1。历史的车轮总是向前,技术更替。在linus 同学发出那句 WFK 后内核进入了设备树时代(站在驱动工程师角度)。
前几天我已经被mach-imx 中的文件折磨的夜不能眠。我终于在一个清晨,喝完一杯咖啡后决定放弃蹩脚的传统device描述方式。
这里我先不讨论内核实现流程的源代码,简单描述下语法,和我的第一个test_platform_device
设备树文件 arch\arm\boot\dts 在修改dst文件后要make dtbs,
http://www.xuebuyuan.com/2128963.html 这篇文章可以恶补下设备书的基础
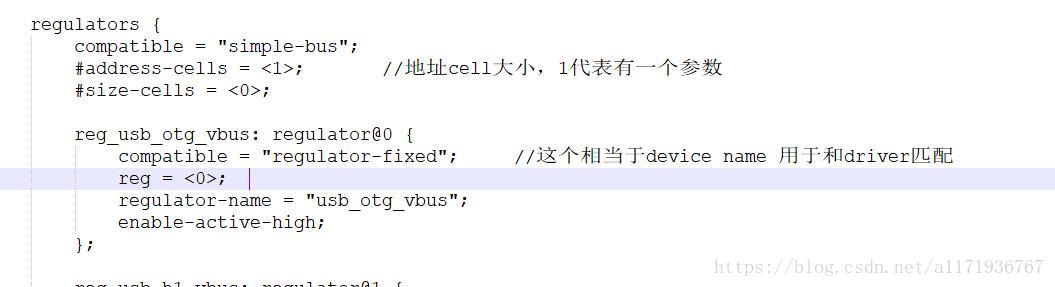
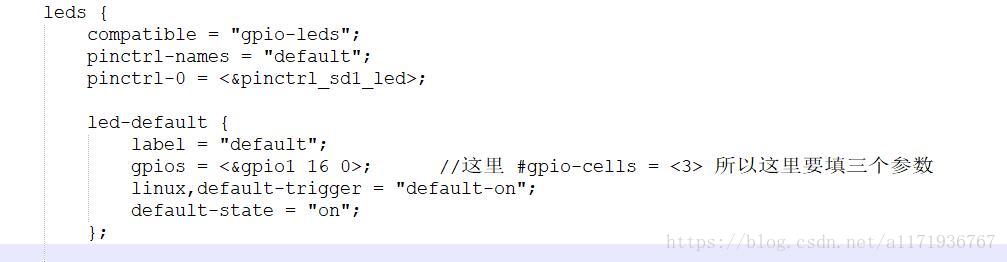
如图是一个完整节点
Documentation\devicetree\bindings 文件夹中有很多的样例可以供开发人员参考
2。 我的测试
我在我的设备树中添加如下代码(这里我把一个ds18b20做成platform设备,仅仅为了练习)
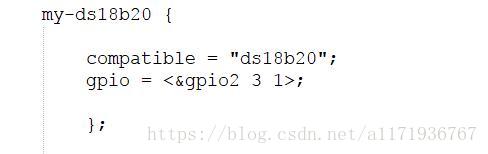
my-ds18b20 {compatible = "ds18b20";gpios = <&gpio2 3 1>; //有更改,以这里为准};我ds18b20使用的是GPIO2_3 管脚。
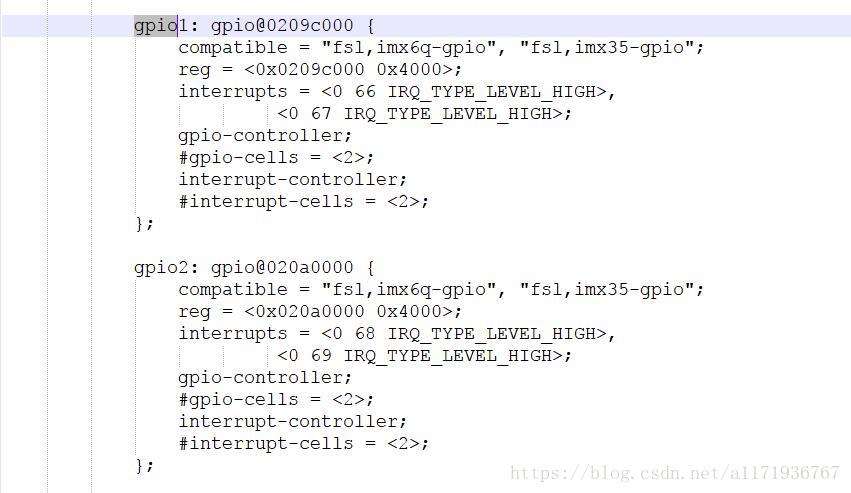
这里的gpios = <&gpio2 3 0>; 在 imx6qdl.dtsi 文件中定义
然后执行 # make dtbs
生成的dtbs文件在dts文件同一目录,烧写 内核 和 DTBS 文件
编写ds18b20的driver 端(为了使结构简单明了,我屏蔽了其他代码,留下了骨架)
#include <linux/module.h>
#include <linux/ioport.h>
#include <linux/netdevice.h>
#include <linux/etherdevice.h>
#include <linux/interrupt.h>
#include <linux/skbuff.h>
#include <linux/spinlock.h>
#include <linux/crc32.h>
#include <linux/mii.h>
#include <linux/of.h>
#include <linux/of_net.h>
#include <linux/ethtool.h>
#include <linux/dm9000.h>
#include <linux/delay.h>
#include <linux/platform_device.h>
#include <linux/irq.h>
#include <linux/slab.h>#include <asm/delay.h>
#include <asm/irq.h>
#include <asm/io.h>static int ds18b20_probe(struct platform_device *pdev)
{struct resource *addr_res = NULL; /* resources found */printk("probe!!!!!!!!!! \n");addr_res = platform_get_resource(pdev, IORESOURCE_MEM, 0);if (addr_res == NULL) printk("get_re error");return 0;
}static int ds18b20_drv_remove(struct platform_device *pdev)
{return 0;
}static const struct of_device_id ds18b20_of_matches[] = {{ .compatible = "my-ds18b20", }, //和dts文件中名字匹配{ /* sentinel */ }
};
MODULE_DEVICE_TABLE(of, ds18b20_of_matches);static struct platform_driver ds18b20_driver = {.driver = {.name = "ds18b20", //可以与dts文件中名字不同.owner = THIS_MODULE,.of_match_table = of_match_ptr(ds18b20_of_matches),},.probe = ds18b20_probe,.remove = ds18b20_drv_remove,};module_platform_driver(ds18b20_driver);MODULE_LICENSE("GPL");编译,拷贝,加载模块

/************************以下为完全测试*************************/
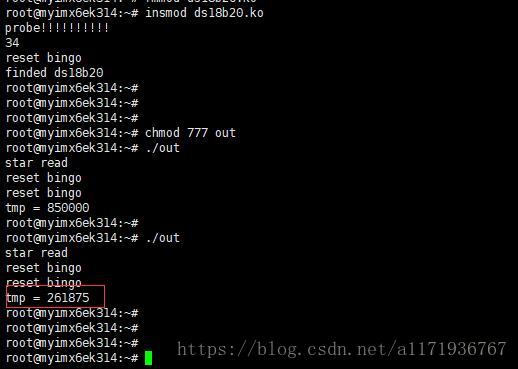
成功获取到温度,有个小bug就是第一获取时温度有问题
以下是完全代码
#include <linux/module.h>
#include <linux/ioport.h>
#include <linux/netdevice.h>
#include <linux/etherdevice.h>
#include <linux/interrupt.h>
#include <linux/skbuff.h>
#include <linux/spinlock.h>
#include <linux/crc32.h>
#include <linux/mii.h>
#include <linux/of.h>
#include <linux/of_gpio.h>#include <linux/of_net.h>
#include <linux/ethtool.h>
#include <linux/dm9000.h>
#include <linux/delay.h>
#include <linux/platform_device.h>
#include <linux/irq.h>
#include <linux/slab.h>#include <asm/delay.h>
#include <asm/irq.h>
#include <asm/io.h>int ds18_gpio = -1;#define GPIO_DS18B20 ds18_gpio#define DS18B20_IO_UP gpio_set_value(GPIO_DS18B20, 1)
#define DS18B20_IO_DOWN gpio_set_value(GPIO_DS18B20, 0)#define DS18B20_OUT gpio_direction_output(GPIO_DS18B20, 1)
#define DS18B20_IN gpio_direction_input(GPIO_DS18B20)static void ds18_write(uint16_t data )
{uint8_t i, temp;DS18B20_OUT;for(i=0; i<8; i++){temp = data & 0x01;data = data >> 1;if(temp) //写1{DS18B20_IO_DOWN;udelay(6); DS18B20_IO_UP;udelay(64); } else{DS18B20_IO_DOWN;udelay(60);DS18B20_IO_UP;udelay(10);}}}static uint8_t ds18_read(void) //读位
{uint8_t data;DS18B20_OUT;DS18B20_IO_DOWN;udelay(6);DS18B20_IO_UP;DS18B20_IN;udelay(9);if(gpio_get_value(GPIO_DS18B20)==1){data =1;}else{data =0;}udelay(45);return data;
}static uint8_t ds18_reads(void){uint8_t i = 0,temp = 0,mydata = 0;for(i=0;i<8;i++){temp = ds18_read();mydata = mydata | (temp<<i); }udelay(2);return mydata;}static uint8_t ds18_reset(void){DS18B20_OUT;DS18B20_IO_DOWN;udelay(300);udelay(300);DS18B20_IO_UP;DS18B20_IN; // 600 usudelay(100);if (gpio_get_value(GPIO_DS18B20) == 0){printk("reset bingo \n");return 0;}printk("reset fail \n");return -1;}static long ds18b20_ctl(struct file * file,unsigned int cmd,unsigned long num)
{uint8_t tp_msb = 0,tp_lsb = 0;uint32_t data;if(cmd){ //readprintk("star read \n");if (ds18_reset() != 0)goto error1;ds18_write(0xCC);udelay(1);ds18_write(0x44); //转换温度//mdelay(100);//ssleep(1);if (ds18_reset() != 0)goto error1;ds18_write(0xCC);udelay(1);ds18_write(0xBE); //读取温度tp_lsb= ds18_reads();udelay(1);tp_msb= ds18_reads();data = tp_msb<<8;data = data | tp_lsb;if( data < 0 ) data = (~data+1) * 625; elsedata = data * 625; printk("tmp = %d \n", data);}return 0;error1:printk("read error \n");return -1;}struct file_operations ds18b20_fops = {.unlocked_ioctl= ds18b20_ctl,};struct miscdevice ds18b20_misc={.minor = 200,.name = "misc_ds18b20",.fops = &ds18b20_fops,};static int ds18b20_probe(struct platform_device *pdev)
{struct resource *addr_res = NULL; /* resources found */int re = -1;printk("probe!!!!!!!!!! \n");ds18_gpio = of_get_named_gpio(pdev->dev.of_node, "gpios", 0);printk("%d\n", ds18_gpio);re = gpio_request(ds18_gpio, "ds18b20");if (re != 0) return -1;if (ds18_gpio > 0){gpio_direction_output(ds18_gpio, 1);}re = ds18_reset(); //检测是否存在if (!re){printk("finded ds18b20 \n");misc_register(&ds18b20_misc);return 0;}else{gpio_free(GPIO_DS18B20);printk("no find ds18b20 \n");return -1;}return 0;
}static int ds18b20_drv_remove(struct platform_device *pdev)
{gpio_free(ds18_gpio);return 0;
}static const struct of_device_id ds18b20_of_matches[] = {{ .compatible = "ds18b20", },{ /* sentinel */ }
};
MODULE_DEVICE_TABLE(of, ds18b20_of_matches);static struct platform_driver ds18b20_driver = {.driver = {.name = "ds18b20",.owner = THIS_MODULE,.of_match_table = of_match_ptr(ds18b20_of_matches),},.probe = ds18b20_probe,.remove = ds18b20_drv_remove,};module_platform_driver(ds18b20_driver);MODULE_LICENSE("GPL");

 ——智能家居整体功能框架)



 ——了解OSI网络模型)


亲测有用)
 ——三次握手与四次挥手、流量控制(滑动窗口)、拥塞控制、半连接状态、2MSL)




 ——SOCKET、TCP、HTTP之间的区别与联系)



