持等功能。综合管理平台将决策后的预警与管控策略经联网网关下发至路侧信息发布终端显示(情报板、广播、车道限速标),并经RSU由C-V2X通信系统推送至自动驾驶小巴车载信息发布终端(车载显示终端、车载语音),车载OBU利用C-V2X无线传输技术将自身车辆行驶状态、驾驶意图和车辆感知信息推送至相邻车辆或经RSU上传至综合管理平台供融合计算决策,并在数字孪生大屏上进行呈现。
该解决方案的核心技术亮点在于:
- 充分运用OpenV2X开源项目技术优势,实现雷视融合感知分析、生成标准结构化数据、RSU设备接口对接及部分V2X应用场景算法实现等功能需求。基于OpenV2X开源版本,结合客户定制化需求,进行功能扩展及第三方系统对接适配。
- 通过在前端布设雷达、摄像机、气象站、积水监测仪等感知设备以及RSU、情报板来实现车路协同,在后端基于容器化边缘计算平台,实现数据处理和整合,并在云控平台上展示数字孪生、车辆轨迹跟踪、交通流实时仿真、交通事件实时展示、交通安全管控、前端设备控制等功能。在园区内形成闭环,实现车路协同多场景全流程全要素的完整呈现。
- 在园区内试运行自动驾驶小巴,并模拟各类交通事件,包括前方事故、车辆汇入、气象监测、积水监测、道路施工、道路封闭、智慧道钉、隧道提醒、行人穿越、车辆逆行、车辆超车等,充分重现了城市道路或高速公路会遇到的各类车路协同应用场景,并通过雷视融合、边缘计算及V2X通信等技术进行实现,提供准全天候运行的环境,为将来新技术、新设备、新场景的验证提供条件。
为未来智慧建设打造新的标杆
经过双方合作的持续深入,园区建成运营后带来全场景体验:
- 将雷达及视频采集到的数据通过雷视融合、轨迹拼接等算法处理,最终输出每辆车的完整轨迹数据(包括车辆GPS坐标、车牌、车型、车系、颜色、速度等)投影至数字孪生平台进行渲染:

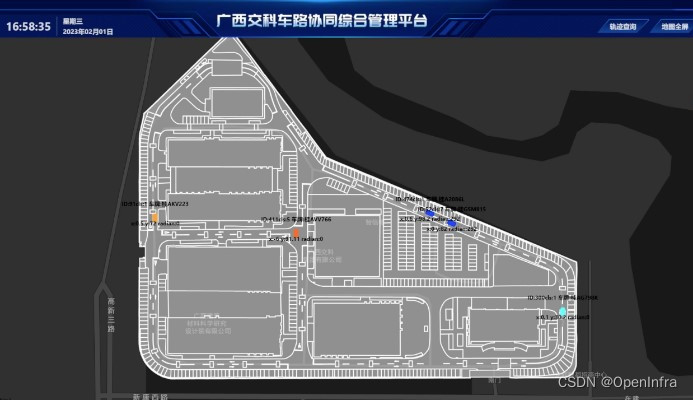
- 在园区内试运行自动驾驶小巴,车牌信息在园区出入口相机识别录入,在园区内车辆车牌信息通过拟合算法接续,实现车辆的实时跟踪及园区的安全管控,并采用3D数字孪生界面及视频监控界面同步展示:

- 在园区2D地图上,对车辆进行实时标定和目标渲染,实现以上帝视角俯视图查看园区内当前所有车辆状态、实时运动轨迹及各类事件播报:
- 通过人为创造和模拟十多类典型的车路协同应用场景或事件:


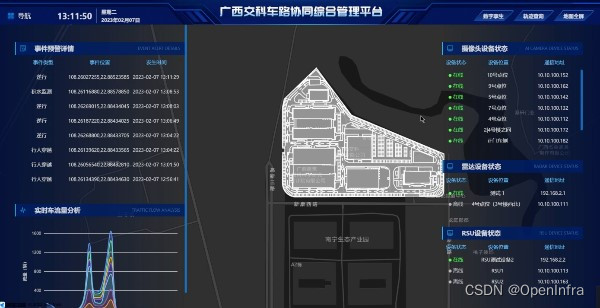
- 园区综合管理平台实现核心算法、运算存储、设备管理及决策支持等功能:

小结
在国家的“十四五”规划中,强调了要加强智慧交通基础设施建设,逐步提升综合交通基础设施规划、设计、建设、运营、养护等全要素、全周期数字化水平,建设基础设施建管养生命全周期应用示范。交通强国纲要也明确提出,要全面提升城市交通基础设施智能化水平,加强智能网联汽车(智能汽车、自动驾驶、车路协同)研发,形成自主可控的完整产业链。因此,道路交通数字化智慧建设具有重要意义。
九州未来为广西交科建设智能网联车路协同示范园区提供了坚实的技术基座,助力广西交科实现园区内车路协同相关关键技术及应用场景的落地实施,加快智能网联相关关键技术的研究与创新,形成可控制性、可复制性、可推广性的真实测试验证环境,为后续车路协同智慧高速项目的拓展提供理论基础和项目经验。



)









:两阶段提交协议与三阶段提交区别)
)




