原创 | 文 BFT机器人
L3 功能加速落地,政策标准有望明确
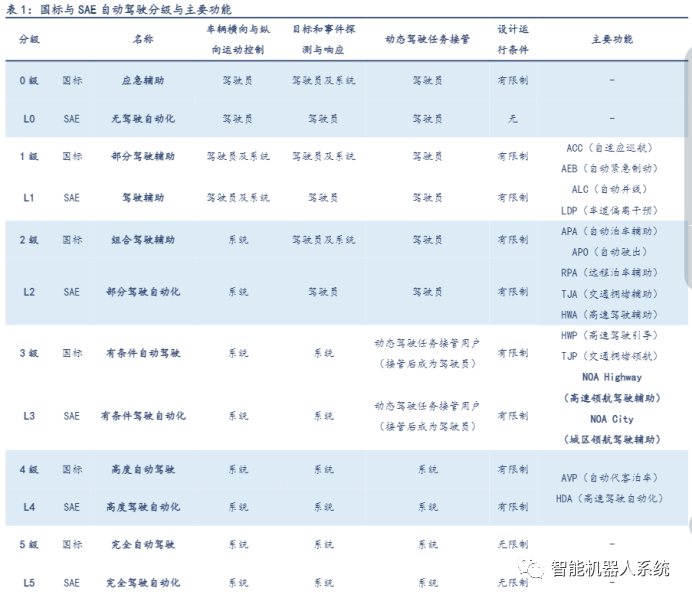
L2 发展日益成熟,L3 功能加速落地。根据市场监管总局发布的《汽车驾驶自动化分级》与 SAE发布的自动驾驶分级标准,自动驾驶主要分为 6 个级别(0 级到 5 级,L0 到 L5)。从车辆控制、目标与事件检测、任务接管等层面看,国标与 SAE 分级的标准基本一致。
L2 及以下级别的主要功能包括 ACC(自适应巡航)、AEB(自动紧急制动)、APA(自动泊车辅助)等,工信部副部长辛国斌表示,2022 年具备组合辅助驾驶功能(2 级)的乘用车新车渗透率达到了34.5%。随着智能化软硬件的不断发展,当前行业正处于 L2 向 L3 过渡的阶段,L3 阶段代表功能如高速/城市 NOA 已逐渐开始落地。
L3 落地阻碍仍存,责任界定仍需明晰。2018 年,美国一辆特斯拉 Model X 在激活“自动驾驶”功能期间变道时发生事故导致驾驶员死亡,该事故引发了事故责任归属的广泛讨论。
由于特斯拉的 Autopilot 仍需手扶方向盘,因此它的智能驾驶级别为 L2 级别驾驶辅助,而不是 L3 级别自动驾驶,最终事故责任被归结于过度依赖 L2 的驾驶员。
无论是国标 3 级还是 SAE 划分标准中的 L3,车辆运动、目标与事件检测均由智能驾驶系统完成,在出现动态驾驶任务后,接管者成为驾驶员,因此正常行驶过程中坐在主驾位上的“乘客”已经不属于实际意义上的驾驶员,因此在 L3 级智能驾驶发生事故之后,人机责任的划分逐渐成为消费者对自动驾驶汽车的重要关切。
作为辅助驾驶迈向自动驾驶的关键节点,L3 标准重要性不言而喻。相比 L1、L2 辅助驾驶主导者是驾驶员,L4、L5 主导者是智驾系统,L3 级别自动驾驶可以认为是辅助驾驶迈向自动驾驶的关键节点。
近年来,部分车企由于 L3 相关政策缺失开始宣传诸如 L2+、L2.9 等概念。随着L3 技术与功能层面已日趋成熟,我们认为当前 L3 的核心问题之一在于是否可以通过在政策法规明确人机共驾的权责。
高阶智驾渐进式迭代逐步得到验证,高速到城市 NOA 的发展路径已逐步走通
自动驾驶渐进式迭代路线逐渐占据上风。自动驾驶领域存在跨越式与渐进式迭代路线之争。前者以 Waymo 为代表,以无人驾驶为目标研发 Robotaxi,达到去掉人类司机的目的。
后者以特斯拉为代表,其主张从 L2 阶段逐渐过渡到 L4 自动驾驶,其主要策略是推动低阶智能驾驶系统(L2)快速前装量产,通过庞大品牌保有量低成本收集数据以训练和迭代算法,最终迈向全自、动驾驶。
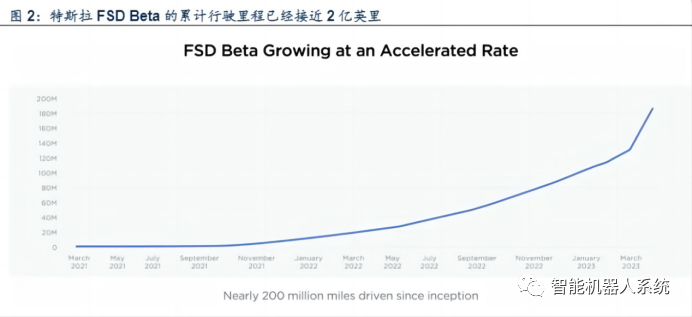
近年来,因 L4 自动驾驶套件成本过高,并且运营区域较小,营收情况较为有限,收支严重不平衡的众多 L4 企业遭遇经营困难。而特斯拉销量与业绩持续攀升,截止 22 年底,有超 40 万名特斯拉车主开通了 FSD Beta 的测试权限,截止 2023 年特斯拉股东大会,FSD 的累计行驶里程已经接近 2 亿英里。

各国 L3 自动驾驶政策对比:德、英、日、韩、美逐步落地
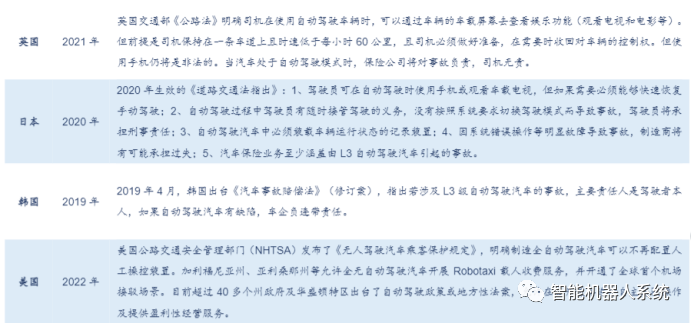
深圳率先试点 德、英、日、韩等国 L3 法规纷纷落地,奔驰 L3 在美试点上路。德国、英国、日本、韩国 L3自动驾驶政策落地,对车辆行驶场景、驾驶员行为、事故责任划分进行了详细规定。在事故认定方面,各国基本明确司机在未做出非法行为的情况下,保险公司或主机厂将承担主要责任。
而在美国,全境范围内的联邦法规仍在制定中,大多数立法由各州通过。奔驰的 L3 级系统DRIVE PILOT 于 23 年初获得内华达州法规上路批准,成为首家在美国实现量产 L3 上路的车企,搭载 DRIVE PILOT 的新款奔驰 S 级轿车、纯电轿车 EQS,最快于 2023 年下半年在美国交付。

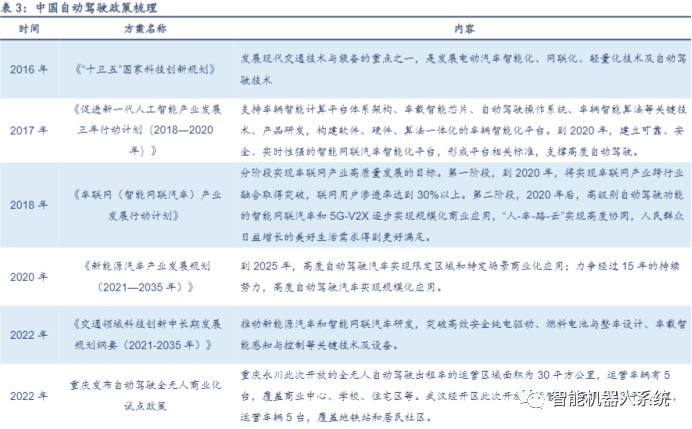
中国:顶层设计与地方试点并举,微观权责划分尚不完善。我国早期自动驾驶政策方向主要以宏观战略规划为主,2016 年国务院发布的《“十三五”国家科技创新规划》正式将自动驾驶提升到国家战略层面,而后“自动驾驶”在政策文件中的出现频率越来越高。
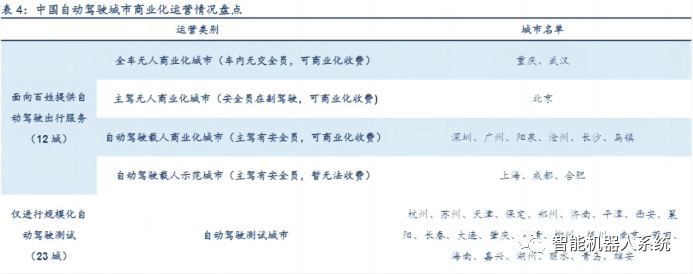
近年来,商业化运营试点逐渐铺开,北京、上海、重庆、武汉等地的自动驾驶运营开始落地。关于事故责任划分问题,相关法规仍需完善,目前仅有深圳于 2022 年 8 月开始实施《深圳经济特区自动驾驶管理条例》,是国内首次对智能网联汽车的准入等级、上路行驶作出具体规定,并且也明确了事故后的责任划分。
高阶智驾渐进式迭代逐步得到验证,高速到城市 NOA 的发展路径已逐步走通
智能驾驶渐进式迭代成为主流,先高速后城市符合智能驾驶发展规律,自动驾驶渐进式迭代路线逐渐占据上风。自动驾驶领域存在跨越式与渐进式迭代路线之争。前者以 Waymo 为代表,以无人驾驶为目标研发 Robotaxi,达到去掉人类司机的目的。
后者以特斯拉为代表,其主张从 L2 阶段逐渐过渡到 L4 自动驾驶,其主要策略是推动低阶智能驾驶系统(L2)快速前装量产,通过庞大品牌保有量低成本收集数据以训练和迭代算法,最终迈向全自动驾驶。
近年来,因 L4 自动驾驶套件成本过高,并且运营区域较小,营收情况较为有限,收支严重不平衡的众多 L4 企业遭遇经营困难。而特斯拉销量与业绩持续攀升,截止 22 年底,有超 40 万名特斯拉车主开通了 FSD Beta 的测试权限,截止 2023 年特斯拉股东大会,FSD 的累计行驶里程已经接近 2 亿英里。
特斯拉引领 L3 级别自动驾驶由高速向城市的渐进式迭代路径。特斯拉的智能驾驶包主要分为AP(Autopilot),EAP(Enhanced Autopilot)增强辅助驾驶以及顶配 FSD(Full Self-Driving)。
2014 年 10 月,特斯拉开始搭载 Autopilot,主要功能包括高速公路上驾驶、刹车和加速。2019年 6 月,特斯拉官方正式向中国选配 FSD 的车型推送最新版本 NOA,把场景从高速公路尝试扩展到城市街道。
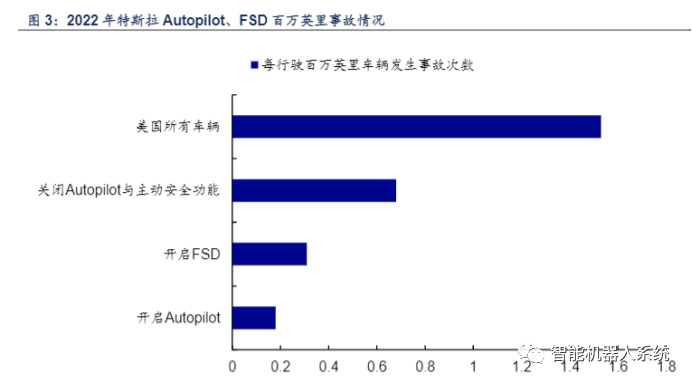
经过多年的迭代,Autopilot、FSD 的安全性能均有明显提升,2022 年,在激活 Autopilot 的情况下,每行驶百万英里(主要是高速公路)发生事故的次数是 0.18。
在开启 FSD 的情况下,每行驶百万英里(主要是非高速公路)发生事故的次数是 0.31;根据 NHTSA的数据,美国所有车辆每行驶百万英里发生事故的次数是 1.53,分别为激活 Autopilot 和 FSD的 8.5、4.9 倍。
我们认为先高速、后城市符合智能驾驶迭代与发展规律。高速 NOA 场景包括车辆实现自主上下匝道、智能变道、智能超车、提示预警、车道保持、自动避让、巡航行驶等技术功能。
相比城市路段,高速路段的自动驾驶技术更简单,高速路段出现的物体种类是非常固定的,大大降低了图像采集与识别的难度,同时高速路段行车速度较快,更易快速积累足够的行驶里程实现智驾系统的快速迭代。
软硬件成本有望下降,应用车型价格带逐渐下探
智能汽车同样遵循摩尔定律,智驾硬件长期成本下降趋势明显。据我们测算,L2+级别自动驾驶感知硬件 BOM 成本约为 4600 元,到 2025 年还有超 30%的降本空间。
包含激光雷达的 L3 智驾感知硬件 BOM 成本接近 11000 元,到 2025 年约为 7500 元,亦有超 30%的降本空间。“重感知,轻地图”路线逐渐跑通,有望大幅减少传感器用量与软件成本。
特斯拉纯视觉方案主要保留了成本较低的摄像头,“BEV+Transformer”方案为轻地图化提供技术可行性,轻地图化亦具有可观的降本能力。在整车层面,L2 车型价格带不断下探,无激光雷达车型也呈现逐渐增加的趋势。
在智能驾驶渐进式的发展路径下,L3 功能正加速落地,高速到城市场景正不断拓展,我们认为在政策、技术、成本端三大核心因素驱动下,智能驾驶拐点逐渐显现。在未来,智能驾驶技术会越来越成熟,普及到家家户户。
作者 | 春花
排版 | 居居手
更多精彩内容请关注公众号:BFT机器人
本文为原创文章,版权归BFT机器人所有,如需转载请与我们联系。若您对该文章内容有任何疑问,请与我们联系,将及时回应。





![C# 使用FFmpeg.Autogen对byte[]进行编解码](http://pic.xiahunao.cn/C# 使用FFmpeg.Autogen对byte[]进行编解码)



)









