带输入约束的 MPC 路径跟踪控制
MPC 算法是一种基于控制对象模型的控制方法,其优势在于在控制中考虑了
系统的多种物理约束,同时基于模型与当前机器人的反馈信息预估出未来机器人
位姿信息的处理方法可以解决控制迟滞的问题。
4.1 MPC 路径跟踪控制器框架
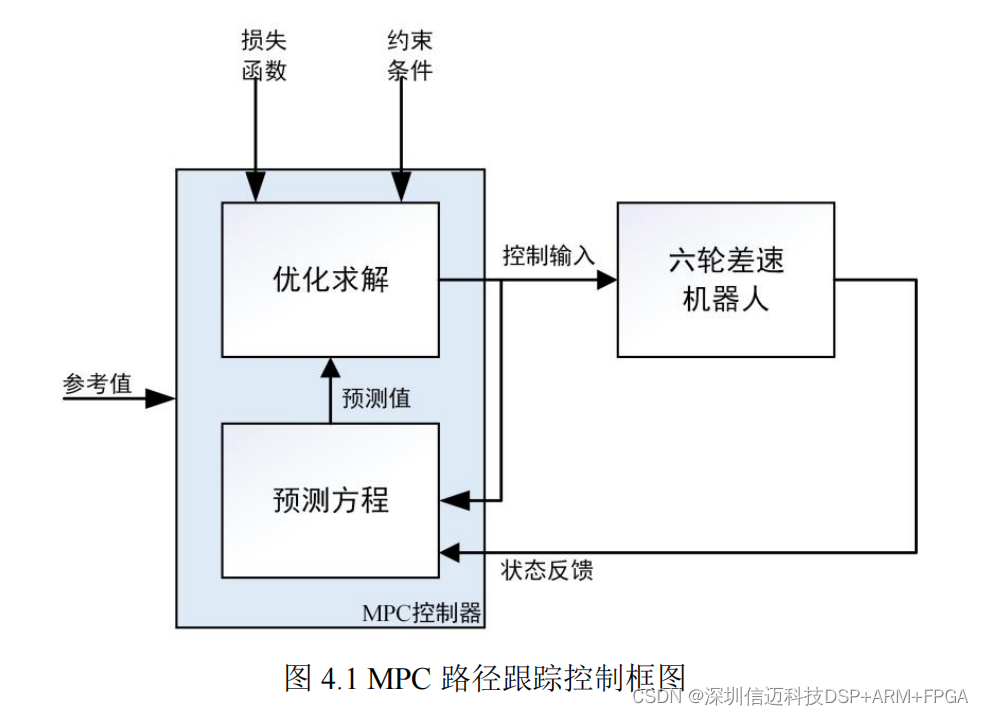
根据第 2 章的算法原理可以搭建机器人控制器框架。首先通过机器人运动学
模型构建预测方程,以控制增量最小为性能指标构造损失函数(又称目标函数),
将参考路径信息与预测方程的输出代入到损失函数中,并结合约束条件求得当前
最优解。当前控制增量的最优解与上一时刻的控制输入结合得到当前时刻控制器
给到机器人的控制量,将控制量通过机器人的映射矩阵将控制量转换成各个电机
的转速,控制机器人的运动,进而实现基于 MPC 的路径跟踪控制。具体的框架如
图 4.1 所示:
4.2 基于线性时变 MPC 的路径跟踪控制
与非线性 MPC 相比,线性时变 MPC 计算量更小,求解更简单,控制响应更
迅速等特点 [57] 。本小节将根据上节得到 SWDMR 运动学模型进行控制器推导,选 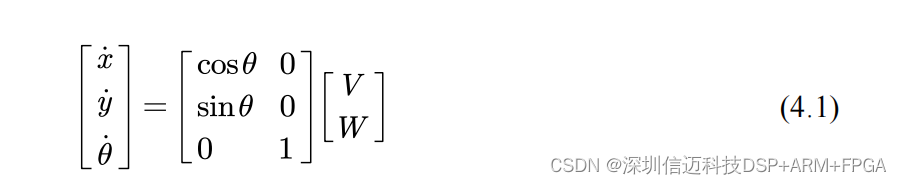
取机器人在大地坐标系下的横向位移量 ,纵向位移量 ,横摆角 组成状态量
,得到关于机器人在大地坐标系下的运动学方程如下:
4.2.2 优化求解
目标函数的构建,就是要确保机器人能够跟踪上期望路径的同时响应更加迅
速、调节更加平稳,这就不仅仅需要考虑机器人实际运行状态与期望值的偏差,更
要考虑控制量的变化趋势。因为如果在调节过程中,控制量前后变化过大,会导致
机器人在跟踪期望路径时有明显的抖动,这不仅不利于机器人的运动调节,对差速
转向的机身结构也会有佷强的冲击。因此为了保证对每个采样周期的控制量的变
化有个限制,避免机器人调节时的猛然抖动。

)




ldirectord工具实现部分节点掉点后将请求发往正常设备进行处理)
场:河南理工大学-C 旅游)




)



)


