
来源:飞思实验室
文:小翼
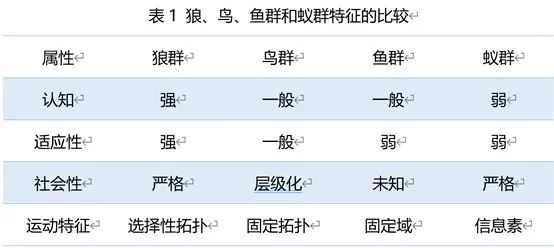
生物群集行为是自然界存在的一种普遍现象 ,先前的研究已表明人们可以通过模仿鸟群、鱼群、蜂群等行为, 研究其群体性决策机制, 进而用于构建集群系统的决策系统框架. 狼群在认知、分工, 以及复杂环境适应性等方面具有突出的优势, 尤其在群集行为中体现出主动学习、紧密配合, 以及快速响应等特征, 呈现出群智能的独特性质。表1列举了狼群、鸟群、鱼群, 以及蚁群在几种行为方面的不同特点 .在空战格斗等对抗环境下, 无人机集群所面临的是高动态的拒止环境. 与一般飞行环境相比, 对抗环境普遍存在敌方目标的信号干扰和火力威胁, 这使得无人机集群必须具备在有限探测能力下的快速精确的动作响应. 狼群群集行为体现出较强的应变能力和组织能力, 使得狼群系统即使在危险环境下也不会出现失控和崩溃, 面对比自身体型更大、力量更强的猎物能够采取灵活的配合与决策将其制服, 面对食物或领地竞争等突发事件也能够及时组织成员参与化解. 由此可见, 狼群群集行为与对抗环境下的无人机集群机动飞行紧密契合, 将狼群智能应用于无人机集群协同决策与控制过程, 对提升无人机集群对抗能力具有重要借鉴意义。
狼群智能与无人机集群协同决策在映射机理上存在一致性。首先, 两者行为特征相似。狼群系统在狩猎等威胁环境下的群集行为是典型的动态演变过程, 面对威胁目标需要利用快速准确的决策手段选择性地采取有利于自身的行动策略以实现对目标的牵制。对抗环境下的无人机集群则是在高动态的拒止环境下, 面对对抗目标需要进行分布式决策与控制 ,通过协同配合完成小组范围内对目标的夹击或追踪。其次, 两者在环境认知方面的需求相似。狼群需要借助团队配合和互助进行大范围狩猎环境的搜捕, 掌握围捕环境和狩猎目标的典型特征。无人机集群在拒止环境下需要借助多机信息交互和融合实现对动态目标的识别跟踪、对干扰信号的过滤. 再次, 两者的协同机制相似. 狼群系统稳定性和决策的一致性依赖于其内部的社会等级结构, 由于成员之间具有明确的交互关系, 当领导者确定群体任务并得到群集成员的认同后, 狼群系统会迅速做出正确决策. 无人机集群则通过建立本机与相邻友机的通信拓扑, 在集群成员之间达到决策的一致性协议, 结合准确的态势感知信息, 做出有利于态势发展的机动策略. 综上可见, 狼群智能行为机制可作为强化无人机集群对抗决策的重要依据。
如图1所示, 映射机理可着重从环境认知与决策机制两个方面考虑。在认知方面, 可借鉴狼群认知行为形态学特征, 抽象出一种群集态势信息感知计算模型。其中, 参照狼群对狩猎目标动态变化的敏感特征, 在计算模型中综合考虑对抗目标移动、外在特征、环境变化率等因素, 挖掘感兴趣区域. 以非监督式学习为框架, 结合多机对抗目标信息共享, 利用信息融合提升对抗目标的预测和定位精度. 在决策机制方面, 可通过狼群在合作狩猎场景下群体成员的运动相关性, 结合其社会组织与等级特性, 建立狼群合作狩猎运动模型, 并制定成员交互规则。基于群集运动研究中的个体协调运动模型(如Reynolds三原则), 考虑机动飞行、通信范围、任务激励等约束, 分别设计无人机集群协调运动动力学模型和拓扑规则, 构建多机协同控制律, 保证集群运动的协调一致。为应对频繁出现的外部干扰和突发情况, 可以对狼群合作狩猎运动进行阶段性分解, 构建任务状态切换图以实时应对状态突变, 以增强集群的快速响应。

图1 狼群情报到无人机群对抗决策的映射机制
近年来, 随着人工智能、仿生学等跨学科在工程技术领域的快速发展, 基于狼群行为特征的多无人系统协调控制与协同决策技术成为了广泛研究的热点。无人机集群作为一类特殊的多无人系统, 其决策机理与多无人系统相一致。Weitzenfeld 借鉴狼群捕猎行为提出了一种多机器人驱动控制框架, 可实现捕猎和躲避等不同任务形态动作. 在该狼群捕猎行为模型中, 狼群被分为头狼和猛狼两类, 每种角色可根据探测信息的质量进行策略切换. 通过硬件平台试验和相关数据的记录和分析, 可使机器人模拟狼群游走、跟随、攻击、躲避等行为和任务。Madden等 基于狼群围捕的实证化研究, 重新定义了Weitzenfeld的围捕模型。在该模型中, 狼群中角色以一种基于物理力引导的方式发生变化, 同时增加了对猎物逃跑行为的反应策略。Duan等提出了一种基于狼群行为机制的自主编队控制方法, 采用人工势场法设计了多无人机协同编队控制器, 基于狼群社会组织关系确定了无人机层次编队模型。通过分析多个无人机自主编队与狼群编队行为之间的映射关系, 设计了基于狼群层级行为机制的编队保持控制器. Escobedo等 设计了一系列多智能体系统的移动策略, 以模拟狼群围捕场景. 该控制策略分为两个基于最小安全距离和驱动力控制的分散控制规则, 通过调节相关系数能够再现狼群捕猎行为中跟踪猎物、追捕、包围猎物等主要特征。
未来智能实验室的主要工作包括:建立AI智能系统智商评测体系,开展世界人工智能智商评测;开展互联网(城市)云脑研究计划,构建互联网(城市)云脑技术和企业图谱,为提升企业,行业与城市的智能水平服务。
如果您对实验室的研究感兴趣,欢迎加入未来智能实验室线上平台。扫描以下二维码或点击本文左下角“阅读原文”







![排序及查找----[(冒泡,快速)(拉格朗日,二分)]](http://pic.xiahunao.cn/排序及查找----[(冒泡,快速)(拉格朗日,二分)])


)
)
![[Swift]LeetCode19. 删除链表的倒数第N个节点 | Remove Nth Node From End of List](http://pic.xiahunao.cn/[Swift]LeetCode19. 删除链表的倒数第N个节点 | Remove Nth Node From End of List)






)
