工业视觉系统相关知识和选型介绍(一):相机篇
- 一、工业视觉系统
- 二、工业相机
- 三、关键名词解释
- 四、工业相机选型
- 五、工业相机品牌
- 六、相机选型实例
一、工业视觉系统
1.机器视觉就是用机器代替人眼来做测量和判断。机器视觉系统是指通过机器视觉产品(即图像摄取装置,分CMOS 和CCD 两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。
2.视觉系统主要由以下部分组成
1)照明光源
2)镜头
3)工业摄像机
4)图像采集/处理卡 (模拟相机)
5)图像处理系统
6)其它外部设备
模拟相机视觉系统(数字相机无图像采集卡)

二、工业相机
工业相机:机器视觉系统中的一个关键组件,其最本质的功能就是将光信号转变成有序的电信号。选择合适的相机也是机器视觉系统设计中的重要环节。

工业相机特点与普通相机的区别:
1、工业相机的性能稳定可靠易于安装,相机结构紧凑结实不易损坏,连续工作时间长,可在较差的环境下使用,一般的数码相机是做不到这些的。
2、工业相机的快门时间非常短,可以抓拍高速运动的物体。
(例如,把名片贴在电风扇扇叶上,以最大速度旋转,设置合适的快门时间,用工业相机抓拍一张图像,仍能够清晰辨别名片上的字体。用普通的相机来抓拍,是不可能达到同样效果的。)
3、工业相机的图像传感器是逐行扫描的,而普通的相机的图像传感器是隔行扫描的。
4、工业相机的帧率远远高于普通相机。工业相机每秒可以拍摄十幅到几百幅图片,而普通相机只能拍摄2-3幅图像,相差较大。
5、工业相机输出的是裸数据(raw data),其光谱范围也往往比较宽,比较适合进行高质量的图像处理算法,例如机器视觉(Machine Vision)应用。而普通相机拍摄的图片,其光谱范围只适合人眼视觉,并且经过了mjpeg压缩,图像质量较差,不利于分析处理。
6、工业相机(Industrial Camera)相对普通相机(DSC)来说价格较贵。
三、关键名词解释
1. 分辨率(Resolution):
相机每次采集图像的像素点数,一般对应于光电传感器靶面排列的像元数,如1920*1080。
2. 像素深度(Pixel Depth):
每位像素数据的位数,常见的是8bit,10bit,12bit。分辨率和像素深度共同决定了图像的大小。
结合最大帧率,可计算出一秒需要传输和处理的数据量:
例如对于像素深度为8bit的500万像素,则整张图片应该有
5000000*8/1024/1024/8=4.768 MB(1B=8bit,yte1024Byte=1KB,1024KB=1MB)。
增加像素深度可以增强测量的精度,但同时也降低了系统的速度,并且提高了系统集成的难度(线缆增加,尺寸变大等)。
3. 最大帧率(Frame Rate)/行频(Line Rate):
相机采集和传输图像的速度,对于面阵相机一般为每秒采集的帧数(Frames/Sec),对于线阵相机为每秒采集的行数(HZ)。
1)相机的帧率,一般来说分辨率越高,帧数越低
2)考虑到由运动控制等延时,我们的帧频要大于检测频率
3)人眼识别>16fps时会判断为连贯的,FPS为帧每秒。
结合见下面实例:一秒需要传输和处理的数据量
4. 像元尺寸(Pixel Size):
像元尺寸指芯片像元阵列上每个像元的实际物理尺寸,像元大小和像元数(分辨率)共同决定了相机靶面的大小。目前工业数字相机像元尺寸一般位3μm~10μm,通常的尺寸包括14um,10um,9um , 7um ,6.45um ,3.75um 等。
1)一般像元尺寸越小,制造难度越大,图像质量也越不容易提高。
2)像元尺寸从某种程度上反映了芯片的对光的响应能力,像元尺寸越大,能够接收到的光子数量越多,在同样的光照条件和曝光时间内产生的电荷数量越多。对于弱光成像而言,像元尺寸是芯片灵敏度的一种表征。
5. 靶面尺寸(长宽比通常为4:3):
也就是图像传感器感光部分的大小。越大,感光单元越多,像素越高一般用英寸来表示,和电视机一样,通常描述数据指的是图像传感器的对角线长度;
如常见的有1/3英寸,靶面越大,意味着通光量越好,而靶面越小则比较容易获得更大的景深。比如1/2英寸可以有比较大的通光量,而1/4英寸可以比较容易获得较大的景深。
1/4inch 3.2X2.4 mm
1/3inch 4.6x3.6mm
1/2inch 6.4 x4.8mm
2/3inch 8.8x6.6mm
1 inch 12.8x9.6mm

6. 光谱响应特性(Spectral Range):
是指该像元传感器对不同光波的敏感特性,一般响应范围为350nm~1000nm,一些相机在靶面前面加了一个滤镜,滤除红外线,如果系统需要对红外感光时可去掉该滤镜。

7. 曝光:
相机快门打开后,光线通过镜头进入到机身里,对感光元件(CCD)进行感光,直到快门关闭,这一过程叫曝光。
7.1 曝光方式(Exposure)和快门速度(Shutter)
1)线阵相机都是逐行曝光的方式,可以选择固定行频和外触发同步的方式,曝光时间可以与行周期一致,也可以设定一个固定的时间;
2)面阵相机有帧曝光、场曝光和滚动曝光几种常见方式,工业数字相机一般都提供外触发采图的功能,快门速度一般可到10ms,高速相机还会更快。
7.2 曝光时间
快门打开到关闭的时间间隔,目的是将光投射到照相感光材料的感光面。
曝光时间 < 视野高度/(图像高度*移动速度)
7.3 运动物体的曝光问题拖影:
拖影是在曝光的时候,拍摄目标与摄像系统之间存在相对运动形成的,因为这种 相对运动导致芯片上形成的图像一直在变化,各个部位的像元在曝光的过程中受到来自物体不同位置成像的影响,最终形成的图片是一个连续变化图像空间内图片的叠加。
物体只要是运动的,拖影就一定会有的,为了使其不对检测产生显著影响,不同的项目类型,对拖影相对长度的限制不尽相同。
运动速度和曝光时间是直接影响拖影的两个因素。为了保证图像中的拖影不超过s单位像素,则需要做到如下等价说法:
1)芯片上光学像在曝光时间内移动的位置不超过s单位像素;
2)物体与成像系统之间在曝光时间内相对移动(垂直于光轴平面内)距离不超过s单位的系统精度。
3)光像对芯片移动速度Vs与物体运动速度Vp之间关系为:
其实:光学系统中物方和像方所有的一维参数都是如上比例关系。
例如:某系统的拍摄精度是0.1mm/像素,相机曝光时间是1/2000秒,拍摄物体运动速度是10mm/s,这样目标在曝光时间内物体运动的距离是0.005mm<<0.1mm,因此可以用该系统拍摄。
8. 相机的触发方式:
1)连续采集模式:对静态检测可选择,产品连续运动不能给触发信号的可选择;
2)软件触发模式:对动态检测可选择,产品连续运动能给触发信号的可选择;
3)硬件触发模式:对高速动态检测可选择,产品连续高速运动能给触发信号的可选择。
9. 工业相机输出接口:
工业相机输出接口类型的选择主要由需要获得的数据类型决定。如果图像输出直接给视频监视器,那么只需要模拟输出的工业相机。如果需要将工业相机获取的图像传输给电脑处理,则有多种输出接口选择,但必须和采集卡的接口一致
10. 相机存储的文件格式:
bmp(原始)(无损),ipg(压缩);
11. 工业相机噪声:
噪声是指成像过程中不希望被采集到的,实际成像目标之外的信号。总体上分为两类,一类是由有效信号带来的散粒噪声,这种噪声对任何相机都存在;另一类是相机本身固有的与信号无光的噪声。它是由于图像传感器读出电路、相机信号处理与放大电路带来的固有噪声,每台相机的固有噪声都不一样。
12. 信噪比:
相机的信噪比定义为图像中信号与噪声的比值(有效信号平均灰度值与噪声均方根的比值),代表了图像的质量,图像信噪比越高,相机性能和图像质量越好。
13. 动态范围
在机器视觉系统中,反映每一个像元灰度质量的指标是动态范围,也是机器视觉系统要考虑的重要指标之一。工业相机的动态范围表明相机探测光信号的范围,对于固定相机其动态范围是一个定值,不随外界条件变化而变化。在线性响应中,相机的动态范围定义为饱和曝光量与噪声等效曝光量的比值:动态范围=光敏元的满阱容量/等效噪声信号动态范围可用倍数、dB 或Bit 等方式来表示。动态范围大,则相机对不同的光照强度有更强的适应能力。
四、工业相机选型
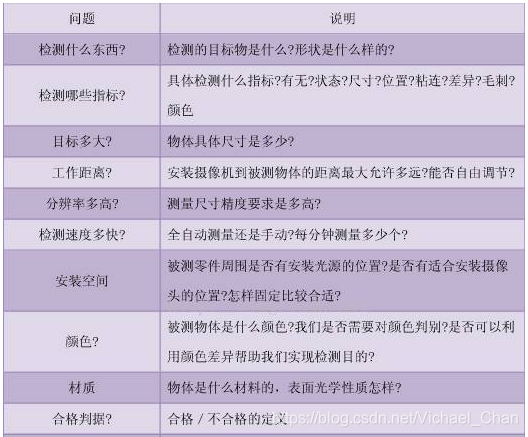
0.需求分析:
描述机器视觉系统需要完成的功能和工作环境,对于整个机器视觉系统的成功集成是至关重要,即设定工作目标。
1.分辨率估算:相机每次采集图像的像素点数,一般对应于光电传感器靶面排列的像元数:(面阵相机的分辨率有795×596,1024×1024,2048×2048,5320×5320等)
首先考虑待观察或待测量物体的精度,根据精度选择分辨率:
由:
相机像素精度 = 单方向视野范围大小/相机单方向分辨率。
得:
相机单方向分辨率 = 单方向视野范围大小/理论精度。
又 相机分辨率=感光芯片尺寸/像元尺寸,即:

根据实际应用即可选出恰当的 传感器尺寸(靶面尺寸)
例:若单视野为5mm长,理论精度为0.02mm,则单方向分辨率=5/0.02=250。然而为增加系统稳定性,不会只用一个像素单位对应一个测量/观察精度值,一般可以选择倍数4或更高。这样该相机需求单方向分辨率为1000,选用130万像素已经足够。
2.分辨率的确定:根据待测物体的尺寸估算出视野的大小,再结合检测精度,利用上面的公式就可以大概确定检测系统的工业相机的分辨率。
3.线阵相机OR面阵相机:
1)对于静止检测或者一般低速的检测,优先考虑面阵相机,对于大幅面高速运动或者滚轴等运动的特殊应用考虑使用线阵相机。
2)线阵相机的传感器只有一行感光元素,一般应用于需要高频扫描和高分辨率的场合。线阵CCD的优点是一维像元数可以做到很多,一般长度有2K,4K,8K,12K,但线阵CCD获取图像必须配以扫描运动,为了能确定图像上每一个像素点在被测件上的对应位置,还需要配以光栅等器件记录线阵CCD每一扫描行的坐标,并配以线阵相机专用的图像采集卡,这就导致线阵相机系统较为复杂,成本略高,并用容易受扫描运动的精度和稳定性的影响。面阵相机的像元在纵横两个方向上间隔的离散度是一致的,而线阵CCD的像元间距和扫描行距上一般是有差别的,由于扫描行距受机械传动部分的限制,远大于像元间距。
3)面阵相机有比线阵相机更多的感光镜片,以矩阵排列,例如常说的百万像素相机即表示感光镜片矩阵WH约等于10001000。面阵相机一次成像,它的分辨率指的是一个感光晶片代表的实物物体的大小。数值越小,分辨率越高,相同的相机选用不同集中的箭头,分辨率就不同。在表现图像细节方面,不是由相机的像素多少来决定的,而是由分辨率决定的。同等分辨率条件下,像素越多可以成像的区域面积越大。 

4.相机帧率选择:
1)尽可能选取静止检测,这样整个项目成本都会降低很多,但是会带来检测效率的下降。
2)当被测物体有运动要求时,要选择帧数较高的工业相机,相机的帧率一定要大于或等于检测速度,等于的情况就是你处理图像的时间一定要快,一定要在相机的曝光和传输的时间内完成;
3)选用帧曝光相机,行曝光相机则会引起画面变形,对于具体帧率的选择,不应盲目的选择高速相机,虽然高速相机帧率高,但是一般需要外加强光照射,带来的高成本以及图像处理速度也压力巨大,需要根据相对运动速度来定,只要在检测区域内,能捕捉到被测物即可。
4)一般来说分辨率越高,帧数越低
5.芯片类型选择:
CCD工业相机主要应用在运动物体的图像提取,如贴片机机器视觉,当然随着CMOS技术的发展,许多贴片机也在选用CMOS工业相机。用在视觉自动检查的方案或行业中一般用CCD工业相机比较多。 CMOS工业相机由成本低,功耗低也应用越来越广泛。
CCD采用逐个光敏输出,速度较慢,CMOS每个电荷元件都有独立的装换控制器,读出速度很快,FPS在500以上的高速相机大部分使用的都是CMOS。
6.相机接口选择:
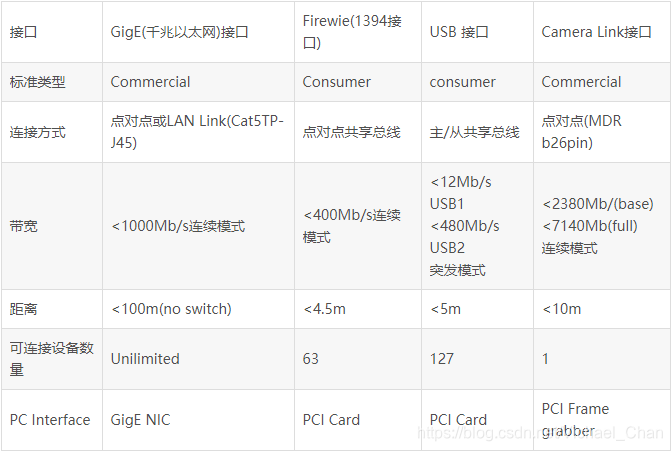
1)USB接口
系统只用到单个相机的可先择,USB接口直接输出数字图像信号,串行通信,支持热拔插,传输速度在120Mbps-480Mbps之间,优点:不需要占 PCI 插槽,帧频高,性价比高;缺点:占系统 CPU,传输距离问题,依然没有得到解决。
目前广泛采用的USB2.0接口,是最早应用的数字接口之一,具有开发周期短,成本低廉的特点。其缺点是传输数据较慢,传输数据过程需要CPU参与管理,占用资源,且由于接口没有螺丝固定,链接容易松动,最新的USB3.0接口使用了新的USB协议,可以更快的传输数据,但目前USB3.0的相机市场上不是很多。
2)1394a/1394b接口
系统用到多个相机的时候可先择,要求高速的时候可先择。优点:不占系统 CPU,帧频高;缺点:占 PCI 插槽,价格昂贵。
俗称火线接口,是美国电气和电子工程师学会(IEEE)制定的一个标准工业串行接口。所以又称为“IEEE1394”,现主要用于视频采集,数据传输率可达800Mbps,支持热拔插。电脑上使用1394接口需要使用额外的采集卡,使用不方便,且由于早期苹果对该技术的垄断,市场普及率较低,已慢慢被市场所淘汰。
3)GIGE千兆网接口
千兆以太网接口,PC标准接口,传输速率和距离都更高。是一种基于千兆以太网通信协议开发的相机接口标准,特点是快捷的数据传输速度和高达100米的传输距离。是近几年市场上应用的重点,使用方便,CPU资源占用少,可多台同时使用。
4)Camera Link接口
需要单独的Camera Link采集卡,成本较高,便携性低,实际应用中较少,但是是目前工业相机中传输速度最快的一种传输方式,一般在高分辨率的高速面阵相机和线阵相机上应用,价格昂贵,传输距离近。
7.色彩选择:
如果我们要处理的是与图像颜色有关,那当然是采用彩色相机,否则建议你用黑白的,因为黑白的同样分辨率的相机,精度比彩色高。
五、工业相机品牌
国外:
The imaging source 美国 线阵相机、面阵相机
Ids ueye 美国 线阵相机、面阵相机、智能相机
Microscan 美国 面阵相机、智能相机
JAI 丹麦 线阵相机、面阵相机、摄像机
Dalsa(达尔萨) 加拿大 线阵相机、面阵相机
Teli 日本 线阵相机、面阵相机
Cognex (康耐视) 美国 智能相机
AVT(德国)
Optronis
viwork(三宝)
balser(巴士乐)
国内:
大恒
嘉恒图像
海康威视
浙江大华
凌云
北京微视新纪元
六、相机选型实例
1.线阵相机选型实例:
某材料分拣要求:
如幅宽要求为1600毫米;
精度要求1mm/pixel;
目标运动速度32000mm/s;
步骤:
1)计算分辩率:幅宽/最小检测精度=每行需要的像素
1600/1=1600像素(选定2K 相机 即相机分辨率为:2024*1)
2)选定相机:幅宽/像素数=实际检测精度
1600/2048=0.78mm/pixel
3)每秒运动速度长度/除以实际精度=每秒扫描行数
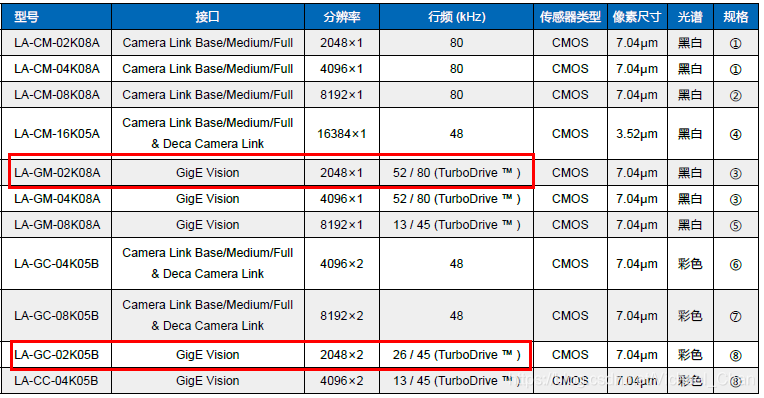
32000mm/0.78mm=41KHz(应选定相机为 2048*1像素+行频>=45kHz的 线阵相机,如下图,仅供参考 )
4)以加拿大工业相机品牌 “Teledyne DALSA” 线阵相机为例:



)
:镜头篇)



:MFC单文档程序运行流程梳理与总结)



:VS2013 +QT 5.8 运行、编译问题解决)


:QT MinGW 和 MSVC 编译方式)
T检验)


:Qt软件打包发布(QT5.8 _msvc2013_64+Win10_64))
