
之前打ICRA2018的Tidy Up My Room challenge的时候就已经接触了一些机器人学的内容,不过以偏应用的ROS,轨迹规划,控制居多,对于机械臂和力学确实了解的不多,这学期选了ME300,恶补了一些机械臂的知识,笔记部分内容直接copy自老师ppt,部分内容是自己总结的,我看的两本机器人学教材:
【1】《Introduction to Robotics: Mechanics and Control (4th Edition)》 John J. Craig
【2】《机器人学:建模、控制与视觉》熊有伦 华中科技大学出版社
头图来自minori的机器人学游戏《トリノライン》,参考【百度百科】 【bangumi】
一、机器人的总体和机械结构设计
基本组成:机械部分、传感部分、控制部分
机器人自由度:机器人所具有的独立坐标轴运动的数目。构件所具有的独立运动数目(或确定构件位置的独立参变量的数目)。
开链机构:工作空间大,刚性小,如PUMA562机器人
闭环机构:刚度大,工作空间受限,如Stewart机构 Grubler公式:
其中 n-关节总数,l-连杆数,
其它基本参数:机器人精度、工作范围、最大工作速度、承载能力
机器人的总体设计:确定基本参数、选择运动方式、手臂配置形式、位置检测、驱动和控制方式等。(结构设计时,对各部件的刚度、强度做验算。)
驱动方式:液压(大负载),气动(节拍快),电动(动作复杂/轨迹严格)
传动部件设计:关节-转动关节(Rotary Joint)/ 移动关节(Slide Joint)
二、位姿描述和齐次变换
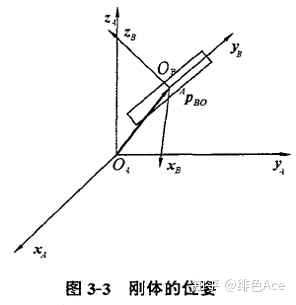
位姿:位+姿,刚体相对参考点的位置和刚体的姿态,描述方法-齐次变换/矢量/旋量/四元素
位置的描述-位置矢量,空间任意点P的位置
姿态的描述-旋转矩阵,n参考坐标系{A} 、直角坐标系{B}与刚体固接,用{B}的三个主单位矢量xB/yB/zB相对于{A}的方向余弦组成的矩阵,表示刚体B相对于坐标系{A}的方位。
旋转矩阵是3x3的方阵,但实际上只有3个独立元素,可以用旋转矩阵的两个性质建立:
1.三个矢量是单位矢量:
2.三个矢量相互垂直:
刚体的位姿描述:位置+姿态
手爪坐标系:
a:手指接近目标物体的方向为z轴,称为接近矢量。
o:两手指连线方向为y轴,称为方位矢量。
n:另外一个矢量反向由右手法则确定,称为法向矢量
坐标变换:平移
绕单轴旋转的基本旋转矩阵:
齐次坐标:用四维向量表示三维空间一点的位置P,称为点的齐次坐标
齐次变换矩阵:
齐次变换
记
齐次变换可以分解成旋转变换和平移变换:
平移:
齐次复合变换的规则:相对固定坐标系变换矩阵左乘,相对变化坐标系右乘
齐次变换求逆,运用性质:
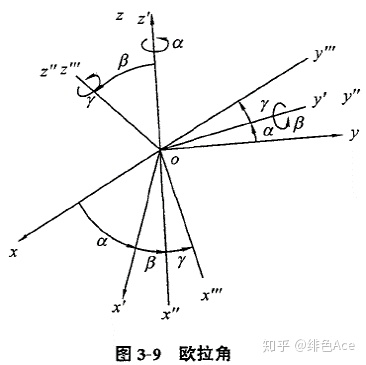
欧拉法:设最初坐标系{B}与参考系{A}重合,首先使{B}绕zB转α角,继而绕yB转β角,最后绕zB转γ角,α-β-γ称为z-y-z欧拉角,这种描述刚体相对坐标系{A}方位的方法称为欧拉法。
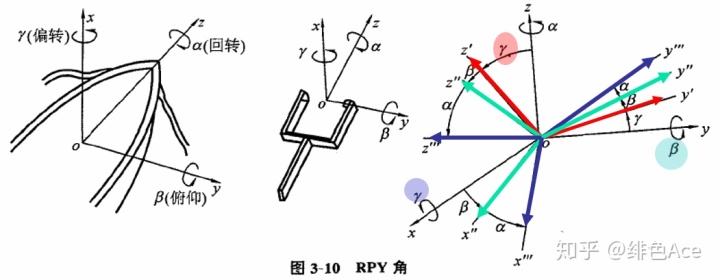
RPY角/RPY变换:nRPY角是描述船舶在海中航行姿态常用的一种方法,船的行驶方向为z轴,绕z轴的旋转角α称为回转(Roll),绕y轴的旋转角β称为俯仰(Pitch),绕x轴的旋转角γ称为偏转(Yaw)。n设最初坐标系{B}与参考系{A}重合,首先使{B}绕xA转γ角,继而绕yA转β角,最后绕zA轴转α角,α、β、γ称为RPY角。
两类矢量:
- 自由矢量:由维数、大小和方向三要素唯一规定,例如速度、力矩。变换仅涉及旋转变换
- 线矢量:维数、大小、方向、作用线四要素唯一规定,例如力。变换旋量法 参考“Kinematics Geometry of mechanisms”
三、操作臂运动学
研究对象:手臂各连杆之间的位移关系、速度关系和加速度关系。
研究目的:寻找相邻连杆之间的运动与任意连杆之间的运动之间的关系。
研究方法:在每个连杆上固接一个坐标系,然后描述这些坐标系之间的关系(D-H齐次变换)
关节:转动关节(Rotary joint)/移动关节(Prismatic joint)
连杆i ( i=1,2,…n,n为机器人含有关节数目,即机器人自由度数)两端有关节i 和 i+1,在驱动装置带动下,连杆将绕或沿关节轴线,相对于前一临近连杆转动或移动。
连杆的尺寸参数:长度
连杆的关系参数:偏置
机器人每个连杆由四个参数ai、αi、di、θi来描述,称为机器人D-H坐标法。(因为提出者是Denavit和Hartenberg~)
转动连杆的D-H变换:绕zi-1轴转θi角->沿zi-1轴移动di->沿xi轴移动ai->绕xi轴转αi
移动连杆的D-H变换:
机器人运动学方程:将机器人位姿从关节空间变换为直角坐标空间描述,求机器人末端操作装置的位姿->机器人运动学正解。
机器人运动学逆解:给定机器人终端位姿,求各关节变量,也称为机器人逆运动学问题,包括存在性、唯一性及解法。一般方法:求机器人运动学逆解常采用臂腕分离的方法,机器人运动学方程包括臂运动及腕运动。机器人总位移为臂终端相对基座的位移加上终端操作装置中心相对臂终端的位移(均在基坐标系中)。机器人关节变量也分臂、腕两部分求解。
四、操作臂的雅可比
这部分真的挺难的,在用微分运动引入雅可比的时候对于不同坐标系微分运动的变换不太好理解,建议着重看怎么用矢量积法来构造雅可比矩阵就好,微分变换记结论。
关节空间->操作空间:运动学正解 操作空间->关节空间:运动学逆解
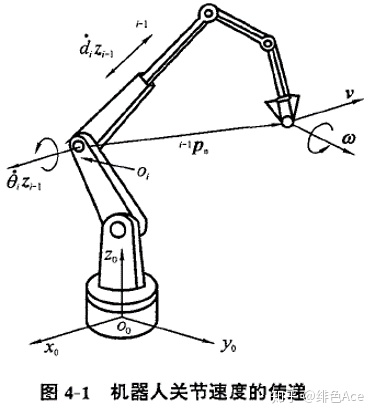
雅克比矩阵:研究操作空间速度与关节空间速度之间的线性映射关系
机器人的关节速度向量:
手爪在基坐标系中的广义速度向量:
v为线速度,w为角速度,从关节空间速度q向操作空间速度V映射的线性关系称为雅可比矩阵,简称Jacobian,记为J:
雅可比矩阵(Jacobian) J:定义为从关节空间速度向操作空间速度V映射的线性关系
微分运动:微分移动+微分转动,
任意两坐标系{A}和{B}之间广义速度的坐标变换:
构造方法:矢量积/微分变换
1.矢量积法:对于有n个关节的机器人,雅可比矩阵为6×n阶矩阵,前三行为位置雅可比矩阵,代表对手爪线速度v的传递比,后三行为方位矩阵,代表相应的关节速度对手爪角速度的传递比。可得分块雅可比矩阵:
对于移动关节
转动关节
2.微分变换法(记结论就好,过程有点麻烦):
移动关节
逆雅克比矩阵:若给定机器人终端手爪的广义速度向量V们可以解出关节速度
逆雅可比矩阵求解:利用逆运动学问题的解,直接对其微分来求J-1,对于带球面腕的机器人可用臂腕分离来求J-1 。当J不是方阵时,不存在J-1,可用广义逆(伪逆)雅可比矩阵来确定关节速度向量。超定-最小方差/欠定-拉格朗日乘子法
雅可比的秩不是满秩的关节矢量q称为奇异形位,即: rank(J(q))<min(6,n)。相应的操作空间中的点P(q)为工作空间的奇异点,此时机器人至少丧失一个自由度,常称机器人处于退化位置。
力雅克比:末端广义力矢量:机器人与外界环境相互作用时,在接触处要产生力f和力矩n,统称为末端广义力矢量。
静止状态下,广义力矢量F应与与各关节的驱动力(或力矩)相平衡,n个关节的驱动力(或力矩)组成的n维矢量:
根据各关节作的虚功之和与末端执行器所作虚功应该相等原则有:
机器人力雅可比:表示静止平衡状态下,末端广义力向关节力映射的线性关系。两坐标系{A}和{B}之间广义操作力的坐标变换关系:




)




 – 运行第一个项目)

)



的输出python)



