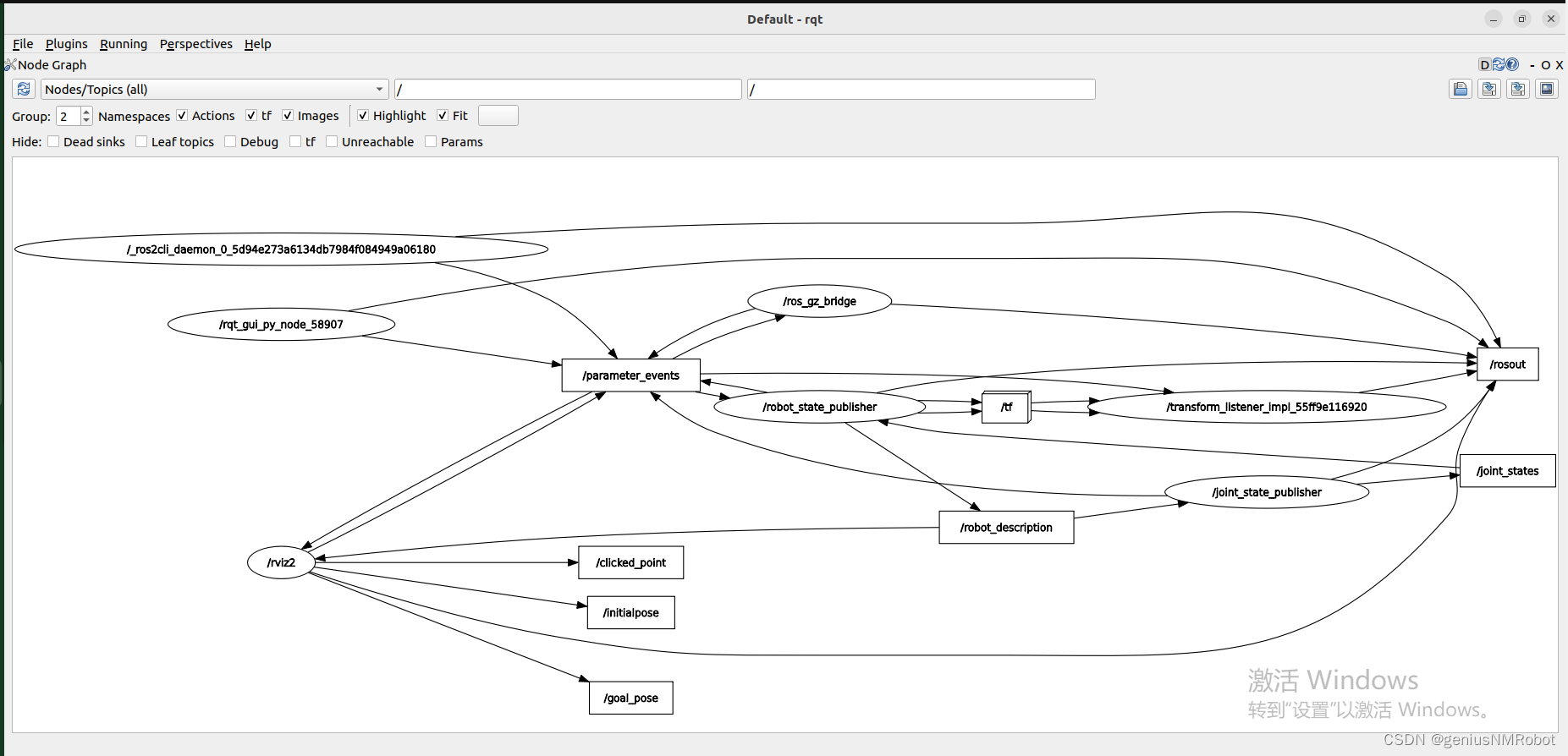
其中右边的:/rosout是一个topic 也就是一个话题
/rosout是一个topic 也是一个话题
可以看到凡是在rqt_graph里面用长方形标识的全都是话题

通过观察可以发现:凡是用椭圆标识的全都是节点
如果切换为Nodes only视图会发现:
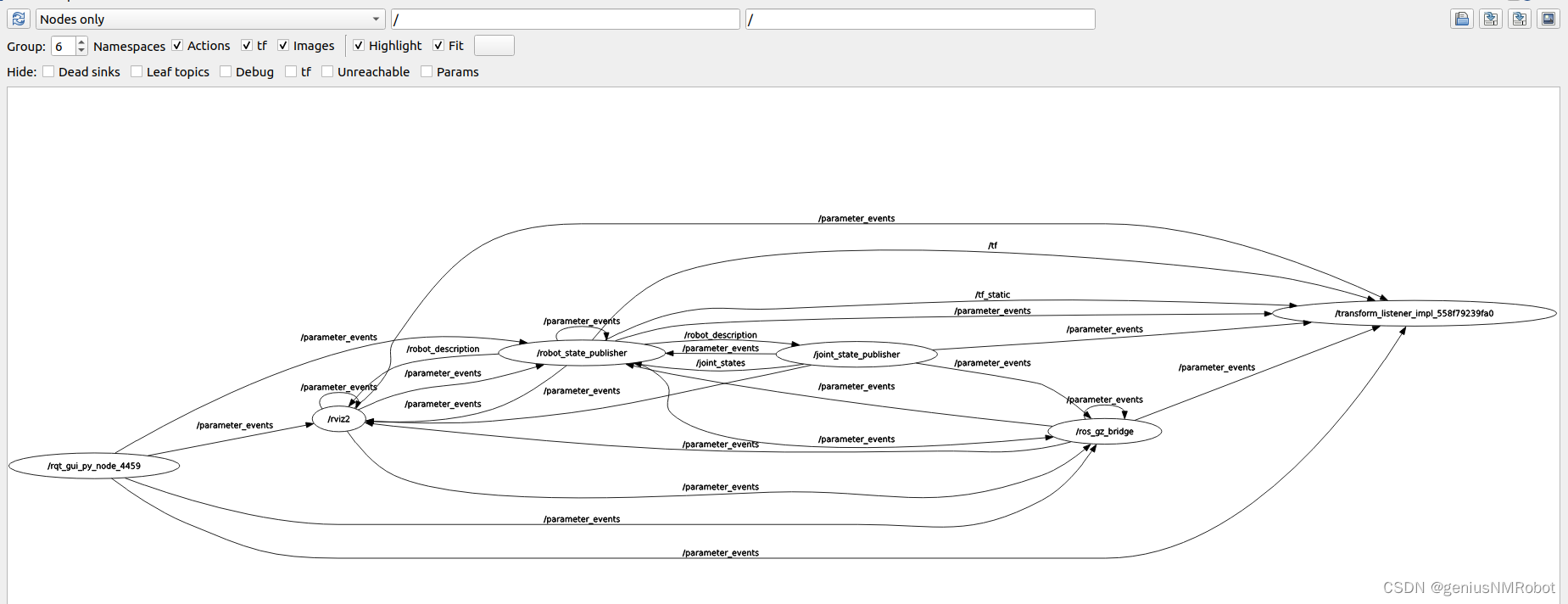
所说的nodes only是指只表示出节点,不标识topic,但是topic还是会画出来,只是不框起来。
这个图卡是可以使用鼠标滚轮放大的,这很重要
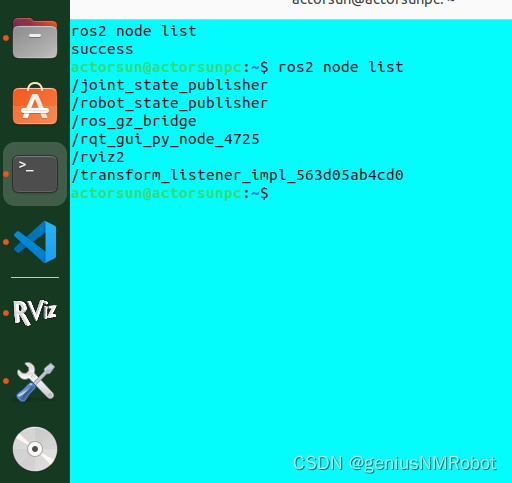
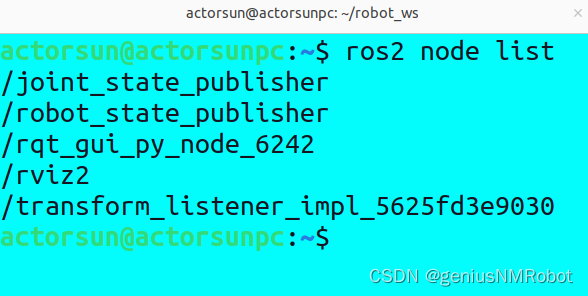
其中的前面3个节点和第5个rviz2节点都是对应软件包里面某个文件创建的,
第4个节点是由rqt_graph创建的,因为我正在使用rqt_graph查看
而最后一个节点很可能是gazebo创建的,用于,为了证明这一点,我现在把gazebo关掉。
这样做不行会导致所以的节点都退出

那么我修改launch文件不启动gazebo:
可以看到:关闭gazebo以后,这个节点还是存在,说明那个不是gazebo发出的节点
然后我关闭了ros_gz_bridge测试看:
还是有,然后就关闭rviz2看看:我就不信还会有
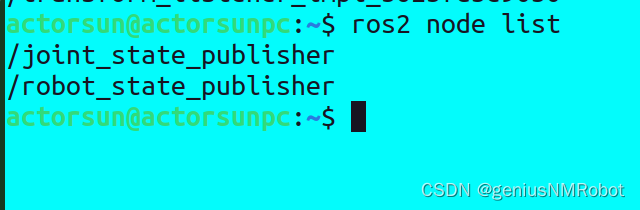
看吧没有了。这就说明:这个节点是rviz2发出来的。
这个时候添加gazebo是这样的:
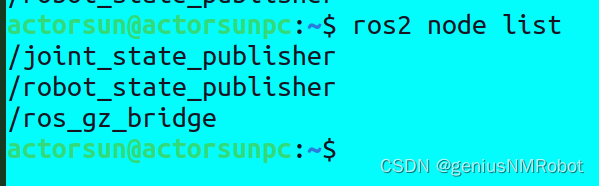
可见gazebo不发出任何的ros2节点,应该就是/ros_gz_bridge充当了gazebo的节点
或者说ros_gz_bridge包把ros2命令转换为gazebo可以识别的内容。vis versal





)
![[Android]CheckBox复选框](http://pic.xiahunao.cn/[Android]CheckBox复选框)

【用图文讲清楚!】)


)


)




