刚体的姿态(attitude)有很多种表示方法,关于这个话题有一篇十分出名的综述[1],也是这篇文章的主要资料来源。这篇文章从二维旋转开始,会讨论旋转矢量、旋转矩阵、四元数、欧拉角等旋转的表示方法。在开始讨论前,需要明确的一点是刚体的姿态具有三个自由度,但使用三个参数对姿态进行全局的、没有奇异性的描述已经被证明是不可能的[2],这也是近来IMU姿态估计的方法大多使用四元数或旋转矩阵的原因。
- 二维旋转的表示
相比在三维空间中的旋转,二维旋转十分直观且易于理解。二维旋转指将二维平面上的一个向量
![]()
(起点为原点)绕原点旋转一个角度
![]()
,得到一个新的向量
![]()
。角度
![]()
可以完全描述这个旋转操作,因此是最直接的二维旋转的表示方法。但需要注意的是,因为角度具有周期性,任何相差
![]()
的整数倍的两个角度所代表的旋转是相同的(只考虑旋转的结果),所以表示角度的空间不是实数集
![]()
,而是一个商空间
![]()
。
这个商空间可以和平面上的单位圆做一一对应:
![]()
,也就是说,我们可以认为单位圆上的每一个点,对应了一个独特的旋转操作,这也是二维旋转的第二种表示方法。最后,如果我们把旋转后得到的向量写成坐标的形式,可以得到:
![]()
(1)
其中
![]()
被称为二维旋转矩阵,可以和
![]()
作一一对应,是二维旋转的第三种表示方法。旋转矩阵是行列式为1的正交矩阵,也就是说它的每个列向量都是单位向量,每两个列向量都是互相正交(垂直)的。
2. 旋转矢量(rotation vector)
三维旋转和二维旋转的不同是:二维旋转永远绕着垂直于平面的轴旋转,但三维旋转可以绕三维空间内的任意一根轴旋转。根据欧拉旋转定理,任何一个三维旋转可以表示为绕一根转轴
![]()
旋转一个角度
![]()
,在这里我们约定转轴
![]()
用单位向量表示。因此最直接的三维旋转的表示方法就是单位向量
![]()
和角度
![]()
,这种方法被称为欧拉轴-角(axis-angle)。为了一些计算上的方便,我们可以把轴和角相乘,得到一个三维空间内的一般向量
![]()
,很容易验证
![]()
和欧拉轴-角是一一对应的,这也就是三维旋转的另一种表示方法,即所谓的旋转矢量。需要注意的是,和二维旋转的角度表示法类似,旋转矢量也具有周期性:任何方向相同,长度相差
![]()
的整数倍(可以将负的长度理解为方向相反的向量)的两个旋转矢量表示相同的旋转。因此如果考虑独特的旋转,我们可以把旋转矢量限制在半径为
![]()
的三维球体内。
如果在三维空间内一个向量
![]()
经过旋转矢量
![]()
所表示的旋转操作后得到
![]()
,那么它们两者有以下关系(Rodrigues' rotation formula):
![]()
(2)
最后需要说明的是,当
![]()
时,旋转矢量
![]()
的导数会出现无穷大的情况,这也是旋转矢量表示方法的奇异点。
3. 旋转矩阵(rotation matrix)
类似于二维旋转,
![]()
和
![]()
的关系也可以用矩阵的形式来表示:
![]()
(3)
其中
![]()
被称为旋转矩阵,也是 IMU 姿态表示中最常用到的方法。表示三维旋转的旋转矩阵
![]()
是一个3×3,行列式为 1 的正交矩阵,也就是说它的每个列向量都是单位向量,每两个列向量互相正交(垂直)。可以证明两个旋转矩阵的乘积还是旋转矩阵,所以全部旋转矩阵构成一个“群”,也就是著名的 SO(3) 群,其中群的乘法就是矩阵的乘法。需要注意的是,矩阵的乘法是不交换的,也就是说一般情况下
![]()
,这意味着连续进行的两个旋转如果交换顺序,那么旋转的结果也会不同。
旋转矩阵可以由旋转矢量计算得到:
![]()
(4)
其中
![]()
表示叉积矩阵,也就是对任意向量
![]()
,
![]()
,它的表达式为:
![]()
(5)
最后需要说明的是,(4)可以写成指数矩阵的表达形式:
![]()
,其中指数矩阵指:
![]()
。
4. 单位四元数(unit quaternion)
四元数是对复数数系的进一步拓展,由四个实数表示:
![]()
。三个虚数单位服从以下的运算规则:
![]()
,
![]()
,
![]()
,
![]()
。三维旋转可以用单位四元数表示,即
![]()
的四元数。四元数有以下几种常见的运算:
(i) 乘法:
(ii) 幂:
(iii) 共轭:
(iv) 逆:
对于单位四元数,它的逆运算和共轭运算的结果是一样的。需要注意的是,与旋转矩阵类似,四元数的乘法也是不交换的。
表示一个三维旋转的单位四元数可以由旋转矢量
![]()
计算得到:
![]()
(6)
将
![]()
代入上式可以得到
![]()
,这意味着
![]()
和
![]()
表示相同的三维旋转。这是单位四元数一个非常重要的性质,它和三维旋转并不是一一对应的,而是 2 比 1 的对应关系。与旋转矩阵类似,(6)也可以用指数函数的形式表示:如果将三维向量
![]()
写为一个实部为 0 的四元数
![]()
,那么
![]()
,其中四元数的指数函数为
![]()
。四元数也可以和旋转矩阵之间互相转换,具体公式可以通过欧拉轴-角表示法(4) 和 (6) 间接得到。
最后,与旋转矩阵类似,一个向量
![]()
经过单位四元数
![]()
所表示的旋转操作后,得到的
![]()
也有很简单的形式:
![]()
(7)
5. 欧拉角(Euler angles)
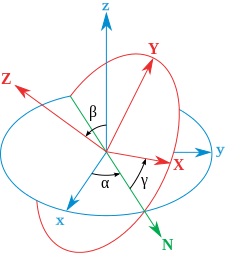
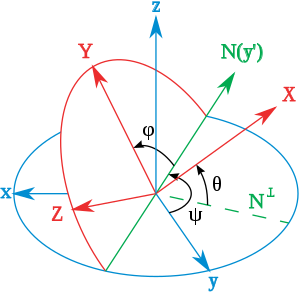
欧拉角大概是最常用到的姿态表示方法了,它的思路是把一个三维旋转分解为三个绕坐标轴的旋转。欧拉角使用时最令人困惑的地方在于它的不同定义方法:根据三个坐标轴的不同顺序,可以有12种定义方法;根据坐标轴是惯性坐标系(extrinsic)还是体坐标系(intrinsic),可以有2种定义方法。因此,一共有24种可能的方法来定义欧拉角,而且这些定义方式没有一种是通用的,因此每次使用欧拉角时一定要说明是哪种定义。在量子力学中,最常用的欧拉角是体坐标系 z-x'-z'';我个人比较喜欢的一种欧拉角是体坐标系 z-y'-x'',其中三个旋转角度也叫作yaw(航向角),pitch(俯仰角)和roll(横滚角)。
体坐标系欧拉角z-x-z,xyz是原始坐标系,XYZ是旋转后的坐标系体坐标系欧拉角z-y-x,xyz是原始坐标系,XYZ是旋转后的坐标系欧拉角可以很方便地转化为旋转矩阵,其中绕三个坐标轴的旋转分别可以转化为如下的旋转矩阵:
(i) 绕x轴旋转
(ii) 绕y轴旋转
(iii) 绕z轴旋转
对于用惯性坐标系定义的欧拉角,可以按坐标轴顺序将以上三个基本旋转矩阵左乘;而用体坐标系定义的欧拉角,则需按坐标轴顺序右乘。例如体坐标系 z-y'-x'' 欧拉角所对应的旋转矩阵是:
![]()
(8)
因为三维旋转具有三个自由度,所以欧拉角是所有姿态的表示方法中需要用到参数最少的一种,也就是只用到三个参数。但是这样的简化也带来了一些不方便的地方,在这里我们讨论欧拉角的两个缺点。第一个是欧拉角具有周期性,但和旋转矢量不同,它的周期性很不直观。以体坐标系 z-y'-x'' 欧拉角为例,它三个角度的范围是:
![]()
,
![]()
,
![]()
。这三个角度不仅以
![]()
为周期,而且通过
![]()
的公式可以验证:
![]()
,
![]()
,
![]()
与
![]()
,
![]()
,
![]()
表示的是相同的三维旋转。这样非常规的周期性在实践中有时难以察觉,而且也使欧拉角本身的含义变得难以理解。欧拉角的第二个缺点是“臭名昭著”的自锁现象(gimbal lock):即当俯仰角
![]()
时,第三步中的 x-轴与第一步中的 z-轴重合,因此第一步绕 z-轴的旋转和第三步绕 x-轴的旋转实际上是一样的,导致欧拉角损失了一个自由度。在自锁点附近,横滚角
![]()
及航向角
![]()
的导数会趋向于无穷大,这也是欧拉角表示方法的奇异点。在使用卡尔曼滤波器时,这样的性质可能会使方差的计算十分不准确,我们会在后面讨论卡尔曼滤波器的文章中详细介绍这个问题。
6. 旋转和姿态的关系
在上面的讨论中,旋转矢量、旋转矩阵、四元数、欧拉角指的都是在三维空间中旋转一个向量的操作,那么这个操作和刚体的姿态有什么关系?这个问题可以用旋转矩阵回答:假设旋转矩阵
![]()
将一个坐标系 xyz 旋转到 x'y'z'(将坐标轴理解为三维向量),那么如果一个向量在 xyz 坐标系中由坐标
![]()
表示,在 x'y'z' 坐标系中由坐标
![]()
表示,这两个坐标有如下的关系:
![]()
(9)
在IMU中,我们计算的
![]()
是将一个向量在体坐标系(x'y'z')里的坐标转为在惯性坐标系(xyz)中的坐标,那么这个旋转矩阵
![]()
的另外一层含义是将惯性坐标系旋转到体坐标系的旋转操作。
如果我们将
![]()
代入(9)可以得到:
![]()
的第一列是体坐标系的x-轴在惯性坐标系里的坐标;类似的,
![]()
的第二、三列分别是体坐标系的 y-轴和 z-轴在惯性坐标系里的坐标。因为的
![]()
逆和它的转置相等,所以
![]()
的第一、二、三行分别是惯性坐标系的 x-轴、y-轴、z-轴在体坐标系里的坐标。
7. 总结
刚体的姿态一般可以用四种方法表示:旋转矢量、旋转矩阵、四元数和欧拉角。刚体的姿态有三个自由度,在四种表示方法中,旋转矢量和欧拉角用了三个参数;四元数用了四个参数和一个约束条件(长度为1);旋转矩阵用了九个参数和六个约束条件(矩阵的正交性)。旋转矢量和欧拉角都具有奇异性,也就是说在某种姿态下,它们的导数会趋向无穷大;四元数没有奇异性,但它和姿态是2比1的对应关系;只有旋转矩阵既没有奇异性,而且和姿态是一一对应的。在IMU姿态估计中,可以使用旋转矩阵、四元数或欧拉角对角速度进行积分,并设计滤波器。在乘法扩展卡尔曼滤波器中(MEKF),是用四元数进行积分,用旋转矢量表示姿态误差及估计姿态的协方差矩阵。