人类对未知领域总是充满好奇和敬畏。
因为好奇,所以不断探索,因为敬畏,所以小心谨慎。
谈到人工智能,已经不仅仅是停留在智能手机、家用电器这个层次,要知道,人工智能的作用,不仅仅是为了方便生活,它还有一个重要的使命,那就是,帮助人类,完成对未知领域的探索。
随着人工智能的不断发展,机器人对于人类来说已经不再是一个稀奇的事务,商场里、银行中,随处都可能见到机器人的身影,但是,一个机器人能力再大,终究还是有限的,所以,今天的我们要了解的,就是群体智能,一个存在无线可能的机器人群体——ROBO-MAS多智能体自主协同实验平台
知乎视频www.zhihu.com总体 · 介绍
或许,你听说过它的名字,但是你可能不了解它,或者说,ROBO-MAS对你来说,是比较陌生的。
那么接下来,我们就走近ROBO-MAS,跟随ROBO-MAS一起,探索群体智能的奥妙吧。
ROBO-MAS多智能体自主协同实验平台是基于ROBO-MAS智能机器人搭建的开放式群体智能研究和多机器人智能协同的综合实验系统平台。系统包括:人机交互软件控制系统、ROBO-MAS智能机器人、光学投影定位模块、射频无线网络通信模块、无线充电平台。目前系统已实现智能避障、智能跟随、群体协作循迹、路径规划等功能。
系统的研发初衷是为群体智能研究和多机器人任务协同研究搭建基础科研平台,系统完全开放软硬件接口,提供人机交互软件控制系统中智能机器人路径规划、自主避障、智能跟随、自动循迹、群体协作等群体智能算法所需要的的位置、方向、速度、加速度等数据接口,高度支持二次开发和科研任务移植。
系统为群体智能研究提供模拟仿真平台,可实现群体智能算法的实物验证,以为群体智能算法的推广应用提供实际案例和数据支撑。
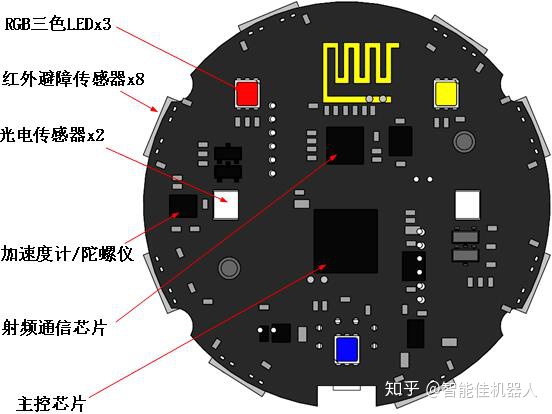
ROBO-MAS智能机器人搭载光电定位传感器、红外避障传感器、六轴惯性传感器模块、主控芯片处理器、无线充电模块、射频无线通信模块、电池管理模块、电机驱动、直流电机、编码器。可实时检测机器人的位置、方位角、速度和加速度等信息,经处理器采集处理后通过无线射频通信模块实时反馈至上位机软件控制系统作为路径规划、避障、跟随和循迹等控制算法的原始数据来源。
产品· 功能
经过上面的总体介绍,你是不是对ROBO-MAS有了一定的了解,那么问题来了,ROBO-MAS都能实现什么功能呢?
1、实时定位
2、自主避障
3、路径规划
4、智能跟随/用户控制
5、自动循迹/路径匹配
6、一键充电/自动返航充电
这样,ROBO-MAS的功能是不是就一目了然了?
知乎视频www.zhihu.comROBO-MAS机器人。视频来源于北京智能佳机器人。
产品 · 尺寸
了解了功能,知道了ROBO-MAS是什么,那么新的疑问一定就随之而来,这一样一个实验平台有多大?如果想要研究它,是不是要单独准备一个大的房间?
这个问题,就是我们接下来该往下看的问题了,静下心来,继续看下去,你要的答案,都在这里。
系统平台尺寸图
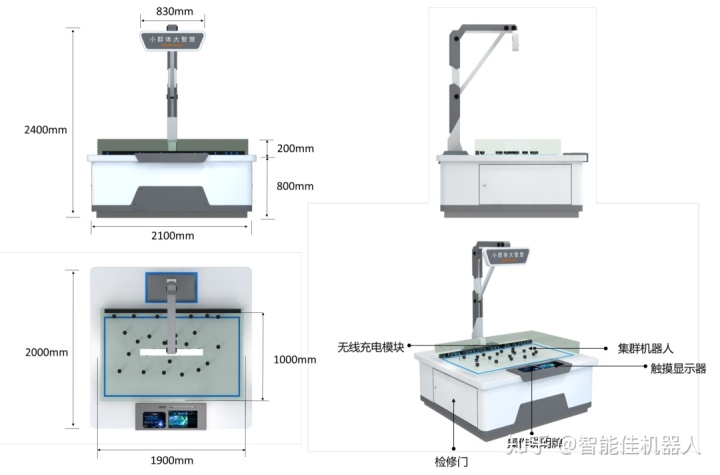
图片来源于北京智能佳机器人。
ROBO-MAS机器人尺寸图

图片来源于北京智能佳机器人。

图片来源于北京智能佳机器人。
图片来源于北京智能佳机器人。
ROBO-MAS · 产品参数

图片来源于北京智能佳机器人。
特点
那么,ROBO-MAS作为一个群体智能,有没有自己的特点呢?答案是肯定的,如果没有特点,那我们也没必要研究它了。
1、智能机器人群体数量可增删,具有良好的扩充性;
2、智能机器人之间无直接关联,增加可控自由度和灵活性
3、智能机器人自主运行和上位机人机交互软件进行实时控制
4、自组织,自组装,即可单独作业也可协同工作
5、(DLP Light Crafter 4500)
定位 · 原理
面向3D机器视觉基于数字光学处理技术的高精度数字光学投影仪,用于精确产生点云编码阵列,ROBO-MAS智能机器人上搭载两个光电传感器,通过感知采集光谱阵列,通过处理器芯片解码计算可以获取两个光电传感器的具体位置坐标,进而可以计算出ROBO-MAS智能机器人的中心位置坐标信息和方位角信息,同时机器人本体搭载的编码器和6轴惯性传感器可获取机器人的速度和加速度信息,基于此用户可实现ROBO-MAS智能机器人群体的定位控制、路径规划控制、循迹跟随控制、自主避障控制等功能,依据这些功能,可实现对智能群体控制算法的实物验证分析。
路径规划 与 避障
基于全局匈牙利算法(全局路径最短)
具体实现:用户在上位机人机交互控制软件系统上指定机器人的位置后,软件内部的路径规划算法为各个机器人分配目标位置,进而控制机器人的行走速度和方向,机器人在行进过程中,依据算法的决策原则,每行进一步,都要进行一次规划路径和速度刷新,可实现动态实时检测群体的行进状态和位置,当群体受到干扰位置和速度发生改变后,控制算法可实时重新为群体进行最优路径规划,直至到达用户指定目标位置结束。
基于单步ORCA算法(避障)
具体实现:机器人群体依据匈牙利算法,即从起始位置到目标位置总路径最短的原则,进行随机分配各个机器人的目标位置,机器人在行进过程中,每行进一步系统依据匈牙利算法会重新规划路径和分配目标位置,以此反复迭代,直至所有机器人都到达最终位置。
但在行进过程中,当群体数量较大,路径复杂,机器人在行进过程中难免会出现路径交叉或者相遇,为了避免群体机器人在行进过程中相遇,上位机人机交互控制软件设计有ORCA算法,通过实时调控群体机器人的速度和运动方向来实现群体间的相互避障。同时,ROBO-MAS通过红外传感器可实现机器人对周围4cm范围内环境的感知,当检测到物体时,通过实时调控机器人的运动状态,可实现对固定物体的躲避。
DEMO
1.智能跟随
2.自主避障
3.图形模式(自主路径规划)
4.画图模式(自主路径规划)
5.实时手势控制
6.环境感知:协同感知
拓展 · 应用
科学研究
1.群体智能算法
2.多机器人智能协同
智能群体模拟演练
1.消防演练(地震、火灾、逃生、救灾)
2.人员自然流动(疫情传播模拟)
3.体育运动模拟(接力赛、足球赛:基于跟随)
4.智能交通
5.物流分配模拟
模拟建模
1.自然群体(蚁群,鱼群,鸟群,细菌)
2.分子扩散(有害气体模型)
3.消息传播模型
游戏娱乐
1.迷宫地图
2.棋子类游戏(跳棋等)
具体 · 实现
集群智能是指一定数量的智能体之间通过局部感知和相对简单的交互方式,完成个体不易实现的任务过程中所涌现出的复杂、强大的集群宏观行为。集群智能是新一代人工智能的重要研究领域,也是单体智能未来发展的必然趋势之一。
集群智能的涌现依赖于群体智能基础层理论、链路层、信息层、决策层以及制导控制层的支撑和保障,涉及群智涌现机理机制、动态自组网、协同感知定位、协同决策规划、协同制导控制、试验验证与综合效能评估等关键技术。
协同控制可为集群智能涌现提供有利的时空协调保障,是集群智能涌现的核心关键技术和制高点技术。旨在为从事集群智能与协同控制相关理论研究、技术创新、产品研制及示范运用的学术界与产业界科研技术人员提供一个全国性、跨系统、跨行业、多学科的综合性学术平台。
以专委会为平台和纽带,更加充分发挥集群智能与协同控制行业内主要优势单位和专家群体的作用,活跃学术气氛,加强产学研用需求牵引和对接、技术交流和互动,推动该领域理论、方法和技术发展及工程化应用,促进指挥与控制学科发展,提高我国科学技术水平。
集群智能与协同控制充分融合人工智能理论、大系统理论、系统工程理论、协同控制理论、指挥与控制理论、导航制导与控制技术、通信与探测技术等多个学科和技术。
具体业务范围和任务包括但不限于:探索集群智能涌现的机理、机制及方法,开展集群智能与协同控制技术领域的学术交流,促进学科发展,推动科技进步。




)




spring MVC配置)






与hashCode())

